Potrebbero piacerti anche
- Upute DIFDocumento1 paginaUpute DIFPetar VizintinNessuna valutazione finora
- Clarion X ML SupportDocumento48 pagineClarion X ML SupportJa MarkoNessuna valutazione finora
- Migrating From Prior VersionsDocumento38 pagineMigrating From Prior VersionsPetar VizintinNessuna valutazione finora
- Data ModellerDocumento52 pagineData ModellerRoberto Hernandez AmecaNessuna valutazione finora
- Rapid Application DevelopmentDocumento34 pagineRapid Application DevelopmentChen FeliciaNessuna valutazione finora
- Application BrokerDocumento28 pagineApplication BrokerPetar VizintinNessuna valutazione finora
- Planning & Construction of LTE Networks - Ucell - 8Documento33 paginePlanning & Construction of LTE Networks - Ucell - 8haidine_DDBonnNessuna valutazione finora
- Developing Highly Available Dynamic Hybrid Cloud EnvironmentDocumento8 pagineDeveloping Highly Available Dynamic Hybrid Cloud EnvironmentPetar VizintinNessuna valutazione finora
- Clarion KnjigaDocumento120 pagineClarion KnjigaKristinka KikićNessuna valutazione finora
- Developing Highly Available Dynamic Hybrid Cloud EnvironmentDocumento8 pagineDeveloping Highly Available Dynamic Hybrid Cloud EnvironmentPetar VizintinNessuna valutazione finora
- Rapid Application DevelopmentDocumento34 pagineRapid Application DevelopmentChen FeliciaNessuna valutazione finora
- Geolite 2014 en - (En)Documento4 pagineGeolite 2014 en - (En)Petar VizintinNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- FhryhfhfhDocumento3 pagineFhryhfhfhAffan AhmadNessuna valutazione finora
- Riveted JointsDocumento28 pagineRiveted Jointsgnbabuiitg0% (1)
- In Search of Begum Akhtar PDFDocumento42 pagineIn Search of Begum Akhtar PDFsreyas1273Nessuna valutazione finora
- Cultural Practices of India Which Is Adopted by ScienceDocumento2 pagineCultural Practices of India Which Is Adopted by ScienceLevina Mary binuNessuna valutazione finora
- DLPFBSDocumento1 paginaDLPFBSEdnaMarquezMoralesNessuna valutazione finora
- A. Premise Vs Conclusion NotesDocumento8 pagineA. Premise Vs Conclusion NotesEmma PreciousNessuna valutazione finora
- BS 07533-3-1997Documento21 pagineBS 07533-3-1997Ali RayyaNessuna valutazione finora
- Pre Intermediate Talking ShopDocumento4 paginePre Intermediate Talking ShopSindy LiNessuna valutazione finora
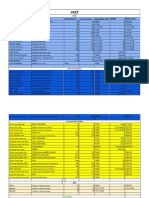
- Jazz PrepaidDocumento4 pagineJazz PrepaidHoney BunnyNessuna valutazione finora
- Corometrics 170 Series BrochureDocumento3 pagineCorometrics 170 Series BrochureCesar MolanoNessuna valutazione finora
- Tutorial: MSBA7003 Quantitative Analysis MethodsDocumento29 pagineTutorial: MSBA7003 Quantitative Analysis MethodsAmanda WangNessuna valutazione finora
- IVISOR Mentor IVISOR Mentor QVGADocumento2 pagineIVISOR Mentor IVISOR Mentor QVGAwoulkanNessuna valutazione finora
- Swanand 2009Documento3 pagineSwanand 2009maverick2929Nessuna valutazione finora
- He Sas 23Documento10 pagineHe Sas 23Hoorise NShineNessuna valutazione finora
- Column Buckling TestDocumento8 pagineColumn Buckling TestWiy GuomNessuna valutazione finora
- SL 4001Documento2 pagineSL 4001ardiNessuna valutazione finora
- Information Brochure: (Special Rounds)Documento35 pagineInformation Brochure: (Special Rounds)Praveen KumarNessuna valutazione finora
- S010T1Documento1 paginaS010T1DUCNessuna valutazione finora
- Rules and Fallacies For Categorical SyllogismsDocumento5 pagineRules and Fallacies For Categorical SyllogismsFatima Ismael PortacioNessuna valutazione finora
- A12 CanSat Technlology Forclimate Monitoring PDFDocumento10 pagineA12 CanSat Technlology Forclimate Monitoring PDFDany PABON VILLAMIZARNessuna valutazione finora
- Ch.1 Essential Concepts: 1.1 What and How? What Is Heat Transfer?Documento151 pagineCh.1 Essential Concepts: 1.1 What and How? What Is Heat Transfer?samuel KwonNessuna valutazione finora
- STFC-2023 International E - conference-BITDocumento6 pagineSTFC-2023 International E - conference-BITRanilprabhu MNessuna valutazione finora
- Business Statistics: Fourth Canadian EditionDocumento41 pagineBusiness Statistics: Fourth Canadian EditionTaron AhsanNessuna valutazione finora
- Lesson 2 (Probability of An Event)Documento4 pagineLesson 2 (Probability of An Event)MarlNessuna valutazione finora
- Practical Research 2.9Documento22 paginePractical Research 2.9Michael GabertanNessuna valutazione finora
- Selecting Appropriate Instructional Materials For Edukasyong Pantahanan at Pangkabuhayan/ Technology and Livelihood EducationDocumento35 pagineSelecting Appropriate Instructional Materials For Edukasyong Pantahanan at Pangkabuhayan/ Technology and Livelihood EducationJhenn Mhen Yhon100% (1)
- Contoh Label Sensus 2022Documento313 pagineContoh Label Sensus 2022Ajenk SablackNessuna valutazione finora
- Aspen Plus User ModelsDocumento339 pagineAspen Plus User Modelskiny81100% (1)
- Dynamic Shear Modulus SoilDocumento14 pagineDynamic Shear Modulus SoilMohamed A. El-BadawiNessuna valutazione finora
- Native Instruments Sibelius Sound Sets - The Sound Set ProjectDocumento3 pagineNative Instruments Sibelius Sound Sets - The Sound Set ProjectNicolas P.Nessuna valutazione finora