Potrebbero piacerti anche
- Power Systems-On-Chip: Practical Aspects of DesignDa EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNessuna valutazione finora
- Intelligent Stepper Motor Driver With DRV8824Documento22 pagineIntelligent Stepper Motor Driver With DRV8824RintheGreatNessuna valutazione finora
- High-Performance D/A-Converters: Application to Digital TransceiversDa EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNessuna valutazione finora
- Project Report On Speed Control of DC Motor by Using PWM TechniqueDocumento75 pagineProject Report On Speed Control of DC Motor by Using PWM Techniquepandyamech80% (15)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Teegala Krishna Reddy Engineering College: Simulation and Implementation of Multi Level Inverter Based BLDC Motor DriveDocumento13 pagineTeegala Krishna Reddy Engineering College: Simulation and Implementation of Multi Level Inverter Based BLDC Motor Drivechandu56Nessuna valutazione finora
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesDa EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNessuna valutazione finora
- 109 Mca486wpmicrostepper Algorithm 01Documento6 pagine109 Mca486wpmicrostepper Algorithm 01Cem DurmazNessuna valutazione finora
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDa EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlValutazione: 5 su 5 stelle5/5 (1)
- DC motor speed control using chopper driveDocumento6 pagineDC motor speed control using chopper driveTan Chuan ChetNessuna valutazione finora
- Monitoring and Control of Single Phase Induction Motor: Power SupplyDocumento16 pagineMonitoring and Control of Single Phase Induction Motor: Power SupplydineshkumarNessuna valutazione finora
- 245915-FinalDocumento13 pagine245915-FinalUtkarsh PrakashNessuna valutazione finora
- Digital Control of Stepper MotorDocumento13 pagineDigital Control of Stepper MotorEngr Nayyer Nayyab MalikNessuna valutazione finora
- TRW-24G 2.4GHz RF Tranceiver Module Data Sheet EDocumento59 pagineTRW-24G 2.4GHz RF Tranceiver Module Data Sheet Ephongphat100% (1)
- Digital Control of Stepper MotorDocumento13 pagineDigital Control of Stepper MotortamimdeenNessuna valutazione finora
- Stepper Motor Control Using The PIC16F684Documento12 pagineStepper Motor Control Using The PIC16F684edward_conzaNessuna valutazione finora
- Minimization of Torque Ripple in Switched Reluctance Motor Drives Using Direct Instantaneous Torque ControlDocumento5 pagineMinimization of Torque Ripple in Switched Reluctance Motor Drives Using Direct Instantaneous Torque ControlAnel Bey TahirbegoviçNessuna valutazione finora
- Direct Torque ControlDocumento5 pagineDirect Torque Controlvineeth kumarNessuna valutazione finora
- Controlling DC Motor Speed Using PWM from CDocumento4 pagineControlling DC Motor Speed Using PWM from CDaniel SileshiNessuna valutazione finora
- Fuzzy Based Reconfigurable Controller For BLDC MotorDocumento7 pagineFuzzy Based Reconfigurable Controller For BLDC MotorkandibanNessuna valutazione finora
- AnotherDocumento51 pagineAnotherRoopam AmborNessuna valutazione finora
- Thesis On Direct Torque ControlDocumento6 pagineThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- BLDC Motor DriverDocumento6 pagineBLDC Motor DriverjpmacabascoNessuna valutazione finora
- FinalYearProject-DC Motor Speed Control PIC16F877ADocumento57 pagineFinalYearProject-DC Motor Speed Control PIC16F877ACata83% (6)
- An 799Documento6 pagineAn 799Xristos LianNessuna valutazione finora
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocumento18 pagineDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992Nessuna valutazione finora
- Control System Based On PLC For WindingDocumento4 pagineControl System Based On PLC For WindinghanzrizNessuna valutazione finora
- Speed Control of 2-Pole DC Motor Using PWM PROTEUS VSM 7.9 & AVR STUDIO (SOFTWARE)Documento4 pagineSpeed Control of 2-Pole DC Motor Using PWM PROTEUS VSM 7.9 & AVR STUDIO (SOFTWARE)IJSTENessuna valutazione finora
- DC Motor Speed Control ThesisDocumento5 pagineDC Motor Speed Control Thesisafloziubadtypc100% (1)
- Space Vector PWM - 1Documento5 pagineSpace Vector PWM - 1guanitouNessuna valutazione finora
- Direct Torque Control of Induction MotorsDocumento6 pagineDirect Torque Control of Induction MotorsInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Sprabw0b PDFDocumento19 pagineSprabw0b PDFAshok KumarNessuna valutazione finora
- Dsp-Controlled Intelligent High-Performance AC Present FutureDocumento8 pagineDsp-Controlled Intelligent High-Performance AC Present FuturePraful YadavNessuna valutazione finora
- Sensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerDocumento17 pagineSensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerVladv123Nessuna valutazione finora
- Speed Control of PMSM by Using DSVM - DTC TechniqueDocumento5 pagineSpeed Control of PMSM by Using DSVM - DTC TechniqueKushagra KhamesraNessuna valutazione finora
- Four Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerDocumento12 pagineFour Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerpriyaNessuna valutazione finora
- CS328 DSPDocumento4 pagineCS328 DSPMohammed BenbrahimNessuna valutazione finora
- Speed Control of DC Motor Using PWM and Microcontroller 8051Documento21 pagineSpeed Control of DC Motor Using PWM and Microcontroller 8051Mohit Keshri100% (1)
- 3-Phase BLDC Motor With Hall Sensors and Speed Closed Loop, Driven by eTPU On MCF523xDocumento44 pagine3-Phase BLDC Motor With Hall Sensors and Speed Closed Loop, Driven by eTPU On MCF523xKanchibhotla Chandra SekharNessuna valutazione finora
- Adaptive Bandwidth Approach ON DTC Controlled Induction MotorDocumento9 pagineAdaptive Bandwidth Approach ON DTC Controlled Induction MotorijicsjournalNessuna valutazione finora
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaDocumento5 pagineSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarNessuna valutazione finora
- Microcontroller Based Advanced Triggering Circuit For Converters/InvertersDocumento6 pagineMicrocontroller Based Advanced Triggering Circuit For Converters/Inverterszameer0509Nessuna valutazione finora
- BLDC Motor Control With LPC1700 - AN10898 - NXPDocumento25 pagineBLDC Motor Control With LPC1700 - AN10898 - NXPAtakan OzturKNessuna valutazione finora
- Seminar Presentation BLDCDocumento27 pagineSeminar Presentation BLDCJustin Jennings100% (1)
- Direct Torque Control ExplainedDocumento7 pagineDirect Torque Control ExplainedAnjana SudarsananNessuna valutazione finora
- Speed-Control Techniques in AC-DC Operated BLDC ApplicationsDocumento10 pagineSpeed-Control Techniques in AC-DC Operated BLDC Applicationslongtrandang5867Nessuna valutazione finora
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocumento5 pagineDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNessuna valutazione finora
- Ijaiem 2013 08 25 054Documento11 pagineIjaiem 2013 08 25 054International Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- PROBLEM STATEMENT FOR TEMPERATURE CONTROL OF POLYHOUSESDocumento36 paginePROBLEM STATEMENT FOR TEMPERATURE CONTROL OF POLYHOUSESAbhishek SinghNessuna valutazione finora
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocumento7 pagineDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- FALDIC-W Series Servo Systems: Akihiro Itou Kayo Tsuzaki Atsushi NaritaDocumento4 pagineFALDIC-W Series Servo Systems: Akihiro Itou Kayo Tsuzaki Atsushi NaritaSayak BoseNessuna valutazione finora
- ARTICLE Onduleurs MultiniveauxDocumento14 pagineARTICLE Onduleurs MultiniveauxKhalid SalmiNessuna valutazione finora
- Design of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsDocumento6 pagineDesign of Multi-Level Inverter and Its Application As Statcom To Compensate Voltage Sags Due To FaultsManpreet SinghNessuna valutazione finora
- Brushless DC Motor Control Using The LPC2141Documento18 pagineBrushless DC Motor Control Using The LPC2141Deepa DevarajNessuna valutazione finora
- Three Phase LocomotiveDocumento138 pagineThree Phase LocomotiveManas Moharana67% (3)
- TB 6560Documento23 pagineTB 6560marekNessuna valutazione finora
- Four - Quadrant Control SystemsDocumento4 pagineFour - Quadrant Control SystemsRICHARDNessuna valutazione finora
- Selective Harmonic Elimination For A Single-Phase 13-Level TCHB Based Cascaded Multilevel Inverter Using FPGADocumento10 pagineSelective Harmonic Elimination For A Single-Phase 13-Level TCHB Based Cascaded Multilevel Inverter Using FPGAsandeepbabu28Nessuna valutazione finora
- Implementation of Microcontroller Based Driver Circuit For Plasma Display PanelDocumento9 pagineImplementation of Microcontroller Based Driver Circuit For Plasma Display Paneladmin2146Nessuna valutazione finora
- 128122-Accelerometer & VelomitorTransducerOperationDocumento22 pagine128122-Accelerometer & VelomitorTransducerOperationNorman MoralesNessuna valutazione finora
- Sistema de Freio: Caminhões Volkswagen 25-390 - TractorDocumento1 paginaSistema de Freio: Caminhões Volkswagen 25-390 - TractorAnderson Luiz100% (1)
- 12oh Motoniveladora Version Standar 5fm Plano ElectricoDocumento2 pagine12oh Motoniveladora Version Standar 5fm Plano Electricomiguelcastillo100% (1)
- Modulo Eletronico de Comando (FRDocumento1 paginaModulo Eletronico de Comando (FRWilson Bueno100% (4)
- Mercedes-Benz Arocs (964) Service Manual PDFDocumento96 pagineMercedes-Benz Arocs (964) Service Manual PDFAnderson Luiz85% (13)
- PV776 21012748Documento128 paginePV776 21012748Registr RegistrNessuna valutazione finora
- Mercedes Atego PDF Service ManualDocumento70 pagineMercedes Atego PDF Service ManualAnderson Luiz65% (17)
- Fault Codes 11 and 12 - Accelerator Pedal Sensor and Idling Contact IssuesDocumento40 pagineFault Codes 11 and 12 - Accelerator Pedal Sensor and Idling Contact IssuesIzz BaharNessuna valutazione finora
- Land Rover 4-Speed Electronic Automatic Transmission SystemDocumento79 pagineLand Rover 4-Speed Electronic Automatic Transmission SystemAnderson Luiz100% (1)
- Microchip SteppersDocumento58 pagineMicrochip SteppersMiodrag MilivojevicNessuna valutazione finora
- Land Rover 4-Speed Electronic Automatic Transmission SystemDocumento79 pagineLand Rover 4-Speed Electronic Automatic Transmission SystemAnderson Luiz100% (1)
- Bosch M7.4.4 Me7.4.4 EobdDocumento66 pagineBosch M7.4.4 Me7.4.4 EobdGustavo Burbano100% (2)
- Volvo FH12-FH16Documento128 pagineVolvo FH12-FH16Aurimas Pistikas100% (18)
- 1N4728A - 1N4764A: 1.0W Zener DiodeDocumento3 pagine1N4728A - 1N4764A: 1.0W Zener DiodeAnderson LuizNessuna valutazione finora
- PBSS4320TDocumento10 paginePBSS4320TAnderson LuizNessuna valutazione finora
- 74HC HCT112Documento15 pagine74HC HCT112Anderson LuizNessuna valutazione finora
- An 1138Documento18 pagineAn 1138Marco Tulio Da SilvaNessuna valutazione finora
- Boss Km400 KeyboardmixerDocumento2 pagineBoss Km400 KeyboardmixerAnderson LuizNessuna valutazione finora
- Irs2092 Product InfoDocumento17 pagineIrs2092 Product InfoAnderson LuizNessuna valutazione finora
- Mixer 10canaisDocumento1 paginaMixer 10canaisAnderson LuizNessuna valutazione finora
- 3 Video Ampop - Tda6107qDocumento16 pagine3 Video Ampop - Tda6107qAnderson LuizNessuna valutazione finora
- Catalog PLC GuideDocumento38 pagineCatalog PLC GuideOsama MohammedNessuna valutazione finora
- NEE - 602 Switchgear and Protection: Unit I: Introduction To Protection SystemDocumento24 pagineNEE - 602 Switchgear and Protection: Unit I: Introduction To Protection SystemmandhirNessuna valutazione finora
- HMGS Medium Voltage Gas-Insulated Switchgear Cubicle Type, Internal Arc-ResistantDocumento24 pagineHMGS Medium Voltage Gas-Insulated Switchgear Cubicle Type, Internal Arc-ResistantLOI HONessuna valutazione finora
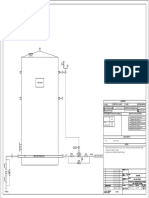
- Hfo Heating System P&idDocumento1 paginaHfo Heating System P&idAbdur RehmanNessuna valutazione finora
- MA - DWM1000 - 2000 - en - 070407 (1) Electromagnetic FSW and FMTRDocumento12 pagineMA - DWM1000 - 2000 - en - 070407 (1) Electromagnetic FSW and FMTRmichaelNessuna valutazione finora
- MZ TuningDocumento24 pagineMZ TuningJawaCz100% (2)
- Stellar - Spare Parts ProposalDocumento1 paginaStellar - Spare Parts ProposalPaul CansinoNessuna valutazione finora
- Parts Manual: Ka-3500Pt Piston Type PumpDocumento10 pagineParts Manual: Ka-3500Pt Piston Type PumpВладиславМасарскийNessuna valutazione finora
- Mitsubishi FD70 Forklift Trucks Service Repair Manual SNF20C-70001-UP PDFDocumento16 pagineMitsubishi FD70 Forklift Trucks Service Repair Manual SNF20C-70001-UP PDFjkfksnjdmNessuna valutazione finora
- Pneumatic Actuator CatalogueDocumento12 paginePneumatic Actuator Cataloguekumar.arunk6784Nessuna valutazione finora
- HCD-GRX9000/RX900: Service ManualDocumento86 pagineHCD-GRX9000/RX900: Service ManualVitorio LogoNessuna valutazione finora
- 6 LightingDocumento26 pagine6 LightingIssei HyoudouNessuna valutazione finora
- Manpower Allocation 17Documento609 pagineManpower Allocation 17Mark BagyendaNessuna valutazione finora
- Governor ActuatorDocumento12 pagineGovernor ActuatorABDUL GHAFOORNessuna valutazione finora
- Prometer 100, Precision Energy Meter for Power MonitoringDocumento4 paginePrometer 100, Precision Energy Meter for Power MonitoringPontasNessuna valutazione finora
- Data Center CalculationsDocumento12 pagineData Center CalculationsEdd Githae100% (1)
- 6055 DB 1401Documento6 pagine6055 DB 1401Francisco MartinezNessuna valutazione finora
- BogiesDocumento1 paginaBogiesCadeco ZamoraNessuna valutazione finora
- Manual Panasonic CU-C12KKV-7 PDFDocumento112 pagineManual Panasonic CU-C12KKV-7 PDFRicardo SouzaNessuna valutazione finora
- 2004 PT Cruiser ManualDocumento341 pagine2004 PT Cruiser Manualerjenkins1100% (1)
- Motor Grader: Performance CharacteristicsDocumento2 pagineMotor Grader: Performance Characteristics【88】 KuroNessuna valutazione finora
- 3000 Series Indicators Instruction Manual: T32ME IndicatorDocumento48 pagine3000 Series Indicators Instruction Manual: T32ME IndicatorGerardo EspinozaNessuna valutazione finora
- EmersonDocumento66 pagineEmersonDidik ListiawanNessuna valutazione finora
- Reference2 - Development of An Automated Coconut Scraping MachineDocumento14 pagineReference2 - Development of An Automated Coconut Scraping MachineRenz Callejo100% (1)
- DS Special Purpose Fuse Links HelioProtection Photovoltaic Fuses NH 800VAC GR ENDocumento14 pagineDS Special Purpose Fuse Links HelioProtection Photovoltaic Fuses NH 800VAC GR ENFiras ouhichiNessuna valutazione finora
- SB1200 Tomahawk Hard LandingDocumento8 pagineSB1200 Tomahawk Hard LandingfelipeNessuna valutazione finora
- 4 20ma ConversionDocumento4 pagine4 20ma ConversionAshwin HariNessuna valutazione finora
- Hallite Quick Reference GuideDocumento264 pagineHallite Quick Reference GuideMarcio RibeiroNessuna valutazione finora
- Jumbo 3D Wheel Aligner PSGDocumento4 pagineJumbo 3D Wheel Aligner PSGJuan Carlos PintadoNessuna valutazione finora
- Spa 308 220VDocumento15 pagineSpa 308 220VMarius BalicaNessuna valutazione finora