Potrebbero piacerti anche
- Root Locus: ROBT303 Linear Control Theory With LabDocumento28 pagineRoot Locus: ROBT303 Linear Control Theory With LabrightheartedNessuna valutazione finora
- Summary On Nonparametric Pricing of Interest Rate Derivative SecuritiesDocumento36 pagineSummary On Nonparametric Pricing of Interest Rate Derivative SecuritiesWang Chun WeiNessuna valutazione finora
- 07.IGA BeamsDocumento45 pagine07.IGA BeamsFran BotteroNessuna valutazione finora
- Stability of Nuclear Reactor: Point Model Analysis: K. Bu Cys, D. ŠvitraDocumento13 pagineStability of Nuclear Reactor: Point Model Analysis: K. Bu Cys, D. ŠvitraUmair FarooqNessuna valutazione finora
- Polynomial Root Motion: Christopher Frayer and James A. SwensonDocumento6 paginePolynomial Root Motion: Christopher Frayer and James A. SwensonMarie.NgoNessuna valutazione finora
- A Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemDocumento10 pagineA Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemAnibal Coronel PerezNessuna valutazione finora
- EE5323 Signals and Systems Laplace TransformDocumento10 pagineEE5323 Signals and Systems Laplace TransformGajini SatishNessuna valutazione finora
- Automatic Control Automatic Control: Root LocusDocumento14 pagineAutomatic Control Automatic Control: Root LocusPhuoc HoNessuna valutazione finora
- Enhanced Eudml Content Accessible Layered PDF Eudml 49037 0Documento12 pagineEnhanced Eudml Content Accessible Layered PDF Eudml 49037 0Youssef S. DablizNessuna valutazione finora
- Ca Array 9 16Documento8 pagineCa Array 9 16Manjunath RamachandraNessuna valutazione finora
- On Sharp Embeddings of Besov and Triebel-Lizorkin Spaces in The Subcritical CaseDocumento8 pagineOn Sharp Embeddings of Besov and Triebel-Lizorkin Spaces in The Subcritical Case李孟書Nessuna valutazione finora
- 443 Bit BoundaryDocumento5 pagine443 Bit BoundarySaint-CyrNessuna valutazione finora
- Beamer RodiakDocumento34 pagineBeamer Rodiakrodiak465006Nessuna valutazione finora
- Fast Factoring Integers by SVP Algorithms - Peter SchnorrDocumento12 pagineFast Factoring Integers by SVP Algorithms - Peter SchnorrbytesombrioNessuna valutazione finora
- Linear SystemsDocumento9 pagineLinear SystemsAhmed M H Al-YousifNessuna valutazione finora
- Convergence in Nonlinear Systems With A Forcing Term: 1 PreliminarsDocumento4 pagineConvergence in Nonlinear Systems With A Forcing Term: 1 PreliminarsprofjnapolesNessuna valutazione finora
- Computational GeometryDocumento36 pagineComputational GeometryAman VermaNessuna valutazione finora
- A Remark On The Existence of Positive Radial Solutions To A Hessian SystemDocumento9 pagineA Remark On The Existence of Positive Radial Solutions To A Hessian SystemCovei Dragos-PatruNessuna valutazione finora
- Improvement of Convergence of An Iterative Metho 2002 Journal of ComputationDocumento13 pagineImprovement of Convergence of An Iterative Metho 2002 Journal of ComputationTuyệt Thư MậtNessuna valutazione finora
- 10.2 The Kernel and Range: W Be A Linear Transformation. ThenDocumento10 pagine10.2 The Kernel and Range: W Be A Linear Transformation. ThenVishaal SudarsanNessuna valutazione finora
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- An Introduction To Gaussian Geometry: Lecture Notes in MathematicsDocumento87 pagineAn Introduction To Gaussian Geometry: Lecture Notes in MathematicsEsmeraldaNessuna valutazione finora
- Journal of Mathematical Analysis and ApplicationsDocumento20 pagineJournal of Mathematical Analysis and ApplicationsJulio Alejo RuizNessuna valutazione finora
- Asymtotic BehaiorDocumento169 pagineAsymtotic BehaiorLuis ValerinNessuna valutazione finora
- Billares CuanticosDocumento7 pagineBillares Cuanticoscaruiz69Nessuna valutazione finora
- Prime Spacing and The Hardy-Littlewood Conjecture B: ) Log ( ) Log (Documento17 paginePrime Spacing and The Hardy-Littlewood Conjecture B: ) Log ( ) Log (idiranatbicNessuna valutazione finora
- Oscillation Theorems For Second-Order Nonhomogeneous Linear Differential EquationsDocumento4 pagineOscillation Theorems For Second-Order Nonhomogeneous Linear Differential Equationsiatrakisg8671Nessuna valutazione finora
- Discrete Maximal Regularity of Time-Stepping SchemDocumento32 pagineDiscrete Maximal Regularity of Time-Stepping Schemأم الخير تافنيNessuna valutazione finora
- Graf 1997 MN PDFDocumento21 pagineGraf 1997 MN PDFJohnNessuna valutazione finora
- Stability of Feedback Control SystemsDocumento31 pagineStability of Feedback Control Systemsjackngare99Nessuna valutazione finora
- Spherically Averaged Endpoint Strichartz Estimates For The Two-Dimensional SCHR Odinger EquationDocumento15 pagineSpherically Averaged Endpoint Strichartz Estimates For The Two-Dimensional SCHR Odinger EquationUrsula GuinNessuna valutazione finora
- Unit 7: Part 1: Sketching The Root Locus: Engineering 5821: Control Systems IDocumento24 pagineUnit 7: Part 1: Sketching The Root Locus: Engineering 5821: Control Systems INikhil PanikkarNessuna valutazione finora
- 586 Joint Inversion OverviewDocumento36 pagine586 Joint Inversion OverviewMustapha Chettouh100% (1)
- Probabilistic Modelling and ReasoningDocumento13 pagineProbabilistic Modelling and ReasoningAlex McMurrayNessuna valutazione finora
- Ee 4C03 Statistical Digital Signal Processing and ModelingDocumento4 pagineEe 4C03 Statistical Digital Signal Processing and ModelingMichelNessuna valutazione finora
- A PROOF OF SUBBARAO'S CONJECTURE, by CRISTIAN-SILVIU RADUDocumento13 pagineA PROOF OF SUBBARAO'S CONJECTURE, by CRISTIAN-SILVIU RADUCercetare ConstanțaNessuna valutazione finora
- Bifurcation Analysis of A Single Species Reacrion-Diffusion Model With Nonlocal DelayDocumento33 pagineBifurcation Analysis of A Single Species Reacrion-Diffusion Model With Nonlocal DelaysecMC ussNessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- Approximate Similarity Solution To A Nonlinear Diffusion Equation With Spherical SymmetryDocumento11 pagineApproximate Similarity Solution To A Nonlinear Diffusion Equation With Spherical SymmetryManuel AyalaNessuna valutazione finora
- Complete Quadratic Lyapunov Functionals Using Bessel LegendreInequalityDocumento6 pagineComplete Quadratic Lyapunov Functionals Using Bessel LegendreInequalityVictor Manuel López MazariegosNessuna valutazione finora
- Oscillations in Neutral Functional Differential Equations" "Documento14 pagineOscillations in Neutral Functional Differential Equations" "戴昀瀚Nessuna valutazione finora
- Chapter 8: Orbital Angular Momentum And: Molecular RotationsDocumento23 pagineChapter 8: Orbital Angular Momentum And: Molecular RotationstomasstolkerNessuna valutazione finora
- 1 s2.0 S037704270301001X MainDocumento9 pagine1 s2.0 S037704270301001X MainRoberto Díaz MatamalaNessuna valutazione finora
- Necessary and Sufficient Condition For Oscillations of Neutral Differential EquationsDocumento14 pagineNecessary and Sufficient Condition For Oscillations of Neutral Differential EquationsbounceeezNessuna valutazione finora
- A Comparison of Monte Carlo, Lattice Rules and Other Low-Discrepancy Point SetsDocumento15 pagineA Comparison of Monte Carlo, Lattice Rules and Other Low-Discrepancy Point SetspostscriptNessuna valutazione finora
- Journal of Engineering Physics and Thermophysics, Vol. 72, No. 3, 1999Documento16 pagineJournal of Engineering Physics and Thermophysics, Vol. 72, No. 3, 1999thotalnNessuna valutazione finora
- Existence and Multiplicity Results For The P-Laplacian With A P-Gradient Term - Leonelo IturriagaDocumento15 pagineExistence and Multiplicity Results For The P-Laplacian With A P-Gradient Term - Leonelo IturriagaJefferson Johannes Roth FilhoNessuna valutazione finora
- Periodic Solutions of Linear Integro-Differential EquationsDocumento10 paginePeriodic Solutions of Linear Integro-Differential EquationsAntonio Torres PeñaNessuna valutazione finora
- An Introduction To The Mathematics of System and Control: Author Efthimios KapposDocumento20 pagineAn Introduction To The Mathematics of System and Control: Author Efthimios KapposHoang GiangNessuna valutazione finora
- A User's Guide To Spherical HarmonicsDocumento14 pagineA User's Guide To Spherical HarmonicsSayantanNessuna valutazione finora
- M/M/1 Queueing ModelDocumento12 pagineM/M/1 Queueing ModelSparrowGospleGilbertNessuna valutazione finora
- 2016 ANM Ranga Vol109Documento22 pagine2016 ANM Ranga Vol109SwaminathanNessuna valutazione finora
- Stability Theory For Ordinary Differential Equations : Journal of Differential EquatioksDocumento9 pagineStability Theory For Ordinary Differential Equations : Journal of Differential EquatioksChetan SharmaNessuna valutazione finora
- Optimum Frame SynchronizationDocumento5 pagineOptimum Frame SynchronizationDawit SeleshNessuna valutazione finora
- Hiroshi Tamura - Random Point Fields For Para-Particles of Any OrderDocumento15 pagineHiroshi Tamura - Random Point Fields For Para-Particles of Any OrderKlim00Nessuna valutazione finora
- Vladimir E. Korepin and Ovidiu I. Pâtu - XXX Spin Chain: From Bethe Solution To Open ProblemsDocumento12 pagineVladimir E. Korepin and Ovidiu I. Pâtu - XXX Spin Chain: From Bethe Solution To Open ProblemsPo48HSDNessuna valutazione finora
- 2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseDocumento18 pagine2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseprawinpsgNessuna valutazione finora
- A Level - Maths - List of FormulaeDocumento10 pagineA Level - Maths - List of Formulaesherlyn may lolNessuna valutazione finora
- 1 Choosing The Lag Length For The ADF TestDocumento11 pagine1 Choosing The Lag Length For The ADF TestBurak Cem BıçkınNessuna valutazione finora
- Final PPT of Tracing of Polar CurvesDocumento66 pagineFinal PPT of Tracing of Polar CurvesNidhi Rai100% (2)
- BEAM DIAGRAMS AND FORMULAS For Various Static Loading Conditions, AISC ASD 8 EdDocumento7 pagineBEAM DIAGRAMS AND FORMULAS For Various Static Loading Conditions, AISC ASD 8 EdEdon MorinaNessuna valutazione finora
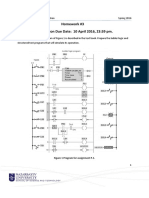
- HW3 PDFDocumento2 pagineHW3 PDFrightheartedNessuna valutazione finora
- AN00131 - USB CDC ECM Class For Ethernet Over USB - 2.0.2rc1 PDFDocumento31 pagineAN00131 - USB CDC ECM Class For Ethernet Over USB - 2.0.2rc1 PDFrightheartedNessuna valutazione finora
- hw1 PDFDocumento6 paginehw1 PDFrightheartedNessuna valutazione finora
- HW5 PDFDocumento1 paginaHW5 PDFrightheartedNessuna valutazione finora
- Robt303 HW3 PDFDocumento1 paginaRobt303 HW3 PDFrightheartedNessuna valutazione finora
- Robt304 Project Report PDFDocumento13 pagineRobt304 Project Report PDFrightheartedNessuna valutazione finora
- Robt401 Manipulator Kinematics FINAL PDFDocumento50 pagineRobt401 Manipulator Kinematics FINAL PDFrightheartedNessuna valutazione finora
- Robt401 Manipulator Kinematics FINAL PDFDocumento50 pagineRobt401 Manipulator Kinematics FINAL PDFrightheartedNessuna valutazione finora
- ROBT308Lecture22Spring16 PDFDocumento52 pagineROBT308Lecture22Spring16 PDFrightheartedNessuna valutazione finora
- ROBT308HW03Spring16 PDFDocumento7 pagineROBT308HW03Spring16 PDFrightheartedNessuna valutazione finora
- ROBT308Lecture24Spring16 PDFDocumento28 pagineROBT308Lecture24Spring16 PDFrightheartedNessuna valutazione finora
- 1: The Learning ProblemDocumento27 pagine1: The Learning ProblemrightheartedNessuna valutazione finora
- Learning From Data Solutions To Selected Exercises: N N M J J N 2Documento4 pagineLearning From Data Solutions To Selected Exercises: N N M J J N 2rightheartedNessuna valutazione finora
- Math 5Documento37 pagineMath 5Anonymous UrzdtCB0INessuna valutazione finora
- Control Theory MaterialDocumento18 pagineControl Theory MaterialalwaysharshNessuna valutazione finora
- Inverted Pendulum With MATLABDocumento26 pagineInverted Pendulum With MATLABNofar GoferNessuna valutazione finora
- Biju Patnaik University of Technology, OrissaDocumento13 pagineBiju Patnaik University of Technology, OrissaSwayamprakash RoutNessuna valutazione finora
- Control Systems Prof. C. S. Shankar Ram Department of Engineering Design Indian Institute of Technology, Madras Lecture - 40 Root Locus 4 Part-2Documento7 pagineControl Systems Prof. C. S. Shankar Ram Department of Engineering Design Indian Institute of Technology, Madras Lecture - 40 Root Locus 4 Part-2HgNessuna valutazione finora
- Chapter 3 Stability of DCSDocumento34 pagineChapter 3 Stability of DCSAnonymous AFFiZnNessuna valutazione finora
- EL 406-Measurements and Control PDFDocumento66 pagineEL 406-Measurements and Control PDFkaruppusamymariNessuna valutazione finora
- 1-Control System Analysis and Design by Chandra, Dinesh Tripathi, A. KDocumento720 pagine1-Control System Analysis and Design by Chandra, Dinesh Tripathi, A. KHiren Dabhi100% (2)
- GATE EE 2010 With SolutionsDocumento49 pagineGATE EE 2010 With SolutionsKumar GauravNessuna valutazione finora
- CS 16 MARK Unit 5 OnlyDocumento6 pagineCS 16 MARK Unit 5 OnlySaravana KumarNessuna valutazione finora
- Control Engineering - IntroductionDocumento26 pagineControl Engineering - IntroductionNithin GowdaNessuna valutazione finora
- Gujarat Technological University: W.E.F. AY 2018-19Documento5 pagineGujarat Technological University: W.E.F. AY 2018-19gecg ICNessuna valutazione finora
- The Lecture Contains:: Lecture 24: State Space Representation of MIMO SystemDocumento8 pagineThe Lecture Contains:: Lecture 24: State Space Representation of MIMO SystemdhineshpNessuna valutazione finora
- Control System Lab Manual by AMIT KUMARDocumento35 pagineControl System Lab Manual by AMIT KUMARamit kumar83% (6)
- Gatepapers EC GATE'14 Paper 04Documento30 pagineGatepapers EC GATE'14 Paper 04raja_4uNessuna valutazione finora
- CS 2255 Control Systems Question BankDocumento62 pagineCS 2255 Control Systems Question BankreporterrajiniNessuna valutazione finora
- Control Manual Lab 11 PDFDocumento14 pagineControl Manual Lab 11 PDFMuhammad ShayanNessuna valutazione finora
- Control: Study With A Pilot CraneDocumento8 pagineControl: Study With A Pilot CraneMICHAELL IBBAN GARCIA PERDOMONessuna valutazione finora
- Mcqs For CSDDocumento4 pagineMcqs For CSDBhautik DaxiniNessuna valutazione finora
- Principles and Practice of Automatic Process Control: Carlos A. Smith, PH.D., P.EDocumento11 paginePrinciples and Practice of Automatic Process Control: Carlos A. Smith, PH.D., P.EDaniel GarciaNessuna valutazione finora
- EX602Documento25 pagineEX602jeetendrasidhiNessuna valutazione finora
- Autopilot Design With Root-LocusDocumento36 pagineAutopilot Design With Root-LocusPythonraptorNessuna valutazione finora
- MAEG3050Documento5 pagineMAEG3050LeungSiuYapNessuna valutazione finora
- Control System Design of LTI Systems Using MATLABDocumento77 pagineControl System Design of LTI Systems Using MATLABChawalit WutiananchaiNessuna valutazione finora
- Control Tutorials For MATLAB and Simulink - Introduction - Digital Controller DesignDocumento12 pagineControl Tutorials For MATLAB and Simulink - Introduction - Digital Controller DesignYasir AlameenNessuna valutazione finora
- Svcet: 1. Define BIBO StabilityDocumento3 pagineSvcet: 1. Define BIBO Stabilityrep domNessuna valutazione finora
- Nolinearities - ServoMechanisms and Rgulating System Design - TextDocumento696 pagineNolinearities - ServoMechanisms and Rgulating System Design - Textsdpsk100% (1)
- Course Project SampleDocumento8 pagineCourse Project SampleShumaila NaveedNessuna valutazione finora
- Control Systems and Design ProblemsDocumento14 pagineControl Systems and Design Problems12onn1eNessuna valutazione finora
- Matlab: The Language of Technical ComputingDocumento27 pagineMatlab: The Language of Technical Computingrauk83Nessuna valutazione finora