Potrebbero piacerti anche
- RMU SiemensDocumento92 pagineRMU SiemensMoazam Ali100% (1)
- DDDD DDDD DDDDDDDDDD (DD)Documento5 pagineDDDD DDDD DDDDDDDDDD (DD)Moazam AliNessuna valutazione finora
- 2 DOF Helicopter Courseware Sample For MATLAB UsersDocumento10 pagine2 DOF Helicopter Courseware Sample For MATLAB UsersMoazam AliNessuna valutazione finora
- These Packages Can Really Take The Heat Allow Sensing Upto 50 Amp Continuous Current With Proper PCB DesignDocumento2 pagineThese Packages Can Really Take The Heat Allow Sensing Upto 50 Amp Continuous Current With Proper PCB DesignMoazam AliNessuna valutazione finora
- Method Overloading: Argument Lists Could Differ inDocumento9 pagineMethod Overloading: Argument Lists Could Differ inMoazam AliNessuna valutazione finora
- QNET User ManualDocumento1 paginaQNET User ManualMoazam AliNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Study On Static and Dynamic Characteristics of Moving Magnet Linear CompressorsDocumento11 pagineStudy On Static and Dynamic Characteristics of Moving Magnet Linear CompressorssubruaNessuna valutazione finora
- Pressure Drop CalculationDocumento13 paginePressure Drop CalculationknsaravanaNessuna valutazione finora
- h31 Higher Order Derivatives Velocity and AccelerationDocumento2 pagineh31 Higher Order Derivatives Velocity and AccelerationChristine StraubNessuna valutazione finora
- Forced Response of Swirl Stabilized Flames in Hydrogen Enriched Gas TurbinesDocumento129 pagineForced Response of Swirl Stabilized Flames in Hydrogen Enriched Gas TurbinesLi-An DingNessuna valutazione finora
- Destructive TestingDocumento42 pagineDestructive TestingHyori AnapadaNessuna valutazione finora
- ESSAY ONE - Idiomaterial PhysicsDocumento49 pagineESSAY ONE - Idiomaterial PhysicsMichael Lee Hill100% (2)
- Chapter 1 2021Documento53 pagineChapter 1 2021Aween Mohamad ZukiNessuna valutazione finora
- Slope Stability Analysis Manual CalculationsDocumento30 pagineSlope Stability Analysis Manual Calculationsmohdpat0593% (28)
- IScodes Soil DynamicsDocumento128 pagineIScodes Soil DynamicsRajashekar.PNessuna valutazione finora
- Physical Chemistry - Kinetic T3kDocumento9 paginePhysical Chemistry - Kinetic T3ksolhhNessuna valutazione finora
- Experiment 6: Simulations of Photonic Crystal StructuresDocumento11 pagineExperiment 6: Simulations of Photonic Crystal StructuresKishlay KushwahaNessuna valutazione finora
- Final ProjectDocumento4 pagineFinal ProjectChacho BacoaNessuna valutazione finora
- Laws of Corrresponding States - Nelson and ObertDocumento4 pagineLaws of Corrresponding States - Nelson and ObertIvan RodrigoNessuna valutazione finora
- Orthogonal and Diagonal Grid Slabs Analysis Using E TABSDocumento10 pagineOrthogonal and Diagonal Grid Slabs Analysis Using E TABSEditor IJTSRDNessuna valutazione finora
- Chapter Two Review of Related Literature and Studies 2.1 EarthquakesDocumento8 pagineChapter Two Review of Related Literature and Studies 2.1 EarthquakesJholo BuctonNessuna valutazione finora
- Chapter 13: Kinetics of A Particle: Force and Acceleration: 13.1 Newton's Laws of MotionDocumento5 pagineChapter 13: Kinetics of A Particle: Force and Acceleration: 13.1 Newton's Laws of MotionideepujNessuna valutazione finora
- Bethe Lattice PaperDocumento13 pagineBethe Lattice PaperArdani MunaqiNessuna valutazione finora
- 1 s2.0 S0149197018301525 MainDocumento10 pagine1 s2.0 S0149197018301525 Mainait hssainNessuna valutazione finora
- Grade 7: Module 2, Quarter 3 Lesson 2.1Documento29 pagineGrade 7: Module 2, Quarter 3 Lesson 2.1Judy Caroline CatacutanNessuna valutazione finora
- Newton's Law ExerciseDocumento3 pagineNewton's Law ExerciseMaridjan WiwahaNessuna valutazione finora
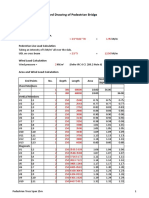
- Preparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsDocumento19 paginePreparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsRoshan KejariwalNessuna valutazione finora
- Goyal Brothers Prakashan Physics Solutions Class 10 Chapter 1 ForceDocumento46 pagineGoyal Brothers Prakashan Physics Solutions Class 10 Chapter 1 ForceCherryNessuna valutazione finora
- Design of Flat Slab by DDMDocumento16 pagineDesign of Flat Slab by DDMNafees Imitaz100% (1)
- Gas Laws CrosswordDocumento2 pagineGas Laws CrosswordHailey Rutherford0% (1)
- New EM1Documento19 pagineNew EM1blagehhNessuna valutazione finora
- S5 L04 Buckling in Aircraft StructuresDocumento28 pagineS5 L04 Buckling in Aircraft StructuresDeva IsmayaNessuna valutazione finora
- Residential Structural Design Design of Slab 1702058853Documento30 pagineResidential Structural Design Design of Slab 1702058853Gys AnamaliNessuna valutazione finora
- A Tutorial On Initialising An Eclipse Reservoir ModelDocumento19 pagineA Tutorial On Initialising An Eclipse Reservoir ModelDhiaa LaMiNessuna valutazione finora
- QUICK SchemeDocumento25 pagineQUICK SchemeMesutÖzilNessuna valutazione finora
- Lug AnalysisDocumento15 pagineLug AnalysisAfzalul Karim Nirvick0% (1)