Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Indigenously designed servo voltage stabilizer controllerDocumento39 pagineIndigenously designed servo voltage stabilizer controllershalu29Nessuna valutazione finora
- Sinewave Inverter DC Capacitor Ripple CurrentDocumento6 pagineSinewave Inverter DC Capacitor Ripple Currentshalu29Nessuna valutazione finora
- Future Value TablesDocumento123 pagineFuture Value TablesShankar ReddyNessuna valutazione finora
- Laboratory Tests Predict Retention and Drainage Aid PerformanceDocumento14 pagineLaboratory Tests Predict Retention and Drainage Aid Performanceshalu29Nessuna valutazione finora
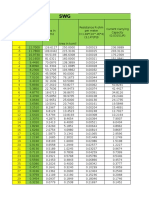
- SWG & MM ConversionDocumento70 pagineSWG & MM Conversionshalu2980% (10)
- Chemical Details For Paper IndustriesDocumento2 pagineChemical Details For Paper Industriesshalu29Nessuna valutazione finora
- Details of Chemical VendorsDocumento3 pagineDetails of Chemical Vendorsshalu29Nessuna valutazione finora
- UChip PIC16F72 Based Relay TIMER Board CircuitDocumento1 paginaUChip PIC16F72 Based Relay TIMER Board Circuitshalu29Nessuna valutazione finora
- UChip PIC16F72 Based Relay TIMER Board CircuitDocumento1 paginaUChip PIC16F72 Based Relay TIMER Board Circuitshalu29Nessuna valutazione finora
- Household Power & Energy Consumption CalculationDocumento2 pagineHousehold Power & Energy Consumption Calculationshalu29Nessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Microprocessor Systems & Interfacing EEE-342: Comsats UniversityDocumento7 pagineMicroprocessor Systems & Interfacing EEE-342: Comsats UniversityBilal HabibNessuna valutazione finora
- Frequency Converter Type Vacon NX For Alimak's Hoists and Lifts User's ManualDocumento27 pagineFrequency Converter Type Vacon NX For Alimak's Hoists and Lifts User's Manualsulthan1975Nessuna valutazione finora
- ADOH NanoBoard3000 RS 232SerialInterface 120312 1844 45872Documento2 pagineADOH NanoBoard3000 RS 232SerialInterface 120312 1844 45872Bones BrennanNessuna valutazione finora
- Compact Rectifier Module for Telecom and Network ApplicationsDocumento2 pagineCompact Rectifier Module for Telecom and Network ApplicationsleonardomarinNessuna valutazione finora
- BRC7E83 Operation Manual DaikinDocumento12 pagineBRC7E83 Operation Manual Daikinkalai arasanNessuna valutazione finora
- Mobile Robot Chapter 7: The Motors of The Robot (V.4a)Documento18 pagineMobile Robot Chapter 7: The Motors of The Robot (V.4a)Carlos RamirezNessuna valutazione finora
- Nova Ii & Nova Iv ReceiversDocumento4 pagineNova Ii & Nova Iv ReceiversTlacat V LaolliNessuna valutazione finora
- 31010NSM-UPS2000-G - (3 kVA C10 kVA) - V2 V100R001C11 User Manual Draft BDocumento86 pagine31010NSM-UPS2000-G - (3 kVA C10 kVA) - V2 V100R001C11 User Manual Draft BNCT Net Company TelecomNessuna valutazione finora
- Internship Report Pakistan Telecommunication Company Limited, BahawalpurDocumento30 pagineInternship Report Pakistan Telecommunication Company Limited, BahawalpurTooba AliNessuna valutazione finora
- FINAL Harmonic Study Report - HJI - First PhaseDocumento37 pagineFINAL Harmonic Study Report - HJI - First Phasemanu100% (1)
- Minor Project SynopsisDocumento3 pagineMinor Project SynopsisHappy RajputNessuna valutazione finora
- Synchronization For QDPSK - Costas Loop and Gardner Algorithm Using FpgasDocumento5 pagineSynchronization For QDPSK - Costas Loop and Gardner Algorithm Using FpgasSatya NagendraNessuna valutazione finora
- Blind Navigation Using RFID For Indoor EnvironmentDocumento15 pagineBlind Navigation Using RFID For Indoor EnvironmentTruptiiiiNessuna valutazione finora
- Comparison of Outer Rotor Radial Flux and Axial Flux PM Motors For CMG ApplicationDocumento6 pagineComparison of Outer Rotor Radial Flux and Axial Flux PM Motors For CMG ApplicationsosiNessuna valutazione finora
- Frequency Response Part1Documento10 pagineFrequency Response Part1Mira BunsuNessuna valutazione finora
- MiCOM P44XDocumento8 pagineMiCOM P44XMahesh YadaNessuna valutazione finora
- CompalDocumento71 pagineCompalPaulo RochaNessuna valutazione finora
- Lesson 6 PID Control of Heat Exchanger Temp PDFDocumento2 pagineLesson 6 PID Control of Heat Exchanger Temp PDFJenny GoNessuna valutazione finora
- Thyristors & Triacs - Ten Golden RulesDocumento11 pagineThyristors & Triacs - Ten Golden RulesVlad ThalheimerNessuna valutazione finora
- Sharp Lc-37d42u Lc-37d43u Lc-C3742u Supp1Documento6 pagineSharp Lc-37d42u Lc-37d43u Lc-C3742u Supp1Carlos MoratoNessuna valutazione finora
- Manual Do Operador IL NT 12-2008Documento9 pagineManual Do Operador IL NT 12-2008albertooliveira100% (1)
- Dell Inspiron 1440 Wistron Alba UMA 08243 91.4BK01.001 Rev 1 SchematicsDocumento61 pagineDell Inspiron 1440 Wistron Alba UMA 08243 91.4BK01.001 Rev 1 SchematicsBablu SharmaNessuna valutazione finora
- Formula Notes Network AnalysisDocumento9 pagineFormula Notes Network AnalysisSubramanyam Kamatham100% (1)
- PID Speed ControlDocumento9 paginePID Speed ControlMilinda Seneviratne100% (1)
- Patient Monitor Maintenance CheckDocumento2 paginePatient Monitor Maintenance CheckDickyNessuna valutazione finora
- TRSS Overview Presentation - SCHNEIDERDocumento99 pagineTRSS Overview Presentation - SCHNEIDERDante FalconNessuna valutazione finora
- Led TV : Owner'S ManualDocumento24 pagineLed TV : Owner'S Manualhadi yanNessuna valutazione finora
- Littelfuse ProtectionRelays SE 601 DatasheetDocumento1 paginaLittelfuse ProtectionRelays SE 601 DatasheettrueavatharNessuna valutazione finora
- Inovance Md310 VFD Quick Guide English 20-4-20Documento64 pagineInovance Md310 VFD Quick Guide English 20-4-20phu chuNessuna valutazione finora
- 6-Pin Wire Harness Assembly Installation GuideDocumento2 pagine6-Pin Wire Harness Assembly Installation Guidelucian stoianofNessuna valutazione finora