Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Ongoing Challenges with IBRs Slide Deck 1Documento38 pagineOngoing Challenges with IBRs Slide Deck 1sulemankhalidNessuna valutazione finora
- 2000 Ga Tech PaperDocumento24 pagine2000 Ga Tech PaperAceel FitchNessuna valutazione finora
- Ongoing Challenges with IBRs Slide Deck 2Documento54 pagineOngoing Challenges with IBRs Slide Deck 2sulemankhalidNessuna valutazione finora
- PCP The Impacts of IBR Webinar BrochureDocumento1 paginaPCP The Impacts of IBR Webinar BrochuresulemankhalidNessuna valutazione finora
- Recs, TRCS, Green Tags, Rocs, EtcDocumento17 pagineRecs, TRCS, Green Tags, Rocs, EtcsulemankhalidNessuna valutazione finora
- Control and Derating of A PV Inverter For Harmonic Compensation in A Smart Distribution SystemDocumento5 pagineControl and Derating of A PV Inverter For Harmonic Compensation in A Smart Distribution SystemsulemankhalidNessuna valutazione finora
- Impacts of Substation Transformer Backfeed at High PV PenetrationsDocumento5 pagineImpacts of Substation Transformer Backfeed at High PV PenetrationssulemankhalidNessuna valutazione finora
- PDTools - A Toolbox of Partial Discharge (PD) Signal Analysis For Transformer Condition AssessmentDocumento5 paginePDTools - A Toolbox of Partial Discharge (PD) Signal Analysis For Transformer Condition AssessmentsulemankhalidNessuna valutazione finora
- On The Development of Power Transformer Failure Models - An Australian Case StudyDocumento5 pagineOn The Development of Power Transformer Failure Models - An Australian Case StudysulemankhalidNessuna valutazione finora
- A Two-Stage Overload Strategy of Oil-Immersed Transformers Considering Operation RiskDocumento5 pagineA Two-Stage Overload Strategy of Oil-Immersed Transformers Considering Operation RisksulemankhalidNessuna valutazione finora
- Enhancing Distance Relay Security During Power System Stresses - An Apparent Power ApproachDocumento5 pagineEnhancing Distance Relay Security During Power System Stresses - An Apparent Power ApproachsulemankhalidNessuna valutazione finora
- The Colorado RPS StoryDocumento15 pagineThe Colorado RPS StorysulemankhalidNessuna valutazione finora
- Exploring The Role of Demand Shifting in Oligopolistic Electricity MarketsDocumento5 pagineExploring The Role of Demand Shifting in Oligopolistic Electricity MarketssulemankhalidNessuna valutazione finora
- Determining An Optimal Number of Spares For Hydro One 230-115 KV Auto-TransformersDocumento5 pagineDetermining An Optimal Number of Spares For Hydro One 230-115 KV Auto-TransformerssulemankhalidNessuna valutazione finora
- The PUHC Act of 1935Documento14 pagineThe PUHC Act of 1935sulemankhalidNessuna valutazione finora
- Adaptive Transformer Inrush Current Identification Principle Based On Second HarmonicDocumento3 pagineAdaptive Transformer Inrush Current Identification Principle Based On Second HarmonicsulemankhalidNessuna valutazione finora
- A Robust Optimization Based Strategy For Optimal Power System Protection Considering UncertaintiesDocumento5 pagineA Robust Optimization Based Strategy For Optimal Power System Protection Considering UncertaintiessulemankhalidNessuna valutazione finora
- Understanding Differences in Harmonic Restraint and Harmonic Blocking in Transformer Differential ProtectionDocumento19 pagineUnderstanding Differences in Harmonic Restraint and Harmonic Blocking in Transformer Differential ProtectionDeptiranjan MohapatraNessuna valutazione finora
- Introduction To Water Supply SystemsDocumento89 pagineIntroduction To Water Supply Systemssulemankhalid100% (1)
- Fault Analysis: As Per Ansi Standard No - Ansi/Ieeestd141-1986Documento38 pagineFault Analysis: As Per Ansi Standard No - Ansi/Ieeestd141-1986Pooja YadavNessuna valutazione finora
- 6705 CapturingGenerator NS 20160208 Web2Documento11 pagine6705 CapturingGenerator NS 20160208 Web2sulemankhalidNessuna valutazione finora
- Energy Efficiency: Why The Gap?: Dr. Paul KomorDocumento15 pagineEnergy Efficiency: Why The Gap?: Dr. Paul KomorsulemankhalidNessuna valutazione finora
- Transformer 845 Introduction Seminar June 2015Documento35 pagineTransformer 845 Introduction Seminar June 2015sulemankhalidNessuna valutazione finora
- 11Hydro Electric Power Plants: An OverviewDocumento99 pagine11Hydro Electric Power Plants: An Overviewncaliao_1Nessuna valutazione finora
- Energy Efficiency Overview: Technologies, Finances, and PoliciesDocumento33 pagineEnergy Efficiency Overview: Technologies, Finances, and PoliciessulemankhalidNessuna valutazione finora
- Hydropower Practice and Application PDFDocumento332 pagineHydropower Practice and Application PDFbagastcNessuna valutazione finora
- Energy Efficiency Policy: Dr. Paul KomorDocumento21 pagineEnergy Efficiency Policy: Dr. Paul KomorsulemankhalidNessuna valutazione finora
- Renewables AB Electricity Market Fellows Moore ShafferDocumento29 pagineRenewables AB Electricity Market Fellows Moore ShaffersulemankhalidNessuna valutazione finora
- Sustainable Future 12 1Documento59 pagineSustainable Future 12 1sulemankhalidNessuna valutazione finora
- Electrical Area Classification in Coal-Fired Power Plants PDFDocumento23 pagineElectrical Area Classification in Coal-Fired Power Plants PDFsulemankhalidNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Dynamis MaxxDocumento14 pagineDynamis MaxxJas SumNessuna valutazione finora
- Final Et NotesDocumento123 pagineFinal Et NotesyounusmohamadNessuna valutazione finora
- Starting - Rav4 Sxa1Documento19 pagineStarting - Rav4 Sxa1Christian Linares AbreuNessuna valutazione finora
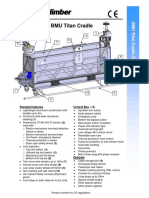
- BMU Titan Cradle: Standard Features Control BoxDocumento2 pagineBMU Titan Cradle: Standard Features Control BoxKashyapNessuna valutazione finora
- Temperature Controlled DC Fan Using OpDocumento24 pagineTemperature Controlled DC Fan Using OpAnwesha pradhan100% (4)
- Heat Equation 1 DDocumento3 pagineHeat Equation 1 Djohndo3Nessuna valutazione finora
- Submissions - MMC Safety Program, MBFHI & Breastfeeding in The Workplace Orientation - Learning CheckDocumento1 paginaSubmissions - MMC Safety Program, MBFHI & Breastfeeding in The Workplace Orientation - Learning CheckAbis JohnNessuna valutazione finora
- GreenTech EC Technology enDocumento44 pagineGreenTech EC Technology enspscribd1Nessuna valutazione finora
- Inphorm Online: Click Here To AccessDocumento10 pagineInphorm Online: Click Here To AccessconimecNessuna valutazione finora
- Presentation P631+P632+P633+P634Documento59 paginePresentation P631+P632+P633+P634Leister Carneiro TheodoroNessuna valutazione finora
- Error Codes Special Modes: Yes Yes YesDocumento2 pagineError Codes Special Modes: Yes Yes YesJorge SaavedraNessuna valutazione finora
- Airframe Fuel SystemDocumento30 pagineAirframe Fuel SystemLuis GarciaNessuna valutazione finora
- Elution and Carbon Reactivation BasicsDocumento19 pagineElution and Carbon Reactivation BasicsdiegovergaraNessuna valutazione finora
- Electric Vehicle ChargingDocumento60 pagineElectric Vehicle Chargingvinod 7100% (1)
- CAT079 SwitchDocumento232 pagineCAT079 SwitchDan688100% (1)
- PPR Techincal Data SheetDocumento0 paginePPR Techincal Data SheetKrish ChennaiNessuna valutazione finora
- Model TM-T24J TABLE TOP STEAM STERILIZER INSTRUNCTION MANUAL OF OPERATIONDocumento9 pagineModel TM-T24J TABLE TOP STEAM STERILIZER INSTRUNCTION MANUAL OF OPERATIONhuguito320% (1)
- Toshiba 4550: Service Manual Service HandbookDocumento499 pagineToshiba 4550: Service Manual Service Handbookصلاح هزاعNessuna valutazione finora
- Ahemdabad Company Details (AutoRecovered) (AutoRecovered)Documento261 pagineAhemdabad Company Details (AutoRecovered) (AutoRecovered)protonelectricals1208Nessuna valutazione finora
- Unit 4: Fault Analysis EssentialsDocumento9 pagineUnit 4: Fault Analysis EssentialsBALAKRISHNAN100% (2)
- ADIABATIC FLOW IN A DUCT WITH FRICTION (FANNO FLOWDocumento30 pagineADIABATIC FLOW IN A DUCT WITH FRICTION (FANNO FLOWHamza AshrafNessuna valutazione finora
- Ref - No.IM-B086-01: Operating Instructions Rechargeable ShaverDocumento8 pagineRef - No.IM-B086-01: Operating Instructions Rechargeable ShaverrootermxNessuna valutazione finora
- Lecture 30 - Enamine and Iminium OrganocatalysisDocumento22 pagineLecture 30 - Enamine and Iminium OrganocatalysisDênisPiresdeLimaNessuna valutazione finora
- 7.MMCR JuliDocumento5.281 pagine7.MMCR JuliAngga StwnNessuna valutazione finora
- Spe 131758 Ms - GL and EspDocumento11 pagineSpe 131758 Ms - GL and EspSamuel VmNessuna valutazione finora
- Overview of The Kuraymat Solar Power Plant enDocumento4 pagineOverview of The Kuraymat Solar Power Plant enKhaled TahaNessuna valutazione finora
- TestDocumento22 pagineTestAbdul WaheedNessuna valutazione finora
- HMCDocumento8 pagineHMCmahmoud nafieNessuna valutazione finora
- Igcse: Definitions & Concepts of ElectricityDocumento4 pagineIgcse: Definitions & Concepts of ElectricityMusdq ChowdhuryNessuna valutazione finora
- Thermal Protector For Motor: Ballast For Fluorescent and Temperature Sensing ControlsDocumento1 paginaThermal Protector For Motor: Ballast For Fluorescent and Temperature Sensing ControlsPasilius OktavianusNessuna valutazione finora