Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Implementing and iterating Java collectionsDocumento1 paginaImplementing and iterating Java collectionskasimNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Data StructuresDocumento12 pagineData StructureswalneNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- 9-Hashing SchemesDocumento23 pagine9-Hashing SchemesDIVYANSHUNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- DSP Exp 7Documento9 pagineDSP Exp 7eishasingh369Nessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Data Structures and Algorithms Cheat SheetDocumento45 pagineData Structures and Algorithms Cheat SheetSudhanshu RanjanNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- DSTR Topic05 RecursionDocumento15 pagineDSTR Topic05 RecursionCliciseNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Prep Doc Coding AlgoDocumento100 paginePrep Doc Coding AlgoYash KhandelwalNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Simplex MethodDocumento6 pagineSimplex MethodKen SendaydiegoNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- N-QUEEN PROBLEM SOLVED USING BACKTRACKINGDocumento18 pagineN-QUEEN PROBLEM SOLVED USING BACKTRACKINGAhsan BaigNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- Prefix Tree and String MatchingDocumento18 paginePrefix Tree and String MatchingShobhit RajNessuna valutazione finora
- Chapter 4 AlgorthmsDocumento60 pagineChapter 4 AlgorthmsVilayat AliNessuna valutazione finora
- Os DiskDocumento27 pagineOs DiskASHNA CHOUDHARY 20BCI0158Nessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- LAB1Documento12 pagineLAB1ngokhoa26102004Nessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Transportation Problem SolutionDocumento16 pagineTransportation Problem SolutionMaryam LaraibNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Graph AlgorithmDocumento14 pagineGraph AlgorithmHafidz Jazuli LuthfiNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Skip List: ADS Skip List Iii I.T - I SemDocumento6 pagineSkip List: ADS Skip List Iii I.T - I SemRaviKumarNessuna valutazione finora
- Data Structures With CDocumento162 pagineData Structures With CBilal BhattiNessuna valutazione finora
- CS20Documento4 pagineCS20Balu C Shekar0% (1)
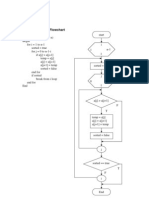
- Bubble Sort Pseudocode and FlowchartDocumento2 pagineBubble Sort Pseudocode and Flowchartblackcoder4150% (8)
- Learning Module: Algorithm and Complexity (AL101)Documento18 pagineLearning Module: Algorithm and Complexity (AL101)Ruben San FelipeNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Merge Sort: A Brief Look at One of The Earlier Sorting AlgorithmsDocumento23 pagineMerge Sort: A Brief Look at One of The Earlier Sorting AlgorithmsJether Pactol TeroNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Asses Ement 3Documento32 pagineAsses Ement 3NikhilNessuna valutazione finora
- Hanoi TowersDocumento33 pagineHanoi TowersChandan Sharma100% (1)
- GeorgiaTech CS-6515: Graduate Algorithms: Divide-And-Conquer Flashcards by Yang Hu - BrainscapeDocumento8 pagineGeorgiaTech CS-6515: Graduate Algorithms: Divide-And-Conquer Flashcards by Yang Hu - BrainscapeJan_SuNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Don’t Worry About Building a Neural Network from ScratchDocumento14 pagineDon’t Worry About Building a Neural Network from ScratchGautam KumarNessuna valutazione finora
- ESO207 - Assignment 1 Tanush Kumar (201043) Kartikeya Raghuvanshi (200494)Documento6 pagineESO207 - Assignment 1 Tanush Kumar (201043) Kartikeya Raghuvanshi (200494)TanushNessuna valutazione finora
- Data Structure Intro and AlgoDocumento11 pagineData Structure Intro and AlgoLal babu Lal babuNessuna valutazione finora
- Chapter 2 True FalseDocumento8 pagineChapter 2 True FalseMotseilekgoaNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- VALMONTEDocumento3 pagineVALMONTEXijhyve ManganaNessuna valutazione finora
- Subject: Data Structures Topic: QueueDocumento32 pagineSubject: Data Structures Topic: QueueRahna RwpcNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)