Potrebbero piacerti anche
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesDa EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNessuna valutazione finora
- Applications of Power Electronics in Railway Systems PDFDocumento10 pagineApplications of Power Electronics in Railway Systems PDFnpfhNessuna valutazione finora
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingDa EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingValutazione: 4.5 su 5 stelle4.5/5 (2)
- Energy Storage Devices in Railway SystemsDocumento5 pagineEnergy Storage Devices in Railway Systemsnbashir786Nessuna valutazione finora
- Chapter 1Documento15 pagineChapter 1webhareggebru06Nessuna valutazione finora
- Application of Fuzzy Logic For Loss Reduction in A Transmission NetworkDocumento22 pagineApplication of Fuzzy Logic For Loss Reduction in A Transmission NetworkOhanyelu Okeoma DanielNessuna valutazione finora
- Supercapacitors Use D As An Energy Source To Drive The Short Urban Electric VehiclesDocumento6 pagineSupercapacitors Use D As An Energy Source To Drive The Short Urban Electric VehiclesEdu Daryl MacerenNessuna valutazione finora
- HVDC Converter For RailwaysDocumento10 pagineHVDC Converter For RailwaysDeepak GehlotNessuna valutazione finora
- AbstractDocumento20 pagineAbstractVijayaa AlmelkarNessuna valutazione finora
- Electrical Vehicle Charging by Wireless Power Transfer Using High-Power Three Level DC-DC ConvertersDocumento5 pagineElectrical Vehicle Charging by Wireless Power Transfer Using High-Power Three Level DC-DC ConvertersijeteeditorNessuna valutazione finora
- Aspects of Catenary Free Operation of DC TractionDocumento5 pagineAspects of Catenary Free Operation of DC TractionLe Professeur100% (1)
- Applied Sciences: Decision Optimization For Power Grid Operating Conditions With High-And Low-Voltage Parallel LoopsDocumento18 pagineApplied Sciences: Decision Optimization For Power Grid Operating Conditions With High-And Low-Voltage Parallel Loopsyesar laftaNessuna valutazione finora
- Jemal ProposalDocumento18 pagineJemal ProposalJemal BeyanNessuna valutazione finora
- Electric TractionDocumento52 pagineElectric Tractionranjit mallickNessuna valutazione finora
- Traction Power Systems For Electrified Railways EvDocumento19 pagineTraction Power Systems For Electrified Railways EvUdaraNessuna valutazione finora
- Electric TrainsDocumento35 pagineElectric TrainsShefian Md Dom100% (2)
- Electric Traction Systems: DC, AC and CompositeDocumento4 pagineElectric Traction Systems: DC, AC and Compositemaheswari M100% (1)
- TCSC For Protection PDFDocumento9 pagineTCSC For Protection PDFpragatinareshNessuna valutazione finora
- Under The Guidance Of:-Dr - Imran Khan (Dept. of EE) Presented By: - Amit Kumar Roll No. - 1605320659 CourseDocumento26 pagineUnder The Guidance Of:-Dr - Imran Khan (Dept. of EE) Presented By: - Amit Kumar Roll No. - 1605320659 CourseGee KNessuna valutazione finora
- A Method For Power Conditioning With Harmonic Reduction in MicrogridsDocumento6 pagineA Method For Power Conditioning With Harmonic Reduction in MicrogridsINder DǝǝpNessuna valutazione finora
- Traction TransformationDocumento7 pagineTraction TransformationdabrevipulNessuna valutazione finora
- Electric Traction Systems ExplainedDocumento3 pagineElectric Traction Systems ExplainedVyaghri KotturiNessuna valutazione finora
- Energies: Integration of Photovoltaic Plants and Supercapacitors in Tramway Power SystemsDocumento14 pagineEnergies: Integration of Photovoltaic Plants and Supercapacitors in Tramway Power SystemsJorge GuerreroNessuna valutazione finora
- Coordinating Ultracapacitors and Batteries for Electric VehiclesDocumento6 pagineCoordinating Ultracapacitors and Batteries for Electric VehiclesrameshemandiNessuna valutazione finora
- LocomotivesDocumento11 pagineLocomotivessimbairvine23Nessuna valutazione finora
- 7 Trans SystemDocumento7 pagine7 Trans SystemAhmedNessuna valutazione finora
- Electric TractionDocumento21 pagineElectric Tractionnagarjunareddy100% (1)
- BeeDocumento201 pagineBeegopaltry100% (2)
- Energies 12 01092 PDFDocumento25 pagineEnergies 12 01092 PDFjolamo1122916Nessuna valutazione finora
- Use of Converters for Feeding All AC Railways More EfficientlyDocumento34 pagineUse of Converters for Feeding All AC Railways More EfficientlymanualvazNessuna valutazione finora
- IGTE2014 Busductreview Formatted 9aug FinialDocumento11 pagineIGTE2014 Busductreview Formatted 9aug Finialtechspv24Nessuna valutazione finora
- Fan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEDocumento13 pagineFan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEMarcelo Vinicius de PaulaNessuna valutazione finora
- Multiport Converter in Electrical Vehicles-A ReviewDocumento5 pagineMultiport Converter in Electrical Vehicles-A ReviewJASH MATHEWNessuna valutazione finora
- Effect of Capacitor Compensator On A Transmission LineDocumento16 pagineEffect of Capacitor Compensator On A Transmission LineOhanyelu Okeoma DanielNessuna valutazione finora
- (Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link CapacitanceDocumento12 pagine(Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link Capacitancesk.karimeeeNessuna valutazione finora
- Position-Sensorless Method For Electric Braking Commutation of Brushless DC MachinesDocumento13 paginePosition-Sensorless Method For Electric Braking Commutation of Brushless DC MachinesMalikAlrahabiNessuna valutazione finora
- ThesisDocumento76 pagineThesisSayantan Sinha100% (1)
- Regenerative BrakingDocumento160 pagineRegenerative Brakingcharlesc5746Nessuna valutazione finora
- Electrical Power and Energy SystemsDocumento10 pagineElectrical Power and Energy Systemsalper koçerNessuna valutazione finora
- Seminar Report on Traction DrivesDocumento15 pagineSeminar Report on Traction DrivesDev KumarNessuna valutazione finora
- Practical Control of Switching Overvoltages by Switch-Sync Controller PDFDocumento6 paginePractical Control of Switching Overvoltages by Switch-Sync Controller PDFkaushikray06Nessuna valutazione finora
- Under The Guidance Of: Prof. Ajoya Ku Pradhan HOD Dept. of Electrical EngineeringDocumento27 pagineUnder The Guidance Of: Prof. Ajoya Ku Pradhan HOD Dept. of Electrical Engineeringishfaq222100% (1)
- Static Model of A 2x25kV AC Traction SystemDocumento6 pagineStatic Model of A 2x25kV AC Traction SystemnpfhNessuna valutazione finora
- Fianl Hardcopy ReadyDocumento8 pagineFianl Hardcopy ReadyKiran LandgeNessuna valutazione finora
- Energies: Real-Time Control Based On A CAN-Bus of Hybrid Electrical SystemsDocumento14 pagineEnergies: Real-Time Control Based On A CAN-Bus of Hybrid Electrical SystemsHuu Vien AutoNessuna valutazione finora
- TPSDocumento2 pagineTPSFreddie MendezNessuna valutazione finora
- Facts WhiteDocumento5 pagineFacts WhiteAnurag BansalNessuna valutazione finora
- Simulation of Energy Efficiency Improvements On Commuter Railways PDFDocumento9 pagineSimulation of Energy Efficiency Improvements On Commuter Railways PDF曾乙申Nessuna valutazione finora
- Voltage Controllable Power Factor Corrector Based Inductive Coupling Power Transfer SystemDocumento56 pagineVoltage Controllable Power Factor Corrector Based Inductive Coupling Power Transfer SystemMummadi Sai SandeepNessuna valutazione finora
- Railway electrification systems and traction transformationDocumento7 pagineRailway electrification systems and traction transformationAry PutraNessuna valutazione finora
- Transient Stability Improvement of SMIB With Unified Power Flow ControllerDocumento78 pagineTransient Stability Improvement of SMIB With Unified Power Flow ControllerRagesh OdungattuNessuna valutazione finora
- HVDC Feeder Solution For Electric Railways: L. Abrahamsson, T. Kjellqvist, S. OstlundDocumento10 pagineHVDC Feeder Solution For Electric Railways: L. Abrahamsson, T. Kjellqvist, S. OstlundAhmad TaheriNessuna valutazione finora
- Load Flow in Power SystemDocumento60 pagineLoad Flow in Power SystemShantasree RoyNessuna valutazione finora
- Ee2303 Transmission and DistributionDocumento16 pagineEe2303 Transmission and Distributionfpttmm100% (2)
- Subject Code/name: EE 2306-Flexible AC Transmission Systems: Facts 8 Kce/Eee/Qb/Ivyr/FactsDocumento26 pagineSubject Code/name: EE 2306-Flexible AC Transmission Systems: Facts 8 Kce/Eee/Qb/Ivyr/FactssivakumarsarvananNessuna valutazione finora
- Energy Saving and Environmental Measures in Railway TechnologiesDocumento6 pagineEnergy Saving and Environmental Measures in Railway TechnologiesDawit Getachew MelsselNessuna valutazione finora
- 2 - UtilisationDocumento13 pagine2 - UtilisationAditya PaulNessuna valutazione finora
- Sustainability 12 03134 v2Documento20 pagineSustainability 12 03134 v2Muhd IrfanNessuna valutazione finora
- A 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargeDocumento16 pagineA 3-kW Wireless Power Transfer System For Sightseeing Car Supercapacitor ChargePRAMOD PATIDARNessuna valutazione finora
- UNIT-1 Introduction To Facts: Need For Transmission Networks InterconnectionsDocumento13 pagineUNIT-1 Introduction To Facts: Need For Transmission Networks InterconnectionsChetan KotwalNessuna valutazione finora
- Three Day National Workshop With Hands-On Session in Signal and Image Processing Practice To ResearchDocumento2 pagineThree Day National Workshop With Hands-On Session in Signal and Image Processing Practice To ResearchDilip TheLipNessuna valutazione finora
- Intel® Desktop Board DG31PR Product Guide: Order Number: D99182-001Documento74 pagineIntel® Desktop Board DG31PR Product Guide: Order Number: D99182-001Richard MedinaNessuna valutazione finora
- Diploma EEE III SemDocumento22 pagineDiploma EEE III SemDilip TheLipNessuna valutazione finora
- Mphil PHD 2016.PDF SPMVVDocumento14 pagineMphil PHD 2016.PDF SPMVVDilip TheLipNessuna valutazione finora
- Current TargetDocumento1 paginaCurrent TargetDilip TheLipNessuna valutazione finora
- IGI30Documento1 paginaIGI30Dilip TheLipNessuna valutazione finora
- 2016-17 Academic Inspection ReportDocumento1 pagina2016-17 Academic Inspection ReportDilip TheLipNessuna valutazione finora
- Lecture NetworkingDocumento262 pagineLecture NetworkingDilip TheLipNessuna valutazione finora
- ProformarDocumento3 pagineProformarDilip TheLipNessuna valutazione finora
- Report on visit to 132 kV transmission substationDocumento2 pagineReport on visit to 132 kV transmission substationDilip TheLipNessuna valutazione finora
- General Tesla Coil Construction PlansDocumento7 pagineGeneral Tesla Coil Construction PlansPrateekNessuna valutazione finora
- My Inventions - The Autobiography of Nikola Tesla PDFDocumento12 pagineMy Inventions - The Autobiography of Nikola Tesla PDFDilip TheLipNessuna valutazione finora
- RVNL Job Interview for EngineersDocumento2 pagineRVNL Job Interview for EngineersAakash MazumderNessuna valutazione finora
- FDM User IDs ListDocumento1 paginaFDM User IDs ListDilip TheLipNessuna valutazione finora
- Deadlock ProgramDocumento5 pagineDeadlock Programjsanandkumar22Nessuna valutazione finora
- Lakshya List of Papers Selected For Presentation From Dept. of EeeDocumento7 pagineLakshya List of Papers Selected For Presentation From Dept. of EeeDilip TheLipNessuna valutazione finora
- JNTUA R&D Gudelines For PH.D M.phil Thesis Submitted..Pdf - 353699Documento3 pagineJNTUA R&D Gudelines For PH.D M.phil Thesis Submitted..Pdf - 353699Arun KumarNessuna valutazione finora
- Required PicsDocumento2 pagineRequired PicsDilip TheLipNessuna valutazione finora
- October 2015Documento4 pagineOctober 2015Dilip TheLipNessuna valutazione finora
- Roles and RespnsibilitiesDocumento2 pagineRoles and RespnsibilitiesDilip TheLipNessuna valutazione finora
- SpeechDocumento1 paginaSpeechDilip TheLipNessuna valutazione finora
- InfoDocumento1 paginaInfoDilip TheLipNessuna valutazione finora
- C Language Unit-1Documento46 pagineC Language Unit-1Dilip TheLipNessuna valutazione finora
- Microsoft Word - Interview Questions MCSEDocumento69 pagineMicrosoft Word - Interview Questions MCSEArunaigiri NmNessuna valutazione finora
- Engineering SciencesDocumento3 pagineEngineering SciencesDilip TheLipNessuna valutazione finora
- Item Cost Pen 5 Box 20 Pencil 2 #N/A Box 20 #N/A Book 25 #N/A Eraser 1 #N/A Sharpner 2 #N/A #N/A #N/A Sharpner 2Documento1 paginaItem Cost Pen 5 Box 20 Pencil 2 #N/A Box 20 #N/A Book 25 #N/A Eraser 1 #N/A Sharpner 2 #N/A #N/A #N/A Sharpner 2Dilip TheLipNessuna valutazione finora
- ProverbsDocumento2 pagineProverbsDilip TheLipNessuna valutazione finora
- 1Documento1 pagina1Dilip TheLipNessuna valutazione finora
- Bankerr ResultDocumento3 pagineBankerr ResultDilip TheLipNessuna valutazione finora
- EB Welding of SS405 To GR70Documento5 pagineEB Welding of SS405 To GR70s_m_taheriNessuna valutazione finora
- ECU Mount-On-Engine Vibration StudyDocumento6 pagineECU Mount-On-Engine Vibration StudyElroy LeeNessuna valutazione finora
- Greenhouse Effect-QuizDocumento4 pagineGreenhouse Effect-Quizlindsay tanNessuna valutazione finora
- United States Patent (10) Patent No.: US 8,106,570 B2Documento20 pagineUnited States Patent (10) Patent No.: US 8,106,570 B2zahra sdeghiniaNessuna valutazione finora
- Ethics IndividualDocumento3 pagineEthics IndividualJustin JJNessuna valutazione finora
- DVC6200Documento4 pagineDVC6200Jesus BolivarNessuna valutazione finora
- Volkswagen 2.0L TDI Common Rail Engine Service TrainingDocumento90 pagineVolkswagen 2.0L TDI Common Rail Engine Service TrainingАлла Харютина100% (1)
- Ed Current DynamometerDocumento3 pagineEd Current DynamometerOM MUNGELWARNessuna valutazione finora
- Amcor 2016Documento69 pagineAmcor 2016Romulo AlvesNessuna valutazione finora
- Electrical Properties of Materials Mod-1Documento18 pagineElectrical Properties of Materials Mod-1Darshan rajNessuna valutazione finora
- O359h MilDocumento90 pagineO359h MilNisar AhmedNessuna valutazione finora
- 937 Letter AttchamentDocumento8 pagine937 Letter AttchamentNeeta RautelaNessuna valutazione finora
- Esite Bauer Poseidon Edition VE 300 850 Hengitysilmakompressori enDocumento4 pagineEsite Bauer Poseidon Edition VE 300 850 Hengitysilmakompressori enrolandoNessuna valutazione finora
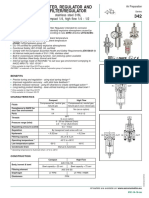
- Numatics Series 342Documento6 pagineNumatics Series 342Jebran FarazNessuna valutazione finora
- More power in less space with SMA SUNNY CENTRAL UPDocumento4 pagineMore power in less space with SMA SUNNY CENTRAL UPBrahadeesh Perinkolam MuraliNessuna valutazione finora
- PLF-76T Service ManualDocumento40 paginePLF-76T Service Manualapi-3711045100% (1)
- DBB ValveDocumento6 pagineDBB ValveshyamNessuna valutazione finora
- Sub Sea Hot Stab (Sub Sea High Pressure Quick Disconnect)Documento2 pagineSub Sea Hot Stab (Sub Sea High Pressure Quick Disconnect)estelauNessuna valutazione finora
- Turbocharged Engines PDFDocumento72 pagineTurbocharged Engines PDFVeler VelericNessuna valutazione finora
- Types of Supports For Vessels - Chemical Engineering WorldDocumento10 pagineTypes of Supports For Vessels - Chemical Engineering WorldAdityaNessuna valutazione finora
- Folio SainsDocumento15 pagineFolio SainsMohammad Afifi Rohman80% (5)
- Pipe Sizes and Flow Rates for Air Flush DrillingDocumento14 paginePipe Sizes and Flow Rates for Air Flush DrillingzapspazNessuna valutazione finora
- KRYPTOSPHERE TechnologyDocumento20 pagineKRYPTOSPHERE TechnologySoniale Sánchez GómezNessuna valutazione finora
- TERAO Presentation August 2022Documento48 pagineTERAO Presentation August 2022LuatNguyenNessuna valutazione finora
- TDFC Global Engineering Solutions CompanyDocumento189 pagineTDFC Global Engineering Solutions CompanyplanningNessuna valutazione finora
- Deepwater Horizon: Lessons in ProbabilitiesDocumento15 pagineDeepwater Horizon: Lessons in ProbabilitiesZaman HaiderNessuna valutazione finora
- B23 B24 User Manual PDFDocumento168 pagineB23 B24 User Manual PDFAurel BodenmannNessuna valutazione finora
- Saudi Aramco Success Story (A4)Documento4 pagineSaudi Aramco Success Story (A4)raghu12421100% (1)
- Introduction To Pressure TransducersDocumento2 pagineIntroduction To Pressure TransducersTEUKUNessuna valutazione finora
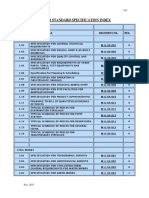
- Water Standard Specification Index As On Dec 2015Documento10 pagineWater Standard Specification Index As On Dec 2015afp15060% (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDa EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionValutazione: 4.5 su 5 stelle4.5/5 (542)
- 8051 Microcontroller: An Applications Based IntroductionDa Everand8051 Microcontroller: An Applications Based IntroductionValutazione: 5 su 5 stelle5/5 (6)
- Understanding Automotive Electronics: An Engineering PerspectiveDa EverandUnderstanding Automotive Electronics: An Engineering PerspectiveValutazione: 3.5 su 5 stelle3.5/5 (16)
- Build Your Own Electric Vehicle, Third EditionDa EverandBuild Your Own Electric Vehicle, Third EditionValutazione: 4.5 su 5 stelle4.5/5 (3)
- Beginner's Guide to Reading Schematics, Third EditionDa EverandBeginner's Guide to Reading Schematics, Third EditionNessuna valutazione finora
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsDa EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsValutazione: 4 su 5 stelle4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Da EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Valutazione: 5 su 5 stelle5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDa EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionValutazione: 4 su 5 stelle4/5 (331)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersDa Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersValutazione: 5 su 5 stelle5/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsDa EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsValutazione: 5 su 5 stelle5/5 (2)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemDa EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNessuna valutazione finora
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Da EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Valutazione: 4.5 su 5 stelle4.5/5 (2)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowDa EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNessuna valutazione finora
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionNessuna valutazione finora
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesDa EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesValutazione: 5 su 5 stelle5/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesDa EverandThe Rare Metals War: the dark side of clean energy and digital technologiesValutazione: 5 su 5 stelle5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDa EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeValutazione: 5 su 5 stelle5/5 (8)
- Operational Amplifier Circuits: Analysis and DesignDa EverandOperational Amplifier Circuits: Analysis and DesignValutazione: 4.5 su 5 stelle4.5/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingDa EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingValutazione: 4 su 5 stelle4/5 (1)
- Current Interruption Transients CalculationDa EverandCurrent Interruption Transients CalculationValutazione: 4 su 5 stelle4/5 (1)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsDa EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsValutazione: 5 su 5 stelle5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinDa EverandThe Graphene Revolution: The Weird Science of the Ultra-thinValutazione: 4.5 su 5 stelle4.5/5 (4)