Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- VBCarCare PDFDocumento24 pagineVBCarCare PDFbeesahNessuna valutazione finora
- Arp6290 2023Documento68 pagineArp6290 2023Joanne WNessuna valutazione finora
- Introduction To Logic Synthesis Using Verilog HDLDocumento84 pagineIntroduction To Logic Synthesis Using Verilog HDLritesh_necNessuna valutazione finora
- New Ccba Sample Questions PDFDocumento2 pagineNew Ccba Sample Questions PDFcvictoriaNessuna valutazione finora
- Advanced Product Quality Planning: Why PlanDocumento29 pagineAdvanced Product Quality Planning: Why PlanSudhagarNessuna valutazione finora
- Embedded Development Handbook PDFDocumento254 pagineEmbedded Development Handbook PDFDr.Evelyn Brindha 1956Nessuna valutazione finora
- Neural EngineeringDocumento377 pagineNeural Engineeringbeesah100% (1)
- Out Patient ClaimDocumento2 pagineOut Patient ClaimbeesahNessuna valutazione finora
- BJT Common Emitter Characteristics: Experiment 6Documento5 pagineBJT Common Emitter Characteristics: Experiment 6beesahNessuna valutazione finora
- 74LS42 PDFDocumento3 pagine74LS42 PDFbeesahNessuna valutazione finora
- Cc3717 Sliding Mode Control For A Class of Simo Under-Actuated SytemsDocumento18 pagineCc3717 Sliding Mode Control For A Class of Simo Under-Actuated SytemsbeesahNessuna valutazione finora
- Grasser Darrigo Colombi Rufer Mic 01Documento6 pagineGrasser Darrigo Colombi Rufer Mic 01mahmudahmadiNessuna valutazione finora
- 2-Lecture Notes Lesson3 3Documento10 pagine2-Lecture Notes Lesson3 3kstu1112Nessuna valutazione finora
- Panel Mount Optical Encoders: HEDS-5700 SeriesDocumento3 paginePanel Mount Optical Encoders: HEDS-5700 SeriesbeesahNessuna valutazione finora
- Cc3717 Sliding Mode Control For A Class of Simo Under-Actuated SytemsDocumento18 pagineCc3717 Sliding Mode Control For A Class of Simo Under-Actuated SytemsbeesahNessuna valutazione finora
- AAPT LabVIEWDocumento10 pagineAAPT LabVIEWbeesahNessuna valutazione finora
- QURHRUVTZ3NLODVkQ25ibWVVYTJuRzRmNjlFb29LamoyT3gxaE9nclpqUmN3ZTlXV1hyd1VoOF9rbU9xek9jUl83OWVRNXlOVVFLR1VaVmwxTU4wTmJNMVNuMW5qNXV2UkhLYlEyU3VoeFc2Yk9tTUdMUU5wT3RTeFBDOUQ2X3pKMXh6T29fbXI1MFc=Documento53 pagineQURHRUVTZ3NLODVkQ25ibWVVYTJuRzRmNjlFb29LamoyT3gxaE9nclpqUmN3ZTlXV1hyd1VoOF9rbU9xek9jUl83OWVRNXlOVVFLR1VaVmwxTU4wTmJNMVNuMW5qNXV2UkhLYlEyU3VoeFc2Yk9tTUdMUU5wT3RTeFBDOUQ2X3pKMXh6T29fbXI1MFc=darkknight1432Nessuna valutazione finora
- DMM PPTDocumento17 pagineDMM PPTShah Najmus SaqibNessuna valutazione finora
- English GuruDocumento149 pagineEnglish GurubeesahNessuna valutazione finora
- Spartan3E FPGA User GuideDocumento14 pagineSpartan3E FPGA User GuideAbdelbacet_MHAMDINessuna valutazione finora
- 108613Documento8 pagine108613beesahNessuna valutazione finora
- Present Perfect or Past Simple PDFDocumento2 paginePresent Perfect or Past Simple PDFkenanerikliNessuna valutazione finora
- Fuzzy Logic: Shane Warren Brittney BallardDocumento15 pagineFuzzy Logic: Shane Warren Brittney BallardbeesahNessuna valutazione finora
- Lecture1 PDFDocumento11 pagineLecture1 PDFEjaz AhmadNessuna valutazione finora
- Hybrid Intelligent SystemsDocumento39 pagineHybrid Intelligent SystemsbeesahNessuna valutazione finora
- Lecture1 PDFDocumento11 pagineLecture1 PDFEjaz AhmadNessuna valutazione finora
- Assignment 3Documento4 pagineAssignment 3beesahNessuna valutazione finora
- Assignment 1Documento3 pagineAssignment 1beesahNessuna valutazione finora
- Introduction To LabVIEW CompleteDocumento122 pagineIntroduction To LabVIEW CompleteAlejandro ArgaezNessuna valutazione finora
- Sat Vocab PDFDocumento100 pagineSat Vocab PDFIntekhab AlamNessuna valutazione finora
- Best Options For Image Processing: Cyclone® Iii FpgasDocumento2 pagineBest Options For Image Processing: Cyclone® Iii FpgasbeesahNessuna valutazione finora
- Assignment 2Documento4 pagineAssignment 2beesahNessuna valutazione finora
- Computer Science Unit 2 DTDocumento13 pagineComputer Science Unit 2 DTKenya LevyNessuna valutazione finora
- Analisis Sentimen Terhadap Aplikasi Ruangguru MengDocumento10 pagineAnalisis Sentimen Terhadap Aplikasi Ruangguru MengKHAIRUN NISANessuna valutazione finora
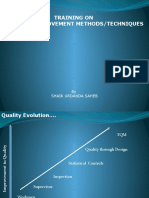
- Training On Quality Improvement Methods/Techniques: by Shaik Urdanda SahebDocumento14 pagineTraining On Quality Improvement Methods/Techniques: by Shaik Urdanda SahebUrdanNessuna valutazione finora
- Technologies of AI: Professor Ravee Choudhury 3 May 2019Documento23 pagineTechnologies of AI: Professor Ravee Choudhury 3 May 2019RakeshNessuna valutazione finora
- Sysmod Sysml 1.3 Reference Card Weilkiens PDFDocumento4 pagineSysmod Sysml 1.3 Reference Card Weilkiens PDFHerold S. SipailNessuna valutazione finora
- Robust Lane Detection From Continuous Driving Scenes Using Deep Neural NetworksDocumento15 pagineRobust Lane Detection From Continuous Driving Scenes Using Deep Neural NetworksJörg ChamorroNessuna valutazione finora
- Satellite Image Segmentation With Convolutional Neural Networks (CNN)Documento4 pagineSatellite Image Segmentation With Convolutional Neural Networks (CNN)Mattia Martinelli100% (1)
- Dumpstate BoardDocumento2 pagineDumpstate BoardAvaz SharifboevNessuna valutazione finora
- Project 2 Building Chatbot For Dianogtistic CenterDocumento10 pagineProject 2 Building Chatbot For Dianogtistic CenterNiriNessuna valutazione finora
- Unit 5 - Week 4: Assignment 4Documento4 pagineUnit 5 - Week 4: Assignment 4Raushan KashyapNessuna valutazione finora
- Jeppesen Crew Pairing: Optimize Your Crew Planning For Increased Productivity, Safety and Operational StabilityDocumento2 pagineJeppesen Crew Pairing: Optimize Your Crew Planning For Increased Productivity, Safety and Operational StabilityZhiyong RuanNessuna valutazione finora
- Object-Oriented Analysis and Design: Lecture 1: Best Practices of Software EngineeringDocumento49 pagineObject-Oriented Analysis and Design: Lecture 1: Best Practices of Software Engineeringho0ng000c0minhNessuna valutazione finora
- Question Bank DFTS: BE 4/4 ECE II Semester Elective II Unit IDocumento4 pagineQuestion Bank DFTS: BE 4/4 ECE II Semester Elective II Unit IAbdul Hadi Abdul RawoofNessuna valutazione finora
- Introducing The Rational Unified ProcessDocumento30 pagineIntroducing The Rational Unified ProcessAnonymous 0HpzfbHNessuna valutazione finora
- SQA NOTES Unit 1Documento16 pagineSQA NOTES Unit 1Madala GuruNessuna valutazione finora
- System Development Life Cycle (SDLC)Documento13 pagineSystem Development Life Cycle (SDLC)YamaanNessuna valutazione finora
- About SAP BTPDocumento2 pagineAbout SAP BTPsouvik_c82Nessuna valutazione finora
- Natural Language processing-Regular-HODocumento10 pagineNatural Language processing-Regular-HObhavana2264Nessuna valutazione finora
- Unit 4 - HCIDocumento48 pagineUnit 4 - HCISHAROS INTERNATIONALNessuna valutazione finora
- GE6757-Total Quality Management PDFDocumento17 pagineGE6757-Total Quality Management PDFVikram mNessuna valutazione finora
- Artificial Intelligence 1Documento75 pagineArtificial Intelligence 1Aksheen MalhotraNessuna valutazione finora
- AI PresentationDocumento5 pagineAI PresentationMurugappan AnnamalaiNessuna valutazione finora
- Abu Farha MS-TCN Multi-Stage Temporal Convolutional Network For Action Segmentation CVPR 2019 PaperDocumento10 pagineAbu Farha MS-TCN Multi-Stage Temporal Convolutional Network For Action Segmentation CVPR 2019 PaperLuigy MachacaNessuna valutazione finora
- L.6. Pemodelan MatematisDocumento23 pagineL.6. Pemodelan MatematisNasikhuddin100% (1)
- CAPE Information Technology Unit 2 Trial ExamDocumento11 pagineCAPE Information Technology Unit 2 Trial ExamCandice ThomasNessuna valutazione finora