Potrebbero piacerti anche
- Spark Plug AnalysisDocumento25 pagineSpark Plug AnalysisXa MauNessuna valutazione finora
- Testing DP Systems RemotelyDocumento4 pagineTesting DP Systems RemotelyXa MauNessuna valutazione finora
- Innova P3Documento4 pagineInnova P3Xa MauNessuna valutazione finora
- Innova 2011Documento3 pagineInnova 2011Xa MauNessuna valutazione finora
- Voith Water Tractor ManuelDocumento24 pagineVoith Water Tractor ManuelokandandinNessuna valutazione finora
- 32 - Techop Cross ConnectionsDocumento34 pagine32 - Techop Cross ConnectionsXa MauNessuna valutazione finora
- TECHOP Annual DP Trials and Gap AnalysisDocumento44 pagineTECHOP Annual DP Trials and Gap AnalysissathiaselanpasskerenNessuna valutazione finora
- Testing DP Systems RemotelyDocumento4 pagineTesting DP Systems RemotelyXa MauNessuna valutazione finora
- Innova 2011Documento3 pagineInnova 2011Xa MauNessuna valutazione finora
- Toyota InnovaDocumento2 pagineToyota InnovaXa MauNessuna valutazione finora
- Marine GPS Accuracy Boosted by NASA's Global Positioning SystemDocumento1 paginaMarine GPS Accuracy Boosted by NASA's Global Positioning SystemXa MauNessuna valutazione finora
- Abstract Power FossDocumento1 paginaAbstract Power FossXa MauNessuna valutazione finora
- DP Thought and Practices - Part1Documento4 pagineDP Thought and Practices - Part1Xa MauNessuna valutazione finora
- DP Personnel Guidance For Professional DevelopmentDocumento26 pagineDP Personnel Guidance For Professional DevelopmentXa MauNessuna valutazione finora
- Techop External InterfacesDocumento30 pagineTechop External InterfacesXa MauNessuna valutazione finora
- Power Management Control of Electrical Propulsion SystemDocumento26 paginePower Management Control of Electrical Propulsion Systemdimitaring100% (1)
- High Tech AalbersDocumento12 pagineHigh Tech AalbersXa MauNessuna valutazione finora
- Risk WeingarthDocumento10 pagineRisk WeingarthXa MauNessuna valutazione finora
- Fieldbus Independent I/O Modules 2 DO 230V AC 1.0 A/ Relay 2 CO/Pot. Free 750-517Documento14 pagineFieldbus Independent I/O Modules 2 DO 230V AC 1.0 A/ Relay 2 CO/Pot. Free 750-517Xa MauNessuna valutazione finora
- Abstract Power LauvdalDocumento1 paginaAbstract Power LauvdalXa MauNessuna valutazione finora
- High Tech AalbersDocumento12 pagineHigh Tech AalbersXa MauNessuna valutazione finora
- Fieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Documento14 pagineFieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Xa MauNessuna valutazione finora
- Fieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Documento14 pagineFieldbus Independent I/O Modules 2DO 230V AC 2.0 A/ Relay 2NO 750-512Xa MauNessuna valutazione finora
- Wideband Fusion LBL and Usbl: Construction Survey Positioning SystemsDocumento12 pagineWideband Fusion LBL and Usbl: Construction Survey Positioning SystemsXa MauNessuna valutazione finora
- Alspa C80-35 DatasheetsDocumento344 pagineAlspa C80-35 DatasheetsStanislav Hock100% (1)
- Lat LongDocumento24 pagineLat LongXa MauNessuna valutazione finora
- 10V Isolated Analog Input Module Specs and InstallationDocumento4 pagine10V Isolated Analog Input Module Specs and InstallationXa MauNessuna valutazione finora
- Datasheet: Compatt Flotation CollarDocumento2 pagineDatasheet: Compatt Flotation CollarXa MauNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5783)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Micro Teaching Lesson Plan in ScienceDocumento4 pagineMicro Teaching Lesson Plan in ScienceAB LoveriaNessuna valutazione finora
- Network 18Documento44 pagineNetwork 18Ashok ThakurNessuna valutazione finora
- WozairDocumento4 pagineWozairRajakumar Bajji SubburamanNessuna valutazione finora
- HTP 12 SkodaDocumento3 pagineHTP 12 SkodamihnutzuNessuna valutazione finora
- Premchand Deliverance Download in PDFDocumento4 paginePremchand Deliverance Download in PDFRiya W100% (3)
- Yamaha TT600RE Service ManualDocumento382 pagineYamaha TT600RE Service ManualStefan30393% (14)
- Mibk - TDS PDFDocumento3 pagineMibk - TDS PDFMardianus U. RihiNessuna valutazione finora
- Why Britain Had Christianity EarlyDocumento47 pagineWhy Britain Had Christianity EarlyChris WoodNessuna valutazione finora
- 2003 VW Jetta Wiring DiagramsDocumento123 pagine2003 VW Jetta Wiring DiagramsmikeNessuna valutazione finora
- Complete The Table With The Missing WordsDocumento2 pagineComplete The Table With The Missing WordssoniaNessuna valutazione finora
- GRT9165 Product GuideDocumento23 pagineGRT9165 Product GuideEslamAldenAbdoNessuna valutazione finora
- Operation Manual: Impedance Audiometer AT235hDocumento102 pagineOperation Manual: Impedance Audiometer AT235hmendezoswaldoNessuna valutazione finora
- Ajhgaa English O6Documento28 pagineAjhgaa English O6dhirumeshkumarNessuna valutazione finora
- 13.phase Feeding and Feeding SystemsDocumento21 pagine13.phase Feeding and Feeding SystemsAsfand Ali SheikhNessuna valutazione finora
- JASA 1st Anniversary Issue 2012 PDFDocumento103 pagineJASA 1st Anniversary Issue 2012 PDFSuresh NatarajanNessuna valutazione finora
- #4 Types of Food, Ingredients and Procedures.Documento7 pagine#4 Types of Food, Ingredients and Procedures.Peter GonzálezNessuna valutazione finora
- Tajima Usb Linker User's GuideDocumento35 pagineTajima Usb Linker User's GuideFermin MuñozNessuna valutazione finora
- Soal Big A Tukpd 2011-2012 RevisiDocumento5 pagineSoal Big A Tukpd 2011-2012 RevisiTriana WatiNessuna valutazione finora
- AmadeusDocumento3 pagineAmadeusCleofe Mae Piñero AseñasNessuna valutazione finora
- Winbond Elec W25q128jvfiq c111478Documento75 pagineWinbond Elec W25q128jvfiq c111478Guilherme El KadriNessuna valutazione finora
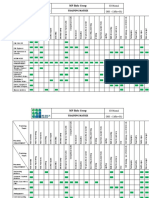
- MP Birla Group: Training MatrixDocumento3 pagineMP Birla Group: Training MatrixAprilia kusumaNessuna valutazione finora
- TTBR 10 January 2024 LDocumento22 pagineTTBR 10 January 2024 Lfossil.tractor0sNessuna valutazione finora
- Satellite Communication Uplink Transmitter Downlink Receiver and TransponderDocumento2 pagineSatellite Communication Uplink Transmitter Downlink Receiver and TransponderTHONTARADYA CHANNELNessuna valutazione finora
- ABRACON's Tuning Fork Crystals and Oscillators for 32.768kHz RTC ApplicationsDocumento13 pagineABRACON's Tuning Fork Crystals and Oscillators for 32.768kHz RTC Applicationsdit277Nessuna valutazione finora
- An Antarasiddhi, The First Independent Treatise: Masahiro InamiDocumento19 pagineAn Antarasiddhi, The First Independent Treatise: Masahiro InamiFengfeifei2018Nessuna valutazione finora
- Kerr Injection WaxesDocumento1 paginaKerr Injection WaxesmarosnaxNessuna valutazione finora
- Exercise - 8.1 NewDocumento24 pagineExercise - 8.1 NewAkriti Sharma 757Nessuna valutazione finora
- DCT PIR insulation technical data sheetDocumento4 pagineDCT PIR insulation technical data sheetHenky MantophaniNessuna valutazione finora
- D5293Documento8 pagineD5293Carlos Olivares ZegarraNessuna valutazione finora