Potrebbero piacerti anche
- TBC LP 084-2016 Op y Mant. Red Acceso y FTTX R. 2 y 4Documento71 pagineTBC LP 084-2016 Op y Mant. Red Acceso y FTTX R. 2 y 4Gri Freddy AsllaniNessuna valutazione finora
- Adicionales - Módulo IVDocumento9 pagineAdicionales - Módulo IVMarcela CosciNessuna valutazione finora
- Factores de Expansión en Demanda de TransporteDocumento13 pagineFactores de Expansión en Demanda de TransporteCarlos RodríguezNessuna valutazione finora
- TFM - Hurtado Silva, P.M.Documento146 pagineTFM - Hurtado Silva, P.M.RAUL CHALLAPANessuna valutazione finora
- Introduccion A Ftth-Punto4Documento9 pagineIntroduccion A Ftth-Punto4Sergiusz SamNessuna valutazione finora
- Informe 6 PDFDocumento9 pagineInforme 6 PDFDanny LeónNessuna valutazione finora
- Quality Alloys en EspañolDocumento17 pagineQuality Alloys en EspañolNattalia Rengifo BelloNessuna valutazione finora
- Extracto Sobre Sociopolis de ArquitectosDocumento4 pagineExtracto Sobre Sociopolis de ArquitectosJavierTellecheaNessuna valutazione finora
- LeikerDocumento2 pagineLeikerSanz PaulimberNessuna valutazione finora
- Memoria de CalculoDocumento145 pagineMemoria de CalculoBallena Farro GustavoNessuna valutazione finora
- Is 03Documento1 paginaIs 03Dickson GonzalesNessuna valutazione finora
- 3.1. - Análisis y Redefinición de Procesos de Negocios.Documento2 pagine3.1. - Análisis y Redefinición de Procesos de Negocios.norma elena lopez vasquezNessuna valutazione finora
- Organizadores GráficosDocumento2 pagineOrganizadores GráficosLina PulgarinNessuna valutazione finora
- Proforma SODIMACDocumento4 pagineProforma SODIMACluisenrique2102Nessuna valutazione finora
- Proyecto Final de Estructuras Metalicas - 201811Documento2 pagineProyecto Final de Estructuras Metalicas - 201811Cristian AlexanderNessuna valutazione finora
- PROYECTO DE IMPLEMENTACION 5S Tarea 2Documento5 paginePROYECTO DE IMPLEMENTACION 5S Tarea 2meyllin floresNessuna valutazione finora
- PDFDocumento107 paginePDFHDMCNessuna valutazione finora
- Informe de PoleasDocumento6 pagineInforme de Poleasgeraldine castro viera100% (1)
- Audio y VídeoDocumento3 pagineAudio y Vídeomam0l1naNessuna valutazione finora
- CIUDADANIADocumento53 pagineCIUDADANIALiz Magaly Diaz RengifoNessuna valutazione finora
- Plan de Negocios de La Empresa Resinas Colores y Compuestos S.A de C.V 1Documento58 paginePlan de Negocios de La Empresa Resinas Colores y Compuestos S.A de C.V 1Jesus Antonio Gonzalez JimenezNessuna valutazione finora
- CIP T4. CustomizaciónDocumento16 pagineCIP T4. CustomizaciónEnfoque Directo UdepNessuna valutazione finora
- Reporte de ObraDocumento9 pagineReporte de Obrasiglinda adriana cortez la fuenteNessuna valutazione finora
- FinaktivaDocumento9 pagineFinaktivaANAID ANAIDNessuna valutazione finora
- Modulo 1-LgeepaDocumento27 pagineModulo 1-Lgeepahugo garciaNessuna valutazione finora
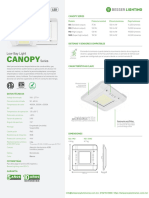
- Ficha Tecnica Canopy LEDDocumento2 pagineFicha Tecnica Canopy LEDjennifer24cvNessuna valutazione finora
- Revisar Entrega de Examen - Semana 11 Sumativa 8 Solemne 2 - ..Documento2 pagineRevisar Entrega de Examen - Semana 11 Sumativa 8 Solemne 2 - ..Mauricio BaezaNessuna valutazione finora
- Reto 3 - Aprendizaje UnadistaDocumento5 pagineReto 3 - Aprendizaje Unadistafredy gonzalez100% (2)
- Programa Sec Ciencias y TecnologiaDocumento14 paginePrograma Sec Ciencias y TecnologiaAhvg Valdes Gómes100% (1)
- 2.1 Procesamiento de Datos y El Computador A Lo InternoDocumento34 pagine2.1 Procesamiento de Datos y El Computador A Lo InternoLuis FernandoNessuna valutazione finora