Potrebbero piacerti anche
- Solution Manual Chemical Process Safety 3rd EditionDocumento698 pagineSolution Manual Chemical Process Safety 3rd EditionAmirul Abu94% (308)
- Final Year Design Lectures - Mar 2018: List of AttachmentsDocumento9 pagineFinal Year Design Lectures - Mar 2018: List of AttachmentsjayaprinaNessuna valutazione finora
- MembraneDocumento1 paginaMembranejayaprinaNessuna valutazione finora
- Research Project Briefing 1Documento9 pagineResearch Project Briefing 1jayaprinaNessuna valutazione finora
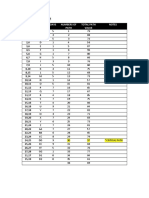
- Event Activity Days Numbers of Path Total Path Value NotesDocumento3 pagineEvent Activity Days Numbers of Path Total Path Value NotesjayaprinaNessuna valutazione finora
- Mini ProjectDocumento10 pagineMini ProjectjayaprinaNessuna valutazione finora
- DryingDocumento2 pagineDryingZhi ChaoNessuna valutazione finora
- Evaporation TutorialDocumento2 pagineEvaporation TutorialjayaprinaNessuna valutazione finora
- Assignment Soft SkillDocumento2 pagineAssignment Soft SkilljayaprinaNessuna valutazione finora
- Homework 4-Cellulosic BiomassDocumento1 paginaHomework 4-Cellulosic BiomassjayaprinaNessuna valutazione finora
- CrystallizationDocumento1 paginaCrystallizationjayaprinaNessuna valutazione finora
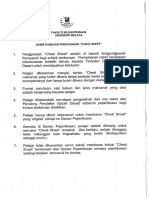
- Cheat SheetDocumento1 paginaCheat SheetjayaprinaNessuna valutazione finora
- Cooling TowerDocumento35 pagineCooling TowerjayaprinaNessuna valutazione finora
- Edited VersionDocumento24 pagineEdited VersionjayaprinaNessuna valutazione finora
- P4E2: Kinetics of Homogeneous Reaction in Batch and Continuous Stirred-Tank Reactor at Two Different TemperatureDocumento7 pagineP4E2: Kinetics of Homogeneous Reaction in Batch and Continuous Stirred-Tank Reactor at Two Different TemperaturejayaprinaNessuna valutazione finora
- A) Organosolv Pretreatment AdvantagesDocumento2 pagineA) Organosolv Pretreatment AdvantagesjayaprinaNessuna valutazione finora
- ClarenceDocumento20 pagineClarencejayaprinaNessuna valutazione finora
- Comparison of Actual and Theoretical Performance of Binary Batch Distillation in A Packed ColumnDocumento20 pagineComparison of Actual and Theoretical Performance of Binary Batch Distillation in A Packed ColumnjayaprinaNessuna valutazione finora
- Week 3Documento40 pagineWeek 3jayaprinaNessuna valutazione finora
- E1 Filmwise Condensation 2016Documento3 pagineE1 Filmwise Condensation 2016jayaprinaNessuna valutazione finora
- Tutorial 1 PDFDocumento2 pagineTutorial 1 PDFjayaprinaNessuna valutazione finora
- Boon PinDocumento13 pagineBoon PinjayaprinaNessuna valutazione finora
- Tutorial 2Documento2 pagineTutorial 2jayaprinaNessuna valutazione finora
- Bismuth Molybdates 1Documento32 pagineBismuth Molybdates 1jayaprinaNessuna valutazione finora
- Production of PenicilinDocumento6 pagineProduction of PenicilinjayaprinaNessuna valutazione finora
- Raw Material and ApplicationDocumento5 pagineRaw Material and ApplicationjayaprinaNessuna valutazione finora
- Law of ContractDocumento66 pagineLaw of ContractBryan EweNessuna valutazione finora
- Tutorial 1Documento2 pagineTutorial 1jayaprinaNessuna valutazione finora
- E4 Batch Distillation 2016Documento5 pagineE4 Batch Distillation 2016jayaprinaNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Pompe de Caldura PDFDocumento21 paginePompe de Caldura PDFLiviuNessuna valutazione finora
- Piping GuideDocumento28 paginePiping Guidealfonsodelar100% (1)
- Chem Processing - Thermal Expansion PSV For PLDocumento11 pagineChem Processing - Thermal Expansion PSV For PLace4200Nessuna valutazione finora
- Air-Conditioning - Final 2Documento46 pagineAir-Conditioning - Final 2GhemedaNessuna valutazione finora
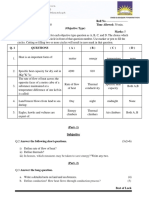
- Second Term (9th Physics T3, Unit# 09Documento1 paginaSecond Term (9th Physics T3, Unit# 09Ghulam sabirNessuna valutazione finora
- BITZER Output Data: Created On: 14.10.2023 14:16:52Documento9 pagineBITZER Output Data: Created On: 14.10.2023 14:16:52milagros robledoNessuna valutazione finora
- Fused - Revised - NSZ3 - Feb 28TH - June 4TH 2022Documento28 pagineFused - Revised - NSZ3 - Feb 28TH - June 4TH 2022thrivikramNessuna valutazione finora
- 1700 Muffle Furnace Offerfed by Julia From TEFICDocumento5 pagine1700 Muffle Furnace Offerfed by Julia From TEFICjohndoe_218446Nessuna valutazione finora
- Heating, Ventilation & Air Conditioning: Udayan Chaudhari & Associates Pvt. LTDDocumento8 pagineHeating, Ventilation & Air Conditioning: Udayan Chaudhari & Associates Pvt. LTDSiddhant Vijay SinghNessuna valutazione finora
- Hvac Research PaperDocumento8 pagineHvac Research Papergz7vhnpe100% (1)
- Exercise 7Documento70 pagineExercise 7Gomes RibeiroNessuna valutazione finora
- 04 PVT SamplingDocumento6 pagine04 PVT SamplingMohammad Iqbal Mahamad AmirNessuna valutazione finora
- Intake Eb - Ex. FansDocumento1 paginaIntake Eb - Ex. Fansibrahimrazeen313Nessuna valutazione finora
- Commissioning Report For Boiler Air and Flue Gas System Unit 1Documento6 pagineCommissioning Report For Boiler Air and Flue Gas System Unit 1Arif FebriantoNessuna valutazione finora
- Experiment #2 - Testing of An Air-Conditioning System With Simulated Indoor Environment v2.0Documento6 pagineExperiment #2 - Testing of An Air-Conditioning System With Simulated Indoor Environment v2.0IvanNessuna valutazione finora
- UG Gas Properties ActivityDocumento7 pagineUG Gas Properties Activityardianti widoriniNessuna valutazione finora
- Reflection Paper in DressmakingDocumento8 pagineReflection Paper in DressmakingMaria CeciliaNessuna valutazione finora
- Professional Standard For Ferrous Metallurgy of The People's Republic of ChinaDocumento8 pagineProfessional Standard For Ferrous Metallurgy of The People's Republic of Chinabobby chenNessuna valutazione finora
- Multi M 50Hz, R410A 5CCV0-01B 05.pdf.20050101Documento86 pagineMulti M 50Hz, R410A 5CCV0-01B 05.pdf.20050101S VU PathyNessuna valutazione finora
- 2015 Mea Tropical MultivDocumento92 pagine2015 Mea Tropical MultivPratikno SajaNessuna valutazione finora
- Tabla de CompresoresDocumento9 pagineTabla de CompresoresLuisNessuna valutazione finora
- Seresco Natatorium Design Guide 2013Documento36 pagineSeresco Natatorium Design Guide 2013Luis Giagante100% (1)
- Thermo CheatDocumento24 pagineThermo Cheatali_b1367Nessuna valutazione finora
- Ventilation Calculation UpdatedDocumento1 paginaVentilation Calculation Updatedbahaa ShehadehNessuna valutazione finora
- Syllabus CIE Physics 5054 Summary 20-21Documento25 pagineSyllabus CIE Physics 5054 Summary 20-21Rakibul Islam RanaNessuna valutazione finora
- Microbiol Incubators 6000 ImlabDocumento11 pagineMicrobiol Incubators 6000 ImlabTatit Aji WijayaNessuna valutazione finora
- Simulation Hybrid Cooling SystemDocumento8 pagineSimulation Hybrid Cooling SystemAniruddha Gupta100% (1)
- Questions - HEATTRANSFER - PROCESSING (2022)Documento196 pagineQuestions - HEATTRANSFER - PROCESSING (2022)Jake BalilaNessuna valutazione finora
- Quiz BowlDocumento60 pagineQuiz BowlApril Mae BaldozaNessuna valutazione finora
- Heating Ventilation and Air Conditioning The Heart of Modern BuildingsDocumento8 pagineHeating Ventilation and Air Conditioning The Heart of Modern Buildingsstynedale18Nessuna valutazione finora