Potrebbero piacerti anche
- Ejercicios de Integrales de Línea, Superficie y VolumenDa EverandEjercicios de Integrales de Línea, Superficie y VolumenValutazione: 4 su 5 stelle4/5 (2)
- Diagrama Bloques FormulasDocumento8 pagineDiagrama Bloques FormulasherktorNessuna valutazione finora
- Cont I - Cap. IIIDocumento87 pagineCont I - Cap. IIIWillfredo William WalasNessuna valutazione finora
- Modelos Matematicos (Flujo)Documento66 pagineModelos Matematicos (Flujo)Sofia GomezNessuna valutazione finora
- Prueba Cono Cimiento 1Documento12 paginePrueba Cono Cimiento 1David QuinteroNessuna valutazione finora
- ServomecanismoDocumento12 pagineServomecanismoNaro AlberoniNessuna valutazione finora
- Hoja de Problemas #2Documento4 pagineHoja de Problemas #2rafael alvaresNessuna valutazione finora
- Lab 2 Teoria de Control A. 1Documento10 pagineLab 2 Teoria de Control A. 1Luis Cupa H100% (1)
- Paso 3 FranklinDocumento17 paginePaso 3 FranklinMaryuryNessuna valutazione finora
- Evaluacion 2 Controladores IndustrialesDocumento16 pagineEvaluacion 2 Controladores IndustrialesArco NegroNessuna valutazione finora
- Práctica 5 - Lugar Geométrico de Las RaícesDocumento14 paginePráctica 5 - Lugar Geométrico de Las RaícesSergio Machorro Macias0% (1)
- Funciones Transfer en CIA de PulsosDocumento7 pagineFunciones Transfer en CIA de PulsosFabian Gerardo Vallejo JimenezNessuna valutazione finora
- 5.algebra de BloquesDocumento11 pagine5.algebra de BloquesAndres Salcedo100% (1)
- Funcion de Transferencia - 2Documento18 pagineFuncion de Transferencia - 2Alejandra AgudeloNessuna valutazione finora
- G2 - Ejercicios Sobre Plano ZDocumento11 pagineG2 - Ejercicios Sobre Plano ZGuillermo TabeniNessuna valutazione finora
- FinalDocumento15 pagineFinalWilliam Umbarila PinzonNessuna valutazione finora
- Lab TC 2Documento4 pagineLab TC 2ReyesArangurenJuanNessuna valutazione finora
- Ensayo de Control 1 (Control Digital)Documento5 pagineEnsayo de Control 1 (Control Digital)Paul GuillenNessuna valutazione finora
- Lab3 ControlDocumento28 pagineLab3 ControlDerek Ross QuiñonesNessuna valutazione finora
- Informe Control Cinta Transportadora1Documento7 pagineInforme Control Cinta Transportadora1Santiago MoralesNessuna valutazione finora
- Problemas Control Resueltos COMPLETO PDFDocumento103 pagineProblemas Control Resueltos COMPLETO PDFcarlos patrickNessuna valutazione finora
- Examenes SimulaciónDocumento28 pagineExamenes SimulaciónahsimNessuna valutazione finora
- Problemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0Documento63 pagineProblemas Resueltos de Sistemas de Control Continuo Primera Parte Rev0Miguel Angel Mora ÑautaNessuna valutazione finora
- Control Imc FinalDocumento17 pagineControl Imc FinalMindy MunozNessuna valutazione finora
- Diagrama de BloquesDocumento15 pagineDiagrama de BloquesgenesisNessuna valutazione finora
- Problemas de Diagrama de BloquesDocumento9 pagineProblemas de Diagrama de BloquesAlex CruzNessuna valutazione finora
- 09 - Analisis de Respuesta en FrecuenciaDocumento24 pagine09 - Analisis de Respuesta en Frecuenciañ=?!2Nessuna valutazione finora
- C04 Modelamiento Dinamico en El Dominio de La Frecuencia, Funcion de TransferenciaDocumento12 pagineC04 Modelamiento Dinamico en El Dominio de La Frecuencia, Funcion de TransferenciaPIERO ALDO SIMBRON SANCHEZNessuna valutazione finora
- ChenDocumento15 pagineChenUriel Mendez100% (2)
- Control Digital Con Matlab2Documento23 pagineControl Digital Con Matlab2Csar PariapazaNessuna valutazione finora
- Determinación Experimental de La Función de TransferenciaDocumento10 pagineDeterminación Experimental de La Función de TransferenciaRicardo Rodriguez BustinzaNessuna valutazione finora
- Controles Sistema de SuspensiónDocumento8 pagineControles Sistema de Suspensiónfotoscel682Nessuna valutazione finora
- Bode PID PDFDocumento26 pagineBode PID PDFIsaac MendibleNessuna valutazione finora
- Examen de Control Automatico Espol 2014Documento14 pagineExamen de Control Automatico Espol 2014Jose Cueva Tumbaco100% (1)
- Deber 1Documento2 pagineDeber 1Christian DavidNessuna valutazione finora
- Preguntas de TestDocumento52 paginePreguntas de Testfrank_garcia_2Nessuna valutazione finora
- Laboratorio N°1 - Trabajo GrupalDocumento22 pagineLaboratorio N°1 - Trabajo GrupalOSCAR VINICIO CHUQUITARCO LAGLANessuna valutazione finora
- Matlab2 - Funciones RLocus Bode NyquistDocumento12 pagineMatlab2 - Funciones RLocus Bode Nyquistc_cohenNessuna valutazione finora
- Hoja de Problemas #3 Electrónica PDFDocumento6 pagineHoja de Problemas #3 Electrónica PDFFidel Andía GuzmánNessuna valutazione finora
- Cuadernillo I Control IDocumento9 pagineCuadernillo I Control ITony Martinez100% (1)
- Hoja de Problemas #5MDocumento10 pagineHoja de Problemas #5MMlclm RmirzNessuna valutazione finora
- Trabajo Control AnalogoDocumento9 pagineTrabajo Control AnalogoGademara100% (1)
- Segunda Practica Calificada Domiciliaria Control Iii Ee625-MDocumento10 pagineSegunda Practica Calificada Domiciliaria Control Iii Ee625-MJose CoronacionNessuna valutazione finora
- Ejercicios de Teoria de Control AutomatiDocumento4 pagineEjercicios de Teoria de Control AutomatiNICOLAS CASTILLO ILLERANessuna valutazione finora
- Lgebra de Diagrama de BloquesDocumento42 pagineLgebra de Diagrama de BloquesHarold RodriguezNessuna valutazione finora
- Transformada Z (Informe Ieee) .1Documento6 pagineTransformada Z (Informe Ieee) .1misusibuNessuna valutazione finora
- Bode Con Polos y CerosDocumento54 pagineBode Con Polos y CerosJuan Pablo EstebanNessuna valutazione finora
- Exámenes AutomáticaDocumento199 pagineExámenes AutomáticareturboNessuna valutazione finora
- Hoja de Problemas #2 Andia PDFDocumento6 pagineHoja de Problemas #2 Andia PDFPaola Sanchez ContrerasNessuna valutazione finora
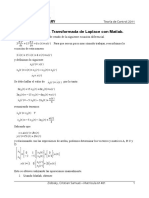
- Transformada de Laplace Con MatlabDocumento7 pagineTransformada de Laplace Con MatlabJavier Lozano MarrerosNessuna valutazione finora
- Lab 4 - 1o y 2do Orden Control PIDDocumento12 pagineLab 4 - 1o y 2do Orden Control PIDCarlos Andres RojasNessuna valutazione finora
- Ejercicios Tema1Documento6 pagineEjercicios Tema1Daisy Paola Rodriguez SuarezNessuna valutazione finora
- Laboratorio Medios de TransmisiónDocumento5 pagineLaboratorio Medios de TransmisiónAnthony YVNessuna valutazione finora
- Actividades Capitulo 7Documento14 pagineActividades Capitulo 7Anthony YVNessuna valutazione finora
- Purple Haze Feedback 1Documento21 paginePurple Haze Feedback 1Anthony YVNessuna valutazione finora
- Ejercicios ControlDocumento4 pagineEjercicios ControlAnthony YVNessuna valutazione finora
- AMd 64, Phenom y FusionDocumento16 pagineAMd 64, Phenom y FusionAnthony YVNessuna valutazione finora
- Metodología Sistémica-Cibernética para Elaborar Estructuras Organizacionales DinámicasDocumento8 pagineMetodología Sistémica-Cibernética para Elaborar Estructuras Organizacionales DinámicasSARAI CASTRONessuna valutazione finora
- 02 - Unidad 1 V3-1-17-1-5Documento5 pagine02 - Unidad 1 V3-1-17-1-5Fede BerniNessuna valutazione finora
- Tema 6 El Proceso de La ComunicaciónDocumento9 pagineTema 6 El Proceso de La ComunicaciónIria Hernández Schweicez100% (1)
- Los Gestores de Bases de Datos (SGBD) Más UsadosDocumento9 pagineLos Gestores de Bases de Datos (SGBD) Más Usadosjuliocn1Nessuna valutazione finora
- Ia 0242 Ef 23 Eism 1 195Documento22 pagineIa 0242 Ef 23 Eism 1 195Elian E DislaNessuna valutazione finora
- Informe Mensual de Las Actividades Realizadas - VillaneraDocumento13 pagineInforme Mensual de Las Actividades Realizadas - VillaneraMiguelNessuna valutazione finora
- La Dimensión Pragmática y La Teoría de La MenteDocumento32 pagineLa Dimensión Pragmática y La Teoría de La MentePablo RedifNessuna valutazione finora
- Diseño de Sistemas de Control Adelanto, Atraso y Adelanto-AtrasoDocumento15 pagineDiseño de Sistemas de Control Adelanto, Atraso y Adelanto-AtrasoJerry ValdezNessuna valutazione finora
- Caso Harvard MarketingDocumento15 pagineCaso Harvard Marketingkarla hernandezNessuna valutazione finora
- Tema 5 PsicoterapiaDocumento20 pagineTema 5 PsicoterapiaAnonymous 3D8vtRNessuna valutazione finora
- Pensum UniversitarioDocumento12 paginePensum UniversitarioJazz ManNessuna valutazione finora
- Sistemas Gestores de Bases de DatosDocumento4 pagineSistemas Gestores de Bases de Datoshomemail959Nessuna valutazione finora
- ContenidoDocumento47 pagineContenidocienciadedatos4.0Nessuna valutazione finora
- Consulta Redes NeuronalesDocumento15 pagineConsulta Redes NeuronalesNayro PazmiñoNessuna valutazione finora
- La Comunicacion HorizontalDocumento25 pagineLa Comunicacion HorizontaldownloadxpNessuna valutazione finora
- La Inteligencia Artificial: 1.copiar y Pegar El Siguiente TextoDocumento4 pagineLa Inteligencia Artificial: 1.copiar y Pegar El Siguiente TextoperlamariadematacontrerasNessuna valutazione finora
- Syllabus Ingenieria de SistemasDocumento5 pagineSyllabus Ingenieria de SistemasLuis Enrique Sastre GallegosNessuna valutazione finora
- PreoaDocumento4 paginePreoaJesus SanchezNessuna valutazione finora
- Grandes PensadoresDocumento11 pagineGrandes PensadoresScarlet Juliet Barrero Palacio100% (1)
- Inteligencia-Artificial Related Es 2023-06-29Documento36 pagineInteligencia-Artificial Related Es 2023-06-29SergioNessuna valutazione finora
- Juego de La VidaDocumento21 pagineJuego de La VidaYovani ChanNessuna valutazione finora
- Un Adiós A Aristóteles La Comunicación HorizontalDocumento23 pagineUn Adiós A Aristóteles La Comunicación HorizontalGarduskingNessuna valutazione finora
- Comprension Oral GIOVANNI, ArnoDocumento16 pagineComprension Oral GIOVANNI, ArnolmarcoNessuna valutazione finora
- 8 PsicociberneticaDocumento12 pagine8 PsicociberneticaAlexander Chura Limachi100% (1)
- Colonias de Hormigas PDFDocumento2 pagineColonias de Hormigas PDFDonnaNessuna valutazione finora
- Intervención de La Cognición Social en El PacienteDocumento17 pagineIntervención de La Cognición Social en El Pacienteprueba12345Nessuna valutazione finora
- ControlDocumento28 pagineControlCristian Gaspar GonzalesNessuna valutazione finora
- Ucv - Ventas - Grupo 7 - Modelo Aida InmobiliariaDocumento13 pagineUcv - Ventas - Grupo 7 - Modelo Aida InmobiliariaEstefany Nicole MurilloNessuna valutazione finora
- Código TABLAS - Angelo RiveraDocumento6 pagineCódigo TABLAS - Angelo RiveraRonny MosqueraNessuna valutazione finora
- Modelo de Programación Dinámica (FVR)Documento22 pagineModelo de Programación Dinámica (FVR)Jesús Micef Sierralta GóngoraNessuna valutazione finora