Potrebbero piacerti anche
- Valve Body PDFDocumento9 pagineValve Body PDFTimur TOT100% (2)
- CoreJava Ratan CompleteMarerial PDFDocumento398 pagineCoreJava Ratan CompleteMarerial PDFSivaShankar100% (7)
- Whirlpool Duet HTDocumento96 pagineWhirlpool Duet HTdanny85901100% (2)
- Electric Power Systems Research: Salvatore D'Arco, Jon Are Suul, Olav B. FossoDocumento18 pagineElectric Power Systems Research: Salvatore D'Arco, Jon Are Suul, Olav B. Fossovenkat8eNessuna valutazione finora
- New FileDocumento41 pagineNew FileHemant KhareNessuna valutazione finora
- Modelling of Wind TurbineDocumento7 pagineModelling of Wind TurbineJothi PriyaNessuna valutazione finora
- HVDC Interconnections With SMES Device For PV and Wind Hybrid Power Transmission SystemDocumento14 pagineHVDC Interconnections With SMES Device For PV and Wind Hybrid Power Transmission SystemIJRASETPublicationsNessuna valutazione finora
- Improving Control Performance in DC Micro-Grids With Distributed GenerationsDocumento12 pagineImproving Control Performance in DC Micro-Grids With Distributed GenerationsmariniNessuna valutazione finora
- Red DEv and Tripathi Journal PaperDocumento10 pagineRed DEv and Tripathi Journal PaperMichael Zontche BernardNessuna valutazione finora
- Schöll - Lens - Instability Phenomena in Interconnected Power SystemsDocumento7 pagineSchöll - Lens - Instability Phenomena in Interconnected Power Systems程浩真Nessuna valutazione finora
- 1.optimal Placement of Multiple-Type FACTS Devices To Maximize Power System Loadability Using A Generic Graphical User InterfaceDocumento3 pagine1.optimal Placement of Multiple-Type FACTS Devices To Maximize Power System Loadability Using A Generic Graphical User InterfaceksbnNessuna valutazione finora
- Aees P4Documento5 pagineAees P4Profil FaksNessuna valutazione finora
- Base PaperDocumento11 pagineBase PapersaiNessuna valutazione finora
- Ashabani 3Documento15 pagineAshabani 3happyworryNessuna valutazione finora
- An Improved SMC Control Strategies For PMSG Based WECSDocumento10 pagineAn Improved SMC Control Strategies For PMSG Based WECSGIRISHNessuna valutazione finora
- Power Quality Improvement in Grid-Connected Photovoltaic-Fuel Cell Based Hybrid System Using Robust Maximum Power Point Tracking ControllerDocumento17 paginePower Quality Improvement in Grid-Connected Photovoltaic-Fuel Cell Based Hybrid System Using Robust Maximum Power Point Tracking ControllervishnuNessuna valutazione finora
- 10 35378-Gujs 899799-1649221Documento20 pagine10 35378-Gujs 899799-1649221TabishNessuna valutazione finora
- Utilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulDocumento13 pagineUtilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulPrince Janesh UniqueNessuna valutazione finora
- Bi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsDocumento8 pagineBi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsJitender KaushalNessuna valutazione finora
- Mat LabDocumento74 pagineMat LabA RakeshNessuna valutazione finora
- EPSR Classification LiriasDocumento26 pagineEPSR Classification Liriasrevi91398Nessuna valutazione finora
- Energies 07 02476Documento22 pagineEnergies 07 02476Déjàvu ChongNessuna valutazione finora
- Smart Grids and The New Age of Energy - EEPDocumento11 pagineSmart Grids and The New Age of Energy - EEPvetsasNessuna valutazione finora
- IEEE Xplore 05659488Documento13 pagineIEEE Xplore 05659488marcelo_molina_14Nessuna valutazione finora
- He Reasons For It Are As FollowsDocumento16 pagineHe Reasons For It Are As FollowsPavan uttej RavvaNessuna valutazione finora
- Hysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDocumento11 pagineHysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDaniel PGNessuna valutazione finora
- Modeling and Analysis of Harmonic Stability in An AC Power-Electronics-Based Power SystemDocumento12 pagineModeling and Analysis of Harmonic Stability in An AC Power-Electronics-Based Power SystemCici LalangNessuna valutazione finora
- Converter Model For Representing Converter Interfaced Generation in Large Scale Grid SimulationsDocumento9 pagineConverter Model For Representing Converter Interfaced Generation in Large Scale Grid SimulationsbenjaxxNessuna valutazione finora
- IET Generation Trans Dist - 2021 - BagchiDocumento12 pagineIET Generation Trans Dist - 2021 - BagchiMohamed SobhyNessuna valutazione finora
- An Offset-Free Composite Model Predictive Control Strategy For DC DC Buck Converter Feeding Constant Power LoadsDocumento12 pagineAn Offset-Free Composite Model Predictive Control Strategy For DC DC Buck Converter Feeding Constant Power Loads1997liuchangNessuna valutazione finora
- 1 s2.0 S0378779622008823 MainDocumento17 pagine1 s2.0 S0378779622008823 MainSouhila Rached ZINENessuna valutazione finora
- Advanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemDocumento11 pagineAdvanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemChristian JimenezNessuna valutazione finora
- Power Swing Detection in The Presence of Solar Photovoltaic PlantDocumento19 paginePower Swing Detection in The Presence of Solar Photovoltaic PlantRajendra MullapudiNessuna valutazione finora
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDocumento7 pagineModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNessuna valutazione finora
- Disturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power SystemDocumento11 pagineDisturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power Systemjitenderkumar_goyal28Nessuna valutazione finora
- State Space Model of Grid Connected Inverters Under Current Control ModeDocumento10 pagineState Space Model of Grid Connected Inverters Under Current Control Modeoussama sadkiNessuna valutazione finora
- Energies 07 07694Documento23 pagineEnergies 07 07694Heitor José TessaroNessuna valutazione finora
- IEEEJESTPE2106Documento10 pagineIEEEJESTPE2106محمد عقيل عبد الامير ستارNessuna valutazione finora
- Energies: Blackbox Large-Signal Modeling of Grid-Connected DC-AC Electronic Power ConvertersDocumento22 pagineEnergies: Blackbox Large-Signal Modeling of Grid-Connected DC-AC Electronic Power ConvertersOsito de AguaNessuna valutazione finora
- Journalofelectricalengineering&Technologyvol.5, No.4, Pp.552 560,2010 ÎDocumento14 pagineJournalofelectricalengineering&Technologyvol.5, No.4, Pp.552 560,2010 ÎgeethachowNessuna valutazione finora
- 10 1016@j Ijepes 2020 106006Documento10 pagine10 1016@j Ijepes 2020 106006amina bu bakerNessuna valutazione finora
- TSP Energy 27821Documento15 pagineTSP Energy 27821Paran JothiNessuna valutazione finora
- rpg2 12088Documento12 paginerpg2 12088Akhilesh Kumar MishraNessuna valutazione finora
- 2nd Control of Single-PhaseDocumento37 pagine2nd Control of Single-PhaseCaptain GamerNessuna valutazione finora
- Energies 13 01935Documento15 pagineEnergies 13 01935Angel MomitaNessuna valutazione finora
- IET Generation Trans Dist - 2019 - Ramasubramanian - Positive Sequence Voltage Source Converter Mathematical Model ForDocumento11 pagineIET Generation Trans Dist - 2019 - Ramasubramanian - Positive Sequence Voltage Source Converter Mathematical Model ForJiaqing SuNessuna valutazione finora
- Control Strategy For Modular Multilevel Converter Applied To Active Power Injection and Reactive Power Compensation - Integration in PV MicrogridsDocumento11 pagineControl Strategy For Modular Multilevel Converter Applied To Active Power Injection and Reactive Power Compensation - Integration in PV MicrogridsGerardo OsmeNessuna valutazione finora
- Alepuz 2006Documento8 pagineAlepuz 2006Boris MakongNessuna valutazione finora
- A Predictive Energy Management Strategy For Guaranteeing Stable Operation of An Islanded MicrogridDocumento20 pagineA Predictive Energy Management Strategy For Guaranteeing Stable Operation of An Islanded MicrogridIsmael MinchalaNessuna valutazione finora
- 3 A Systematic PVQV Curves WaleedDocumento6 pagine3 A Systematic PVQV Curves Waleedwalid khanNessuna valutazione finora
- Microgrids Black StartDocumento7 pagineMicrogrids Black StartLalit ChoudharyNessuna valutazione finora
- Dual Voltage Source Inverter Using Hybrid Energy Source InverterDocumento14 pagineDual Voltage Source Inverter Using Hybrid Energy Source Inverterchauhanravi762Nessuna valutazione finora
- RmsDocumento2 pagineRmsBalauntescuNessuna valutazione finora
- Applied Energy: M.J. Hossain, T.K. Saha, N. Mithulananthan, H.R. PotaDocumento8 pagineApplied Energy: M.J. Hossain, T.K. Saha, N. Mithulananthan, H.R. PotaAlok AgarwalNessuna valutazione finora
- Improving The Performance of Integrated Power-Hardware-In-The-Loop and Quasi-Static Time-Series SimulationsDocumento11 pagineImproving The Performance of Integrated Power-Hardware-In-The-Loop and Quasi-Static Time-Series Simulationsramya sreeNessuna valutazione finora
- Midterm Report: in Electrical EngineeringDocumento11 pagineMidterm Report: in Electrical Engineeringdr.Sabita shresthaNessuna valutazione finora
- IET Generation Trans Dist - 2013 - El Moursi - Fault Ride Through Capability For Grid Interfacing Large Scale PV PowerDocumento11 pagineIET Generation Trans Dist - 2013 - El Moursi - Fault Ride Through Capability For Grid Interfacing Large Scale PV PowerHamid AslaniNessuna valutazione finora
- Diesel GensetsDocumento8 pagineDiesel GensetsSaif AliNessuna valutazione finora
- 2008 Filomena Salim Resener Bretas IEEE 1Documento9 pagine2008 Filomena Salim Resener Bretas IEEE 1ali didebanNessuna valutazione finora
- A Benchmark System For Digital Time-Domain Simulation of An Active Power FilterDocumento8 pagineA Benchmark System For Digital Time-Domain Simulation of An Active Power FilterAndreeaNessuna valutazione finora
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesDa EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNessuna valutazione finora
- Digital Substations Demystified: A Journey into the FutureDa EverandDigital Substations Demystified: A Journey into the FutureNessuna valutazione finora
- Inaugural Function Invitation PDFDocumento2 pagineInaugural Function Invitation PDFsureh32Nessuna valutazione finora
- Survey On Microgrid Control Strategies: Energy ProcediaDocumento7 pagineSurvey On Microgrid Control Strategies: Energy Procediasureh32Nessuna valutazione finora
- REFFIT - 2016 - 155 - Revision 1 - V0 PDFDocumento38 pagineREFFIT - 2016 - 155 - Revision 1 - V0 PDFsureh32Nessuna valutazione finora
- Proff Mini Shaji Thomas PDFDocumento31 pagineProff Mini Shaji Thomas PDFsureh32100% (1)
- Iftekhar Sea Service TestimonialDocumento2 pagineIftekhar Sea Service TestimonialTomenko OleksiiNessuna valutazione finora
- Kinematics-03-Subjective SolvedDocumento11 pagineKinematics-03-Subjective SolvedRaju SinghNessuna valutazione finora
- 4.10) Arch Shaped Self Supporting Trussless Roof SpecificationsDocumento11 pagine4.10) Arch Shaped Self Supporting Trussless Roof Specificationshebh123100% (1)
- Q3 NSP - SLP - RLPDocumento41 pagineQ3 NSP - SLP - RLPRushi RavalNessuna valutazione finora
- Methods of Tube Expansion in Tube To TubDocumento19 pagineMethods of Tube Expansion in Tube To Tubkurcek100% (1)
- IRF350Documento7 pagineIRF350sanniviNessuna valutazione finora
- Stay CablesDocumento22 pagineStay Cablesalex_g00dyNessuna valutazione finora
- Safety Data Sheet 84989 41 3 enDocumento4 pagineSafety Data Sheet 84989 41 3 enAdhiatma Arfian FauziNessuna valutazione finora
- AHRLACDocumento18 pagineAHRLACVictor Pileggi100% (1)
- EN 1991-1-4 NA enDocumento4 pagineEN 1991-1-4 NA enanuj3936100% (1)
- Cbse PMT 2012Documento33 pagineCbse PMT 2012Vishal RamakrishnanNessuna valutazione finora
- TD Quintolubric 888 68Documento2 pagineTD Quintolubric 888 68Haitham YoussefNessuna valutazione finora
- Applying Six Sigma at 3MDocumento13 pagineApplying Six Sigma at 3MdchNessuna valutazione finora
- VXN150 Vixion Fuel Tank PDFDocumento3 pagineVXN150 Vixion Fuel Tank PDFHarris Jum'aniandaNessuna valutazione finora
- E 7016 Product-SheetDocumento1 paginaE 7016 Product-SheetAlireza TakrimiNessuna valutazione finora
- ElectronicsDocumento3 pagineElectronicsashishkumar218Nessuna valutazione finora
- Manual PC Soundcard Scope 1.4.5Documento17 pagineManual PC Soundcard Scope 1.4.5NatashaKillerNessuna valutazione finora
- Shifting Meterials: Ground Floor ReceptionDocumento3 pagineShifting Meterials: Ground Floor Receptionvishwas pandithNessuna valutazione finora
- Comfort and Performance Your Customers DemandDocumento18 pagineComfort and Performance Your Customers Demandgizex2013Nessuna valutazione finora
- SIM BoxingDocumento2 pagineSIM Boxingkrishnakant_75Nessuna valutazione finora
- Delhi Factories Rule 1950 PDFDocumento84 pagineDelhi Factories Rule 1950 PDFAkhilesh Kumar SinghNessuna valutazione finora
- Portal Info StubDocumento11 paginePortal Info Stubzamanqomaru8Nessuna valutazione finora
- BSR NH Circle Jaipur 2016Documento103 pagineBSR NH Circle Jaipur 2016vikash kumar50% (4)
- Method StatementDocumento4 pagineMethod StatementtayitbatovNessuna valutazione finora
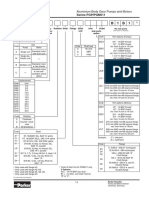
- PG 511 B 1 B 1: Ordering Code Series PGP/PGM511Documento7 paginePG 511 B 1 B 1: Ordering Code Series PGP/PGM511Four SticksNessuna valutazione finora
- Steel Top Hats Battens Capacitytables Product Technical ManualDocumento16 pagineSteel Top Hats Battens Capacitytables Product Technical ManualbhukthaNessuna valutazione finora
- Cisco Network DiagramDocumento1 paginaCisco Network DiagramĐỗ DuyNessuna valutazione finora