Potrebbero piacerti anche
- CartaDocumento2 pagineCartaEduardo Efrain RubioNessuna valutazione finora
- Alejandra Presupuestos DulcesDocumento1 paginaAlejandra Presupuestos DulcesEduardo Efrain RubioNessuna valutazione finora
- Difusion AtomicaDocumento10 pagineDifusion AtomicaEduardo Valdivia TorresNessuna valutazione finora
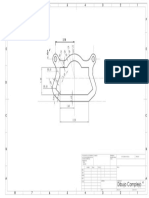
- Dibujo ComplejoDocumento1 paginaDibujo ComplejoEduardo Efrain RubioNessuna valutazione finora
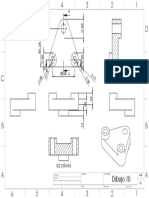
- Dibujo 10 PDFDocumento1 paginaDibujo 10 PDFEduardo Efrain RubioNessuna valutazione finora
- Dibujo 3Documento1 paginaDibujo 3Eduardo Efrain RubioNessuna valutazione finora
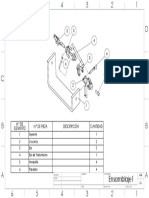
- Ensamblaje1 PDFDocumento1 paginaEnsamblaje1 PDFEduardo Efrain RubioNessuna valutazione finora
- Cotizacion 234 PDFDocumento1 paginaCotizacion 234 PDFEduardo Efrain RubioNessuna valutazione finora
- Dibujo Complejo PDFDocumento1 paginaDibujo Complejo PDFEduardo Efrain RubioNessuna valutazione finora
- Métodos Iterativos PDFDocumento12 pagineMétodos Iterativos PDFEduardo Efrain RubioNessuna valutazione finora
- Dibujo 10 PDFDocumento1 paginaDibujo 10 PDFEduardo Efrain RubioNessuna valutazione finora
- Dibujo 4Documento1 paginaDibujo 4Eduardo Efrain RubioNessuna valutazione finora
- Dibujo 1Documento1 paginaDibujo 1Eduardo Efrain RubioNessuna valutazione finora
- Dibujo 10: FechaDocumento1 paginaDibujo 10: FechaEduardo Efrain RubioNessuna valutazione finora
- PiezapuzzDocumento1 paginaPiezapuzzEduardo Efrain RubioNessuna valutazione finora
- Dibujo 1Documento1 paginaDibujo 1Eduardo Efrain RubioNessuna valutazione finora
- CrucetaDocumento1 paginaCrucetaEduardo Efrain RubioNessuna valutazione finora
- Dibujo 1 PDFDocumento1 paginaDibujo 1 PDFEduardo Efrain RubioNessuna valutazione finora
- Ensamblaje1 PDFDocumento1 paginaEnsamblaje1 PDFEduardo Efrain RubioNessuna valutazione finora
- Piezapuzz 4Documento1 paginaPiezapuzz 4Eduardo Efrain RubioNessuna valutazione finora
- Junta CardanDocumento1 paginaJunta CardanEduardo Efrain RubioNessuna valutazione finora
- Piezapuzz 3Documento1 paginaPiezapuzz 3Eduardo Efrain RubioNessuna valutazione finora
- Pieza 2Documento1 paginaPieza 2Eduardo Efrain RubioNessuna valutazione finora
- Pieza PuzzleDocumento1 paginaPieza PuzzleEduardo Efrain RubioNessuna valutazione finora
- MilanDocumento1 paginaMilanEduardo Efrain RubioNessuna valutazione finora
- Alejandra Cotizacion Colaciones Navideñas PDFDocumento1 paginaAlejandra Cotizacion Colaciones Navideñas PDFEduardo Efrain RubioNessuna valutazione finora
- Pieza4 PDFDocumento1 paginaPieza4 PDFEduardo Efrain RubioNessuna valutazione finora
- Pieza 4Documento1 paginaPieza 4Eduardo Efrain RubioNessuna valutazione finora
- Pieza 1Documento1 paginaPieza 1Eduardo Efrain RubioNessuna valutazione finora
- Recibo Hites Con LogoDocumento2 pagineRecibo Hites Con LogoEduardo Efrain RubioNessuna valutazione finora
- Carta de Bienvenida Universidad 2024Documento1 paginaCarta de Bienvenida Universidad 2024Monica Jimenez AyalaNessuna valutazione finora
- Gestión Integral de Los Residuos SolidosDocumento85 pagineGestión Integral de Los Residuos SolidosMaria Evita Camac Giles100% (3)
- Camara Termografica Mp5357sp - Tkti 10Documento0 pagineCamara Termografica Mp5357sp - Tkti 10GTribinoNessuna valutazione finora
- Las Vocales Del EspañolDocumento5 pagineLas Vocales Del EspañolMaría Ortega GalánNessuna valutazione finora
- Revista El Zapador NX 1Documento118 pagineRevista El Zapador NX 1Cristóbal CarreñoNessuna valutazione finora
- Cirujia Plastica BoliviaDocumento3 pagineCirujia Plastica BoliviaRodrigo Iglesias TorresNessuna valutazione finora
- Descripción de Una VariableDocumento13 pagineDescripción de Una VariableLILIANA MARGARITA FERNANDEZ ARIASNessuna valutazione finora
- Trabajo de Histori Adela LenguaDocumento7 pagineTrabajo de Histori Adela LenguaInés HazbunNessuna valutazione finora
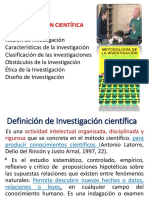
- Investigación científicaDocumento15 pagineInvestigación científicaCarmen Maria SolisNessuna valutazione finora
- Pa 01Documento4 paginePa 01EDSON JONATHAN SALINAS AYALANessuna valutazione finora
- TESIS MAG 0844 Miguel SerranoDocumento84 pagineTESIS MAG 0844 Miguel SerranoIgnatius Von Kaar100% (1)
- Caso-Practico-en-poo ResolucionDocumento6 pagineCaso-Practico-en-poo ResolucionAndrea GarciaNessuna valutazione finora
- Siprotec CursoDocumento40 pagineSiprotec Cursoenzo vallejos60% (5)
- Curso: ASPECTOS CLAVE EN LA GESTIÓN Y ORGANIZACIÓN DE UN CENTRO WELLNESS & SPADocumento3 pagineCurso: ASPECTOS CLAVE EN LA GESTIÓN Y ORGANIZACIÓN DE UN CENTRO WELLNESS & SPAEkaterina JazminNessuna valutazione finora
- Funciones Del CCLDocumento3 pagineFunciones Del CCLGaeli consultoraNessuna valutazione finora
- Las Universidades en Paraguay: Una Aproximación Al Contexto, Estructura y Resultados.Documento90 pagineLas Universidades en Paraguay: Una Aproximación Al Contexto, Estructura y Resultados.Hector EstigarribiaNessuna valutazione finora
- Reglas ortográficas y uso de letrasDocumento15 pagineReglas ortográficas y uso de letrasAngélica PérezNessuna valutazione finora
- TrabajoDocumento3 pagineTrabajoTime FUNNessuna valutazione finora
- Tarea 2 APA 1Documento5 pagineTarea 2 APA 1José Gabriel Montenegro ClassonNessuna valutazione finora
- Estimación de Combinaciones Lineales de VariablesDocumento3 pagineEstimación de Combinaciones Lineales de VariablesMariapaz Alfaro AsencioNessuna valutazione finora
- Examen 2 Programacion LinealDocumento4 pagineExamen 2 Programacion LinealSandovalGabrielaNessuna valutazione finora
- 2 7 1 - Procedimiento-AlcoholemiaDocumento2 pagine2 7 1 - Procedimiento-AlcoholemiaRicardo Alcudia0% (1)
- Camino entre versosDocumento18 pagineCamino entre versosStanley HidalgoNessuna valutazione finora
- ACTIVIDAD FINAL - Análisis de Mis Habilidades ComunicativasDocumento7 pagineACTIVIDAD FINAL - Análisis de Mis Habilidades ComunicativasCARLOS ALBERTO CHIRINOS MUNDACANessuna valutazione finora
- Identificamos problemas y necesidades de nuestra localidad mediante encuestaDocumento3 pagineIdentificamos problemas y necesidades de nuestra localidad mediante encuestaAlissa LamaNessuna valutazione finora
- Canva - PersonalDocumento3 pagineCanva - PersonalMELODY DEYSI CONDORI ARIAS100% (1)
- Formato Evidenciando Mi Aprendizaje U3Documento4 pagineFormato Evidenciando Mi Aprendizaje U3EstefaPerezNessuna valutazione finora
- Caso de Éxito Grupo NutresaDocumento4 pagineCaso de Éxito Grupo NutresaGilberto GalindoNessuna valutazione finora
- Sistema Local de Salud A y BDocumento8 pagineSistema Local de Salud A y BMar NogalesNessuna valutazione finora
- Cambio climático: cuestiones y ejercicios sobre emisiones de CO2Documento30 pagineCambio climático: cuestiones y ejercicios sobre emisiones de CO2Juan OrtizNessuna valutazione finora