Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Engineering Acoustics Course Notes
Caricato da
王龙Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Engineering Acoustics Course Notes
Caricato da
王龙Copyright:
Formati disponibili
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Course Notes for OSU ME 5194 Engineering Acoustics
Prof. Ryan L. Harne*
Department of Mechanical and Aerospace Engineering, The Ohio State University, Columbus, OH 43210, USA
*Email: harne.3@osu.edu
Last modified: 2016-09-17 10:26
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Table of contents
1
Course introduction
1.1
Scope of acoustics and answers to "why should we study acoustics?"
1.2
Noise
1.3
Sound quality
1.4
Further resources for an acoustics introduction
1.5
Mathematical notation
Mechanical vibration concepts and mathematics survey
10
2.1
The harmonic oscillator
10
2.2
Initial conditions
11
2.3
Energy of vibration
12
2.4
Complex exponential method of solution to ODEs
13
2.5
Damped oscillations
16
2.6
Forced oscillations
18
2.7
Mechanical power
22
2.8
Transfer functions
23
2.9
Linear combinations of simple harmonic oscillations
24
2.10
Further Examples
28
Wave equation, propagation, and metrics
3.1
One-dimensional wave equation
3.1.1
3.2
30
General solution to the one-dimensional wave equation
Harmonic waves
3.2.1
3.3
30
34
Harmonic waves in the complex representation
One-dimensional acoustic wave equation
3.3.1
32
36
37
Consolidating the components to derive the one-dimensional acoustic wave equation
41
3.4
Harmonic, plane acoustic waves
44
3.5
Acoustic intensity
46
3.6
Harmonic, spherical acoustic waves
47
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
3.6.1
Spherical wave acoustic intensity and acoustic power
48
3.7
Comparison between plane and spherical waves
49
3.8
Decibels and sound levels
51
3.8.1
4
55
4.1
Monopole and point acoustic sources
55
4.2
Sound fields generated by combinations of point sources
58
Directivity in geometric and acoustic far field acoustic wave radiation
61
4.3
Source characteristics
64
4.4
Dipole acoustic sources
64
4.5
Reflection: method of images
66
4.6
Sound power evaluation and measurement
72
4.7
Additional wave propagation phenomena
76
4.7.1
Doppler effect
76
4.7.2
Diffraction of sound
77
4.8
Outdoor sound propagation
79
4.8.1
Attenuation by the atmosphere
80
4.8.2
Attenuation by barriers
80
4.8.3
Total sound attenuation outdoors
81
Instrumentation for and evaluation of acoustic measurements
5.1
Microphones
82
82
5.1.1
Characteristics of microphones
84
5.1.2
Frequency response
85
5.1.3
Selecting a microphone for the measurement
88
5.2
Sound level meters
89
5.3
Frequency bands
90
5.3.1
53
Elementary acoustic sources and their sound propagation characteristics
4.2.1
Combining sound pressure levels
Using octave and one-third octave bands in acoustic measurements
91
5.4
Weighting networks
92
5.5
Locations to accurately measure sounds
95
Acoustics in and between rooms
98
RL Harne
ME 5194, Eng. Acoust. 2016
6.1
The transient sound field in a room
6.2
Absorption of acoustic energy in a room
100
6.3
Direct and reverberant acoustic fields
105
6.4
Sound transmission through partitions
107
6.4.1
6.5
7
The Ohio State University
98
Materials for sound absorption and blocking
110
Sound transmission through flexible partitions, panels
110
Applications of acoustics: noise control and psychoacoustics
7.1
Noise control
116
116
7.1.1
Overview of the human ear composition and operation for hearing sense
116
7.1.2
Noise exposure
117
7.1.3
Development for and enforcement of noise control criteria
118
7.1.4
Vehicle noise
119
7.1.5
Speech interference
120
7.1.6
Community reaction to noise
122
7.1.7
NIHL and occupational noise
123
7.1.8
Source-path-receiver methodology for noise control engineering
125
7.2
Psychoacoustics
125
7.2.1
Binaural hearing
126
7.2.2
Masking
134
7.2.3
The cocktail party effect
135
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Course introduction
Acoustics is the physics of sound. Sounds are pressure changes in a fluid medium transmitted from a source,
through the medium, to a receiver. Many sounds result from the vibrations of structures or materials. Yet,
it is not critical to have significant technical background in vibrations to understand and appreciate
acoustics. In general, for an introductory treatment of acoustics such as will be undertaken in this course
only a few mathematical preliminaries, likely encountered before in a vibrations-relevant course, are
required before embarking on one's first study in acoustics. For a treatment of acoustics at a level to explore
the underlying physical principles, consider taking an advanced acoustics course such as the OSU ME 8260
"Advanced Engineering Acoustics" after taking this course.
1.1 Scope of acoustics and answers to "why should we study acoustics?"
Lindsay's wheel of acoustics is shown in Figure 1. It features the scope of acoustics, circa 1964. The outer,
four fields are related to technical subject areas (outer annulus) and technical disciplines (inner annulus),
which are all coupled according to underlying, shared physics (core). The Acoustical Society of America
(ASA) has largely emulated this structure towards the formation of the Technical Committees that help
facilitate society activities and engagements, http://asa.aip.org/committees.html. In this course, we focus
on how the field of Engineering, and to a lesser extent the Arts and Life Sciences, utilizes acoustical
principles within the disciplines of noise, room acoustics, electroacoustics, sonic engineering, hearing, and
psychoacoustics. To exemplify the importance for these diverse contexts of acoustics, a few examples are
worthwhile.
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 1. Lindsay's wheel of acoustics, adapted from R. B. Lindsay, J. Acoust. Soc. Am. 36, 2242 (1964).
Example: Effectively engineering the acoustic qualities of rooms is essential to promote effective speech
intelligibility [1]. In rooms with too little acoustically absorptive surfaces, the reverberation time of speech
will result in adverse reflections for the listener, making it challenging to understand the message. This
phenomenon is exacerbated in the presence of background noise. This course will describe the design and
implementation methods needed to correctly tailor the acoustic qualities of rooms, such as classrooms,
auditoriums, office spaces, concert halls, household spaces, and so forth, in the ways that promote speech
intelligibility and other relevant ergonomic factors.
Example: Humans have binaural hearing, meaning that two ears are used to hear which gives rise to an
ability to more effectively locate sources of sound. Interaural-time and -level differences, ITD and ILD,
respectively, are the principal factors that govern the ability to locate sound sources [2]. The field of
electroacoustics takes advantage of these factors to create virtual sound fields using a minimal number of
acoustic transducers, such as "surround sound" audio playback in movies. This course will describe the
fundamental principles that result in "steered" sound, which is a basis for acoustic signal processing
methods used in advanced electroacoustic systems. This course will also introduce the concepts of human
binaural hearing and the intriguing nuances that found our hearing sense.
Another example considers "noise". This area of acoustic engineering is so important from the standpoint
of its application to everyday situations that it is deserving of special focus. It is also the rationale for why
acoustic consultants are compensated so well!
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
1.2 Noise
Some sounds are considered to be noise. Noise is sound that is unwanted, either because of its effect on
humans, its effect to fatigue or malfunction of physical equipment, or its interference with the perception
or detection of other sounds [3]. Noise has physiological, psychological, financial, and structural
implications (there may be others!) [4]. To name a very few examples of its importance and impact, noise
Causes tinnitus (hearing loss)
Results in increased mental stress and reduced ability for human recovery from illness and injury
Inhibits communication
Influences purchasing decisions
Contributes to structural degradation, wear, fatigue, and failure
Engineering noise control refers to efforts to obtain an acceptable noise environment for a particular
observation point or receiver, by designing or controlling the noise source, the transmission path, the
receiver, or all three [3]. Domestic and international government regulations set standards for tolerable
noise exposure levels in certain public and private areas, for instance for the permissible sound levels of
residential areas which vary according to the time of the day. The Occupational Safety and Health
Administration (OSHA) in the USA sets the 1910.95(a) standard for "occupational noise exposure" levels
permissible for workers subjected to sound levels for so many hours of a typical working day. Sound levels
in excess of these limits are grounds for significant fines, bad publicity, and remedial actions for the
company that does not monitor its operational noises' influences on its employees. In the realm of homeownership, residential property values near airport take-off trajectories are generally low because of the
significant and frequent loud noises that the residences are subjected to.
A key concept in engineering noise control is the means to tackle the problem at the source, along the
transmission path, or at the receiver. It is desirable to address noise at the source, a remedial effort to stop
it in its path, and generally unacceptable to require the receivers to accommodate a noisy environment. As
one example, "hospital noise" generated by operating pumps in medical equipment could be alleviated by
designing quieter reciprocating compressors in the pump (source), by mounting the pump onto the product
equipment with highly dissipative materials and by enclosing the pump in an acoustically sealed package
(path), or by requesting that the hospital guests wear ear plugs and other hearing protection (receiver). There
are many instances where addressing the "noise problem" at the receiving end is considered to be an
inadequate solution, such as in this hospital example. Better engineering design decisions can ensure that
such last-minute remedial actions are not needed.
Example: Consider the noise created by the party occurring one floor below your downtown apartment.
What are the source-path-receiver aspects of this problem? How could you address each of them towards
controlling the noise so as to yield a quieter acoustic environment for you?
One Answer: The source originates as various sounds from the apartment. Addressing the noise at the
source requires you or another to request the party be "toned down" or by calling the police if the hour is
late and the sounds are "excessive" since (almost) all localities have public disturbance laws in effect after
7
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
around 10:00pm. The transmission path is the apartment building structure, mainly through building stud
and drywall vibrations and air gaps between your apartment and the exterior corridor. Addressing the noise
via the path would require building modifications, or by ensuring that your apartment has strong air-tight
seals around doors and at all corners of rooms. The receiver is the acoustic environment of "you", whether
that indicates you personally or the specific room in which you are situated. Addressing the noise in the
receiving room could be accomplished by placing more acoustically absorptive materials in the room
(pillows, blankets on hard furniture, and rugs on hardwood floors). Addressing the noise for "you"
personally requires hearing protection to be worn. From this professor's experience, the latter is the easiest
and most-assured remedy, although it will not be perfect and may require adaptation to wearing ear plugs
or over-the-ear ear muffs.
1.3 Sound quality
Under the umbrella of noise control is the modern emphasis on sound quality which are mostly subjective
features of consumer products and environments. For instance, background air conditioning (HVAC) noise
should be sufficiently great to provide intra-office privacy but not become a nuisance for employee
effectiveness [5]. Car door closing sounds are significant players in the subjective evaluation of "luxury"
car brands and models [6]. While noise control engineers have been and still are major contributors in the
acoustical engineering field, there is ever-growing demand for engineers with an understanding of how
structural, mechanical, and material designs result in certain acoustic qualities that are critical to the
desirability of consumer products and environments. This makes engineers with the know-how on how to
leverage acoustic principles in their decision-making all the more sought-after.
Example: A considerable number of modern sportscars are now equipped with artificial engine sounds
produced by the audio system. This is because the requirements for more fuel-efficient engines dictates that
quieter engine "tuning" will need to be implemented since there is often, but not necessarily (particularly
for diesel engines), an inverse proportionality between high fuel economy and the level of noise generated
by an engine [7]. For instance, the 2015 Ford Mustang with EcoBoost engine "fakes" the classic throaty
engine noise attributed to that muscle car via active noise transmitted through the audio system. Similar
strategies are used on the BMW M3, Porsche 911, and many other vehicles [8] [9]. These strategies retain
"high-performance" engine sounds while improving fuel economy, thereby avoiding a detriment to sales
by attempting to sell quiet sportscars that meet fuel economy requirements. More recent attempts at
augmenting the acoustic characteristics of vehicles are intended to make hybrid automobiles louder. Given
the billions of dollars in operating revenue handled by automotive companies, monitoring the impact of
such subjective characteristics as acoustic quality -- car door sounds to engine noise to aerodynamic noise
transmitted through the chassis and glass -- is a non-trivial, but difficult to quantitatively assess, factor to
govern sales and success.
1.4 Further resources for an acoustics introduction
There is a bibliography of key textbooks and sources at the end of these notes, but web-based links of
acoustics-relevant resources, subject materials, motivational webpages are provided in the list below.
8
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
The Journal of the Acoustical Society of America http://scitation.aip.org/content/asa/journal/jasa
Applied Acoustics http://www.journals.elsevier.com/applied-acoustics/
ASME
Journal
of
Vibration
http://vibrationacoustics.asmedigitalcollection.asme.org/journal.aspx
Journal of Sound and Vibration http://www.journals.elsevier.com/journal-of-sound-and-vibration
IEEE
Transactions
on
Ultrasonics,
Ferroelectrics,
and
and
Acoustics
Frequency
Control
http://ieeexplore.ieee.org/xpl/RecentIssue.jsp?punumber=58
Noise Control Engineering Journal http://ince.publisher.ingentaconnect.com/content/ince/ncej
Sound and Vision Magazine http://www.soundandvision.com/
Audioholics Magazine https://www.audioholics.com/
1.5 Mathematical notation
In the course notes, the following mathematical notations will be used consistently.
We will always use j to denote the imaginary number, j 1 .
Bold mathematics denote complex numbers, for example k 8.0 j 2.3 , d De jt . If written out by hand,
we use an underline to denote a complex number, for example k 8.0 j 2.3 , d De jt .
Mathematics with overbar denote vectors, for example v 2.1i 1.2 j 2.3k , u ux ex u y ey .
Bold and barred mathematics denote complex vectors, for example u ux i u y j e jt .
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Mechanical vibration concepts and mathematics survey
2.1 The harmonic oscillator
We review the mathematical foundations of mechanical vibrations analysis that you previously encountered
in a "System Dynamics" course or similar.
Consider Figure 2 which shows the schematic of a mass-spring oscillator having one dimension of motion,
x (SI units [m]), with respect to the fixed ground. There are no gravitational influences to account for in
this context.
The spring exerts a force on the mass m (SI units [kg]) according to the deformation of the spring with
respect to the ground. Assuming that the spring has no undeformed length, the spring force is therefore
f sx where the spring stiffness s has units [N/m]. Applying Newton's second law of motion, we
determine the governing equation of motion for the mass
m
d2x
f sx
dt 2
(1)
Rearranging terms and using the notation that that overdot indicates the d / dt operator, we have that
mx sx 0
(2)
Based on the fact that stability conditions require m and s to be >0, we can define a new term 02 s / m
such that the governing equation (2) becomes
x 02 x 0
(3)
Figure 2. Mass-spring oscillator.
Solution to the second-order ordinary differential equation (ODE) (3) determines the displacement x of the
mass for all times. Solving ODEs is commonly accomplished by assuming trial solutions and verifying
their correctness. By engineering intuition, such as one's visual conception of a mass at the end of a Slinky
and how that object may move, we hypothesize that a suitable trial solution to (3) is
x A1 cos t
(4)
By substitution, we find that (4) is a solution to (3) when 0 . Likewise, we also discover that an
alternative trial solution to (3) is
x A2 sin 0t
(5)
10
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
When an ODE has multiple solutions, the total solution is the superposition of the individual solutions.
Thus, the general solution to (3) is
x t A1 cos 0t A2 sin 0t
(6)
The term 0 is called the natural angular frequency and it has units [rad/s]. Thus, the mass will exhibit
oscillatory motion at 0 . There are 2 radians in a cycle, which gives that the frequency in cycles per
second is 0 / 2 . We refer to this as the natural frequency f0 0 / 2 which has units [Hz = cycles/s].
In practice, we would physically observe the mass oscillation over a duration of time. The period T of one
oscillation is therefore T 1/ f 0 [s].
2.2 Initial conditions
To determine the unknown constants A1 and A2 , we need to leverage further knowledge of the situation.
For instance, two initial conditions are required to solve a second-order ODE. Thus, if the mass
displacement at an initial time t 0 is x t 0 x0 and the initial mass velocity is x t 0 x0 u0 we
can determine the constants by substitution.
x0 A1 cos 0 0 A2 sin 0 0 A1
(7)
u0 0 A1 sin 0 0 0 A2 cos 0 0 0 A2
(8)
Using this knowledge, the general solution to (3), and the mass displacement described for all time, is
x t x0 cos 0t
u0
sin 0t
(9)
Alternatively, we may express these two sinusoidal functions using an amplitude and phase
x t A cos 0t
( 10 )
1/2
2
where A x02 u0 / 0
and tan u0 / 0 x0 .
The time derivative of displacement is velocity
x t u t 0 A sin 0t U sin 0t
( 11 )
where we defined the speed amplitude U 0 A . Likewise, the acceleration becomes
a t 0U cos 0t
( 12 )
From these results, we see that the velocity leads the displacement by 90, and that the acceleration is 180
out-of-phase with the displacement, Figure 3. This response is fully dependent upon the initial conditions
of displacement and velocity. Such response is referred to as the free response or free vibration.
11
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
50
40
10x displacement [m]
velocity [m/s]
30
acceleration [m/s 2]
response
20
10
0
-10
-20
-30
-40
-50
0.2
0.4
0.6
0.8
1
time [s]
1.2
1.4
1.6
1.8
Figure 3. Free vibration response of mass-spring oscillator.
2.3 Energy of vibration
From physics, the potential energy associated with deforming a spring is the integration of the spring force
across the path of deformation
x
E p sxdx
0
1 2
sx
2
( 13 )
Here, we assume our integration constant is zero, which means that our minimum of potential energy E p
is set to zero. If we substitute (10) into (13), we find that
Ep
1 2
sA cos 2 0t
2
( 14 )
By definition from physics, the kinetic energy of the mass is
Ek
1 2 1
mx mu 2
2
2
( 15 )
Likewise, by substitution of (11) into (15) we have
Ek
1
mU 2 sin 2 0t
2
( 16 )
The total energy of this dynamic system is the summation of potential and kinetic energies
E E p Ek
1
1
1
m02 A2 mU 2 sA2
2
2
2
( 17 )
where we have used the definition 02 s / m and the identity sin 2 cos2 1 .
The total energy (17) is independent of time, which is evidence of the conservation of energy. The total
energy is equal to both the peak elastic potential energy (when kinetic energy is zero) and the peak kinetic
energy (when potential energy is zero). Figure 4 illustrates the instantaneous exchange between potential
and kinetic energies over the course of the mass-spring system oscillation.
12
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
30
total energy
potential energy
kinetic energy
energy [J]
25
20
15
10
5
0
0.2
0.4
0.6
0.8
1
time [s]
1.2
1.4
1.6
1.8
Figure 4. Exchange of energy between potential and kinetic forms as mass-spring oscillates.
2.4 Complex exponential method of solution to ODEs
A useful technique in harmonic analysis of engineering problems is the complex exponential form of
solution. In this course, we will use the engineering notation e jt where the imaginary number is j 1
. This notation is in contrast to the notation used in physics and mathematics e jt . When confronted with
a derivation performed according to the physics notation, to convert to the engineering notation requires
taking the complex conjugate. In other words, one replaces the j by j everywhere to recover the
engineering notation. Table 1 consolidates the primary acoustics textbook references which use the complex
exponential notations. One observes a similar number of books in the engineering "camp" as in the
"physics/math" camp. Note that the underlying principles of acoustics are derived from physics, Figure 1,
so this result should not be surprising.
Table 1. Primary acoustics textbook usage of the complex exponential notation.
engineering e jt notation
[10] [11] [12] [13] [14]
physics/math e jt notation
[15] [16] [17] [18] [19]
Recalling the equation (3), the more general solution method is to assume
x t Aet
( 18 )
where we use the boldface type to represent complex numbers, with the exception of the explicit description
of the imaginary number j 1 . By substituting (18) into (3), one finds that 2 02 and thus
j0 . Since two solutions are obtained, the general solution to (3) by the complex exponential notation
is the superposition of both terms associated with j0
x t A1e j0t A2e j0t
( 19 )
Recall the initial conditions, x 0 x0 and x 0 x0 u0 . By substitution we find
13
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
x0 A1 A2
( 20 )
u0 j0 A1 j0 A2
( 21 )
from which we find
u
u
1
1
A1 x0 j 0 , and A 2 x0 j 0
2
2
0
0
( 22 )
We see that the unknown constants A1 and A 2 are complex conjugates. Substituting (22) into (19) and
using Euler's identity e cos sin , we find
1
1
u
u
u
x x0 j 0 e j0t x0 j 0 e j0t x0 cos 0t 0 sin 0t
0
0
0
2
2
( 23 )
The result in (23) is the same as (9). Thus, although we used a complex number representation of the
assumed solution (18), satisfying the initial conditions which are both real entailed that the complex
components of the response were eliminated. In general, there is no need to perform this elimination
process, because the real part of the complex solution is itself the complete general solution of the real
differential equation. For example, we could have alternatively assumed only
x t Ae j0t
( 24 )
Given that, in general, A a jb , we have that
Re x a cos 0t b sin 0t
( 25 )
. Then we can satisfy the initial conditions
x0 a0
( 26 )
u0 0b
( 27 )
Thus, a x0 and b u0 / 0 . Then by substitution of a and b into (25), we again arrive at (23) confirming
the conclusion that the real part of the complex solution is the complete general solution.
We will use similar assumed solution forms as (24) throughout this course. According to the relation
between displacement, velocity, and acceleration, we summarize
u j0 Ae j0t j0 x
( 28 )
a 02 Ae j0t 02 x
( 29 )
The term e j0t is a unit phasor that rotates in the complex plane, while A is a complex function that modifies
the amplitude of the rotating amplitude and shifts it in phase according to the complex component of A .
14
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Thus, A a 2 b2 and tan b / a such that we have A cos 0t Re Ae
j 0t
. Figure 5
illustrates how the complex exponential form representation may be considered in the complex plane. The
magnitude-scaled phasor rotates in the plane with angular rate 0 as time changes, while the Real
contribution of the phasor oscillates between positive to negative values. By considering (28), the velocity
phasor leads the phasor rotation of displacement by 90 while the acceleration phasor is out-of-phase with
the displacement phasor by 180
Figure 5. Physical representation of a phasor.
Example: Consider the harmonic response shown in Figure 3. Determine the sinusoidal x t and complex
phasor x t representations of the oscillation displacement. Plot the complex phasor representation on a
real and imaginary coordinate plane for t 1/ 8 [s]. Confirm that the real part of the complex phasor is the
same as the sinusoidal representation.
Answer: The amplitude of the displacement is approximately 1.2 (note the 10x scaling for visualization
purposes), thus, A 1.2 [m]. The frequency of the oscillation is 1 cycle per second, thus 0 2 1
[rad/s]. The initial velocity u0 is approximately -2 [m/s]. Using (26) and (27), we find that a 1.2 and
b 2 / 2 1/ . Therefore, we find that tan 1 1/1.2 14.8 or 0.259 [rad]. With these
components, we can express the two representations of the sinusoid
x t 1.2cos 2 t 0.259
( 30 )
x t 1.2e
( 31 )
j 2 t 0.259
A plot of the phasor representation of this harmonic oscillation at the time t 1/ 8 [s] is shown in Figure
6.
The complex phasor representation is expanded by Euler's identity to yield
x t 1.2e
j 2 t 0.259
1.2cos 2 t 0.259 j1.2sin 2 t 0.259
15
( 32 )
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Thus, the real part of this is Re x t 1.2cos 2 t 0.259 which is the same as (30), thus verifying the
equivalence
1
x(t)=1.2*exp[j*(2*pi*1/8+0.259)]
0.9
0.8
imaginary axis
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
-0.2
0.2
0.4
real axis
0.6
0.8
Figure 6. Phasor representation.
Table 2. MATLAB code to generate Figure 6.
A=1.2;
phi=14.8*pi/180;
omega_0=2*pi;
t=1/8;
x=1.2*exp(j*(2*pi*t+phi));
figure(1);
clf;
plot([0 abs(x)*cos(2*pi*t+phi)],[0 abs(x)*sin(2*pi*t+phi)],'-r');
xlabel('real axis');
ylabel('imaginary axis')
axis equal
legend('x(t)=1.2*exp[j*(2*pi*1/8+0.259)]','location','northwest');
2.5 Damped oscillations
All real systems are subjected to phenomena that dissipate their kinetic energy as time elapses. In general,
these damping phenomena decrease the amplitude of free oscillations as time increases. Unlike forces
characterized with potential energy and inertial forces associated with kinetic energy, damping forces are
often identified empirically, meaning that sequences of tests are conducted to study the rate at which energy
decays in the system according to changes in the damping element's parameters. A common form of
damping observed is viscous damping, which exerts a force proportional to the velocity of the mass away
from its equilibrium, Figure 7.
f r Rm
dx
dt
( 33 )
where the damping constant Rm has a positive value and SI unit [N.s/m]. We refer to this damping constant
as the mechanical resistance. Typical dampers use turbulent phenomena of fluids or gasses being forced
through orifices and channels to induce dissipative effects proportional to the damper extensional velocity.
16
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 7. Damped harmonic oscillator schematic.
Considering the damped mass-spring oscillator schematic of Figure 7, we again apply Newton's laws to
yield
mx Rm x sx 0
( 34 )
By incorporating our definition of the natural angular frequency, we express
x
Rm
x 02 x 0
m
( 35 )
To solve this equation, we resort to the complex exponential solution method assuming that
x t Aet
( 36 )
By substituting (36) into (35), we find
2 Rm
2
jt
m 0 Ae 0
( 37 )
The only non-trivial solution to (37) requires that the terms in brackets be equal to zero. Thus
2 02
1/2
( 38 )
where we have introduced Rm / 2m which has units of [1/s]. Often, the damping is small such that
0 . We can then consider rearranging the radicand by defining the damped natural angular frequency
d 02 2
( 39 )
such that the term is given by
jd
( 40 )
Considering the other common conventions of denoting damping, we recognize that
Rm
0
2m
( 41 )
where is termed the damping ratio. From this, we recognize that 0 , and d 0 1 2 .
Substituting (40) into (36), the general solution to the damping mass-spring oscillator free vibration problem
is
17
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
x e t A1e jd t A2 e jd t
( 42 )
As described and demonstrated previously, only the real part of (42) is the complete, general solution to
(36). Thus, we can express (42) as
x t Ae t cos d t
( 43 )
As before, the constants A and are determined by applying initial conditions to (43) and its first
derivative.
Unlike the undamped harmonic oscillator considered in 2.1, the vibrations of the damped oscillator decay
in amplitude in time by virtue of the term e t . To assess the rate at which this decay occurs, we recognize
that the term has units of [1/s]. Thus, we can therefore define a relaxation time 1/ which
characterizes the decay of the oscillation amplitude as time increases.
displacement [m]
1.5
1
0.5
0
-0.5
-1
Figure 8. Damped free oscillation.
4
time [s]
/ 0 0.1 , and the same additional parameters as those to generate Figure 3.
2.6 Forced oscillations
In contrast with free vibration, forced oscillations are those induced by externally applied forces f t ,
Figure 9. This modifies the governing equation (34) to yield
mx Rm x sx f t
( 44 )
For linear response by the harmonic oscillator, the total response is the summation of the individual
responses. Thus, by recalling Fourier's theorem that any periodic function may be described using an infinite
series of sinusoids (even when the period extends for an infinitely great duration), we consider that the force
f t is composed according to f t fi t where each fi t accounts for one of the harmonic,
i
sinusoidal components of force. Based on this, by linear superposition we only need to solve for the
response of the oscillator when subjected to harmonic forces occurring at single frequencies. Once we solve
for the individual displacement responses xi t corresponding to their respective harmonic forces fi t ,
we then obtain the total response by the superposition of the individual displacement responses.
18
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 9. Schematic of forced damped harmonic oscillator.
Therefore, in this course we will often consider harmonic driving inputs at single frequencies, such as
f t F cos t . When excited by such a force from a state accounting for unique initial conditions of
displacement and velocity, the oscillator will undergo two responses: transient response associated with the
initial conditions and a steady-state response associated with the periodic forcing function.
The steady-state response is the solution to the ODE (44) and it considers the initial conditions to be zerovalued during the solution process.
The transient response is the solution to the ODE (34) accounting for the initial conditions and zero-valued
forcing function. For systems with even an infinitesimal amount of damping, the transient response decays
as time increases. At times sufficiently greater than the relaxation time 1/ , the transient response is
insignificantly small when compared to the steady-state response induced by the forcing function.
In many engineering contexts, and often in acoustical engineering, we will be concerned with the steadystate response. In these cases, the complex exponential solution approach to the ODE (44) will be favorable.
jt
Consider that the real driving force f t F cos t is replaced with the complex driving force f t Fe
. Then, the equation (44) becomes
mx Rm x sx Fe jt
( 45 )
Since the real part of the driving force represents the actual driving force, similarly, the real part of the
complex displacement Re x that solves the equation (45) represents the actual displacement in resulting
from the force.
To proceed with the solution, we assume x Ae jt and by substitution into (45) we have
2 m j Rm s Ae jt Fe jt
( 46 )
In general, the application of the above approach refers to the assumption of time-harmonic response. Such
assumption does not rely upon forced excitation of response, as will be seen in the analysis of acoustic
systems, since the use of the complex exponential solution form is simply one way to satisfy the ODE.
We then solve for the complex displacement coefficient A and substitute that back into the assumed
solution form to determine the complex displacement
Fe jt
1
Fe jt
s 2 m j Rm j Rm j m s /
( 47 )
19
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Similar to the case of free vibration for (28), the complex steady-state velocity of the mass is u jx
u
Fe jt
Rm j m s /
( 48 )
We now introduce the complex mechanical input impedance Z m
Zm Rm jX m
( 49 )
where we define the mechanical reactance X m m s / . The magnitude of the mechanical impedance
Zm Z m e j is
1/2
2
Z m Rm2 m s /
( 50 )
while the corresponding phase angle is found from
tan
X m m s /
Rm
Rm
( 51 )
Considering (49), the dimensions of the mechanical impedance are the same as the mechanical resistance,
[N.s/m].
Considering (48), we see that the mechanical impedance is equal to the ratio of the driving force to the
harmonic response velocity
Zm =
f
u
( 52 )
From (52), we see that the complex mechanical impedance Z m is the ratio of the complex driving force f
to the complex velocity u of the system. The interpretation of (52) is important.
First, note that (52) is a transfer function between f and u in the frequency domain.
Second, for large mechanical input impedance magnitudes, (52) indicates that large force is
required to achieve a given system velocity, all other factors remaining the same. Whereas in
contrast, for small mechanical impedance magnitudes it is relatively easy to apply the harmonic
driving force to obtain considerable system velocity in oscillation.
It is also important to recognize that the mechanical input impedance can be measured by collocated
force transducer and velocity transducer on the mechanical system. Because the transfer function
of mechanical input impedance is in the frequency domain, it can be computed by taking the ratio
of the Fast Fourier transforms of the force and velocity measurements.
Thus knowing the mechanical input impedance, one may compute the complex velocity for a different
harmonic forcing function according to u f / Zm . By virtue of the assumed solution form x Ae jt , the
20
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
complex displacement becomes x f / jZm . In other words, determining Z m is analogous to solving the
differential equation of motion for the linear system.
As a result, the actual displacement is the real part
Re x Re f / jZm x F / Zm sin t
( 53 )
whereas the actual speed is
Re u u F / Z m cos t
( 54 )
From (54), for a constant amplitude of the harmonic force, it is seen that the speed of the mass is maximized
when the impedance magnitude is minimized. This occurs when
m s / 0 s / m 0
( 55 )
In other words, when the harmonic excitation frequency corresponds to the natural frequency, the speed of
the mass oscillation will be maximized. This phenomenon is called resonance. Thus, at resonance, the
impedance is minimized and purely real, such that the speed is
u
F jt
F
e and u Re u
cos t
Rm
Rm
( 56 )
As seen in (56), for a given harmonic force amplitude, when driven at resonance the system response is
damping- or resistance-controlled. In other words, the damping is the principal determinant for the
amplitude of the system velocity at frequencies close to resonance.
When the excitation frequency is significantly less than the natural angular frequency 0 , we write
Z m / m Rm / m j 2 02
Z m / m Rm / m j 02
Z m Rm j s / Z m js /
( 57 )
Thus, when the excitation frequency is much less than the natural frequency, the mass velocity is
u
j F jt
e
s
( 58 )
from which we see that the complex displacement is
x
F jt
e
s
( 59 )
yielding that the actual mass displacement is
x Re x
F
cos t
s
( 60 )
21
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
This shows that at excitation frequencies considerably less than the natural frequency, the system response
is stiffness-controlled.
Similarly, for high frequencies, 0 , this routine will yield that the complex acceleration is
F jt
e
m
( 61 )
given a real acceleration response of
a Re a
F
cos t
m
( 62 )
which shows that at high excitation frequency the system response is mass-controlled.
Summarizing the findings from the above derivations:
Around resonance 0 the system is damping- or resistance-controlled and the velocity is
independent of frequency, although the band of frequencies around which this occurs is typically
narrow for lightly damped structures in many engineering contexts
For harmonic excitation frequencies significantly below the natural angular frequency 0 ,
the system is stiffness-controlled and the displacement is independent of the excitation frequency
For excitation frequencies much greater than the natural angular frequency 0 , the system is
mass-controlled and the acceleration is independent of the excitation frequency
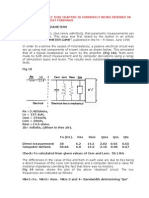
These results are summarized by the example plot shown in Figure 10.
2
10
amplitude
10
velocity [m/s]
displacement [m]
acceleration [m/s]
-2
10
-4
10
-2
10
-1
10
10
frequency [Hz]
Figure 10. Harmonic force excitation of damped mass-spring oscillator.
10
10
Rm =0.377 [N.s/m], m =1 [kg], s =39.5 [N/m], F
=1 [N].
2.7 Mechanical power
In acoustical engineering applications, the power and energy associated with sound sources and radiation
are critical factors to assess in the determination of acoustic performance and quality. To first introduce
these concepts, we consider the power relations for the mechanical oscillator.
22
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
The instantaneous mechanical power i delivered to the harmonic oscillator is determined by the product
of the instantaneous driving force and the corresponding instantaneous speed
i
F2
cos t cos t Re f Re u
Zm
( 63 )
In general, the average power delivered to the system is the more relevant engineering quantity to
consider. The average power is the instantaneous power averaged over one cycle of oscillation
1 T
F2
d
t
i
T 0
2 2Z m
F2
2 Z m
F2
cos
2Z m
2 /
cos
2 /
cos t cos t dt
t cos cos t sin t sin dt
( 64 )
Recalling (51),
tan
X m m s / sin
Rm
Rm
cos
( 65 )
which shows that cos Rm / Zm and leads to the result that the average power delivered to the mechanical
oscillator is
Rm F 2
2 Z m2
( 66 )
The units of power, whether instantaneous or average, are Watts, [W]. When the oscillator is driven at
resonance 0 , the average power becomes F 2 / 2Rm which shows that the peak average power
delivered to the oscillator is also damping-controlled.
2.8 Transfer functions
The mechanical input impedance is a transfer function between the complex driving force and the complex
velocity of the oscillator. Similar transfer functions will be encountered throughout this course on acoustics.
In the general case of complex numbers, such as x1 A1e j 1 and x2 A2 e j 2 , the transfer function
computation involves the multiplication or division of the complex numbers.
Example: Determine and plot the transfer function x1 / x2 for the oscillations shown in Figure 11 that
vibrate with the same frequency .
Answer: The amplitude x1 A1 1.6 [m], while the amplitude x2 A2 0.94 [m]. Consider that the phase
of x1 is 1 =0. In this light, x 2 leads x1 by about 0.2 [s] which is one-fifth of the oscillation period,
23
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
T 2 / [s] where the oscillation frequency is approximately f =1 [Hz] yielding that the angular
oscillation frequency is 2 [rad/s]. To recognize that x 2 leads x1 , as opposed to the opposite case,
consider that the peak of x 2 occurs at time 0.8 [s] while another 0.2 [s] elapses until the peak of x1 occurs.
Thus, the phase of x 2 relative to x1 is determined with respect to one period of the oscillation.
2 2
1 2
[rad/s]
5 5
Thus, x1 1.6e j1 e jt 1.6e jt and x2 0.94e j 1 2 e jt 0.94e
2
5
e jt . Therefore, the transfer function
x1 / x2 is
x1
x2
1.6
0.94e
2
5
1.7e
2
5
Putting this into real and imaginary components, x1 / x2 1.7cos 2 / 5 j1.7sin 2 / 5 . This transfer
function result is plotted below. Note that this vector rotates in the complex plane as time elapses via e jt .
2
displacement [m]
x1
x2
-1
-2
0.2
0.4
0.6
0.8
1
time [s]
1.2
1.4
1.6
1.8
Figure 11. Harmonic oscillations.
imaginary axis
0
-0.5
-1
-1.5
-2
-1
0
real axis
Figure 12. Transfer function of the two harmonic oscillations.
2.9 Linear combinations of simple harmonic oscillations
In numerous vibration and acoustics contexts, it is often needed to determine the amplitude of response
associated with a combination of individual responses. We are considering only linear systems here, so the
principle of linear superposition applies.
Consider two harmonic oscillations at the same angular frequency . These two harmonic oscillations are
termed coherent or correlated due to the sharing of frequency.
24
RL Harne
ME 5194, Eng. Acoust. 2016
x1 A1e j t 1 and x2 A2 e j t 2
The Ohio State University
( 67 )
The linear combination x x1 x2 is therefore
Ae j t A1e j1 A2 e j2 e jt
( 68 )
Determining the magnitude A and the total phase is accomplished trigonometrically from considering
representative phasors in the complex number coordinate plane, Figure 13
1/2
2
2
A A1 cos 1 A2 cos 2 A1 sin 1 A2 sin 2
tan
A1 sin 1 A2 sin 2
A1 cos 1 A2 cos 2
( 69 )
( 70 )
Figure 13. Phasor combination of
x x1 x2 .
The real response displacement is
x Re x1 Re x2 A cos t
( 71 )
As will be seen throughout later portions of this course, many response metrics of interest in acoustics
involve mean-square and root-mean-square quantities. The mean-square is computed by
2 /
2 /
x12
A cos t dt
2
( 72 )
A cos t 1 dt
2
1
Keep in mind that the name "mean-square" indicates the operators occur to the expression from the rightto-left: thus, square the expression first and secondly take the mean. Using trigonometric identities on (72)
yields
x
2
2
1
2 /
1
1
A12 cos 2t dt A12
2
2
( 73 )
25
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
The root-mean-square (RMS) is the square root of the mean-square quantity, and is typically denoted by
xrms . Likewise, operate on the expression from the right-to-left: square the expression, take the mean, and
then take the square root of the mean result. Thus, continuing the derivation from (73), it is seen that the
RMS oscillation displacement is
x1, rms
A1
( 74 )
so as to relate the response amplitude A1 to the RMS value of the harmonic component x1,rms via
2 x1,rms A1 .
From the perspective of complex exponential representations (67), the RMS of the oscillation is likewise
the amplitude of the response divided by the square-root of 2.
For the summation of two harmonic oscillations having the same frequency (71), the mean-square is found
by steps. First, the square Re x x 2 is
2
x 2 A12 cos 2 t 1 A22 cos 2 t 2 2 A1 A2 cos t 1 cos t 2
1 2
1
A1 1 cos 2t 21 A22 1 cos 2t 22 A1 A2 cos 2t 1 2 cos 1 2
2
2
( 75 )
where trigonometric identities are used to transition from the first to second line of (75). Then, we compute
the mean-square x 2 and find
1 2 1 2
A1 A2 A1 A2 cos 1 2
2
2
2
x1 x22 2 x1 x2 cos 1 2
x2
( 76 )
Thus, for harmonic oscillations occurring at the same frequency , a significant variation in the total
response may occur as relates to the mean-square output. For instance, if A0 A1 A2 and if 1 2 0 ,
then the mean-square displacement is x 2
1 2 1 2
A0 A0 A02 2 A02 so as to quadruple the mean-square
2
2
result with respect to an individual harmonic oscillation:
1
2
1 2
A0 . On the contrary, if the A0 A1 A2 and
2
1
2
2 1 0 , then we find x 2 A02 A02 A02 cos A02 A02 0 which shows that out-of-phase
oscillations destructively interfere so as to eliminate the mean-square measure. Of course, this occurs for
direct oscillation summation, as well, but this also confirms that the mean-square quantity likewise is
eliminated.
Again adopting the perspective of complex exponential representations (67), the RMS can be computed
from comparable steps. The results of (69) and (70) have indeed already yielded the bulk of the derivation:
26
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
x A1e j t 1 A2e j t 2 A1e j1 A2e j2 e jt Ae j t
( 77 )
where A and are defined in (69) and (70), respectively. Considering what was shown in (72-74), the
RMS of x is
xrms
( 78 )
One may perceive a contradiction between (78) and the example cases above that demonstrated that the
RMS of a summation of harmonic oscillations at the same frequency can potentially constructively or
destructively interfere. Yet, recalling (69), the amplitude in (78) varies according to such phase differences
between the oscillations. Therefore, for instance in the event of perfect destructive interference by waves
of the same amplitude but out-of-phase, we find A 0 which was shown above.
Note that in general, x Ae jt where the contribution of the phase is included within the complex
2
rms
amplitude A . Thus, x
A
2
Two oscillations that occur at different frequencies are termed incoherent or uncorrelated. When the
oscillations do not occur at the same frequency, there is no further simplification to adopt for
x x1 x2 A1 cos 1t 1 A2 cos 2t 2
( 79 )
For the mean-square quantity, the computation shows
x 2 x12 x22
( 80 )
Also, the RMS quantities are the summation of the individual terms
2
xrms
x1,2rms x2,2 rms
( 81 )
The same results for the mean-square and RMS quantities would be obtained by applying the complex
exponential form of the response.
Finally, by linear superposition, the procedures outlined above for two harmonic oscillations extend to any
number of oscillations. In particular, for coherent or correlated sinusoid summation, it is found that
2
2
A An cos n An sin n
1/2
tan
( 82 )
A sin
A cos
n
( 83 )
Thereafter, following the computation of (82), the mean-square and RMS values follow naturally from
computations of (72) and (78), respectively.
27
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
For incoherent or uncorrelated sinusoid summation, there are no general simplifications available to
employ for the resulting oscillation itself, although the mean-square and the RMS quantities are respectively
computed from
x 2 xn2
( 84 )
2
xrms
xn2,rms
( 85 )
2.10 Further Examples
Problem: Plot the average mechanical power in [W] associated with a harmonically driven oscillator where
the complex force is f F e jt
F0
e jt with F0 =1.4 [N.s2], and the oscillator characteristic
parameters are m =150 g, s =400 [N/m], and Rm =(0.03,3) [N.s/m]. Between the two cases of mechanical
resistance (damping), remark upon a comparison of this result to the case in which the amplitude of the
complex force is independent of the harmonic excitation frequency, i.e. f F0e jt . Use F0 =1.4 [N].
Answer: As evident by the derivation from (64), the relation (66) holds whether the amplitude of the
complex force is independent or dependent on the excitation frequency since time is averaged and not
frequency. Thus, in (66), for the frequency-dependent force amplitude, one replaces F
. Thus, using
2
the code in the Table 3 below, the plots below are generated. It is observed in general that the rate of power
delivery to the oscillator above the natural frequency f0 0 / 2 8.2 [Hz] is substantially less for the
case of the excitation force with frequency-dependent characteristics than for the force with amplitude that
is frequency-independent. The frequency-independent excitation force is most efficient at delivering power
to the oscillator at resonance while this is not necessarily the case for when the force is frequencydependent. For instance, for the frequency-dependent excitation force, the significance of the damping
determines whether or not the power delivery around resonance is substantially greater than the power
provided to the oscillator at frequencies nearby resonance (such as within one order-of-magnitude).
28
RL Harne
ME 5194, Eng. Acoust. 2016
Rm=0.03 [N.s/m]
The Ohio State University
Rm=3 [N.s/m]
10
10
10
-5
10
-5
power [W]
power [W]
10
-10
10
-10
10
-15
10
frequency dependent complex force amplitude
frequency independent complex force amplitude
-20
10
10
10
frequency [Hz]
frequency dependent complex force amplitude
frequency independent complex force amplitude
-15
10
10
10
frequency [Hz]
Table 3. MATLAB code used to generate the plots above.
F_0=1.4; % [N] complex force magnitude constant
m=0.15; % [kg] mass of oscillator
s=400; % [N/m] stiffness of oscillator
R_m=0.03; % [N.s/m] mechanical resistance (damping) of oscillator
omega_0=sqrt(s/m); % [rad/s] natural angular frequency
omega=omega_0*logspace(-1,1,901); % [rad/s] range of excitation frequency
F1=F_0./omega.^2; % [N] amplitude of complex force, frequency dependent
F2=F_0; % [N] amplitude of complex force, frequency independent
Z_m=(R_m^2+(m*omega-s./omega).^2).^(1/2); % [N.s/m] mechanical input impedance
power1=R_m/2*F1.^2./Z_m.^2; %[W] power with frequency dependent force
power2=R_m/2*F2.^2./Z_m.^2; %[W] power with frequency independent force
figure(1);
clf;
loglog(omega/2/pi,power1,'-k',omega/2/pi,power2,'--r');
xlim([min(omega) max(omega)]/2/pi);
xlabel('frequency [Hz]');
ylabel('power [W]');
legend('frequency dependent complex force amplitude','frequency independent complex force amplitude','location','south');
title(['R_m=' num2str(R_m) ' [N.s/m]']);
29
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Wave equation, propagation, and metrics
3.1 One-dimensional wave equation
The wave equation characterizes the propagation of oscillation energy through space without net mass
transport. Waves are in significant contrast to mechanical vibrations. In mechanical vibrations, the energy
is associated with the displacements and velocities of a lumped mass: thus, "where it goes" is a direct
determinant of the associated energy quantity. Waves propagate energy via phenomena that do not require
the mass to "go somewhere". Such a unique yet simple physics is what sets acoustics apart from vibrations.
We first derive the wave equation for the one-dimensional, longitudinal deformations of a rod (also called
"bar") because it is a valuable step to establish methods required to derive the acoustic wave equation.
Consider the undeformed and deformed rod differential element dx in Figure 14(a). We assume that the
rod in which the element belongs has an infinite length (i.e. reflections at ends are neglected). The rod has
constant properties including cross-sectional area S [m2], Young's modulus Y [N/m2], and density per unit
volume [kg/m3]. The rod is subjected to longitudinal forces that produce longitudingal displacements
x, t . For narrow rods with respect to the rod length, these displacements are effectively the same
throughout a given cross-section; in other words, we assume that the deformations x, t are uniform over
a given cross-sectional area of the rod. The location of the differential element at time t =0 is shown in the
top of Figure 14(a) while the bottom of Figure 14(a) illustrates how the element is deformed following the
elapse of time t .
Figure 14. (a) Deformed one-dimensional rod. (b) Free-body diagram of the differential element. (c) Schematic of the
approximation of the deformation.
The free-body diagram of the differential element is shown in Figure 14(b). The forces on the faces of the
cross-sectional areas are determined via Hooke's law. Consider the "left" face of the differential element
first, we find
F x, t S x, t
( 86 )
30
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
where x, t is the stress on a given face, and we have adopted the convention that the stress is positive
in compression and negative in tension. Stress is related to the material strain via the constitutive relation
x, t Y x, t
( 87 )
In (87), the positive compressive stress is a result of a negative strain; because the Young's modulus Y is
positive, the right-hand side of (87) is likewise a positive value. Although this convention is the reverse of
that used by materials scientists, it is convention in the context of studying acoustics because positive
pressure changes correspond to decreases in the volume of a fluid. Finally, we use the strain-displacement
relation for this compressive stress
x, t
x, t
( 88 )
All together, the force on the differential element face is found to be
F x, t SY
x, t
( 89 )
Equation (89) is Hooke's law for the rod. The force on the "right" face of the differential element is
F x dx, t SY
x dx, t
( 90 )
A Taylor series approximation for the displacement is taken to yield
x dx, t x, t
x, t
x
( 91 )
dx
This approximation is illustrated in Figure 14(c). Of course, for small deformations from the original
element, the approximation is reasonably accurate. For all purposes in this course, we will consider such
small amplitude perturbations from an equilibrium which form the underpinnings of a significant proportion
of topics in acoustics. By using (91), we find that (90) is written
F x dx, t SY
x, t
x, t
2 x, t
x
,
t
dx
SY
SY
dx
x
x
x
x 2
( 92 )
The average acceleration of the differential element is shown in Figure 14(c) and is
2 x, t
t 2
( 93 )
dx
Using Newton's second law, we obtain the governing equation of motion for the rod
F x, t F x dx, t S
2 x, t
t 2
( 94 )
dx
31
RL Harne
SY
SY
ME 5194, Eng. Acoust. 2016
x, t
x
2 x, t
x 2
x, t
2 x, t
2 x, t
SY
SY
dx
S
dx
x
x 2
t 2
2 x, t
The Ohio State University
( 95 )
( 96 )
t 2
Equation (96) is then put into a new form
c2
2 x, t
x 2
2 x, t
( 97 )
t 2
Equation (97) is the one-dimensional wave equation. The term c is the phase speed and, as will be shown
below, it is the speed at which the wave propagates in the rod,
c Y /
( 98 )
In SI units, the phase speed is [m/s]. The wave equation (97) is a partial differential equation (PDE) unlike
the ODEs dealt with in mechanical vibrations. As a result, and intuitively, the "oscillations" associated with
the rod deformation vary in time and in space (along the rod length).
3.1.1
General solution to the one-dimensional wave equation
The general solution to the wave equation (97) was derived by mathematician Jean le Rond d'Alembert in
1747. The proof of this solution is outside the scope of this course (interested individuals should see [20]),
so we will only focus on its consequences in realizing wave phenomena according to its satisfaction of (97).
Consider a solution to (97) of the general form
x, t 1 ct x 2 ct x
( 99 )
where the terms in the parentheses are the arguments of functions 1 and 2 (like is the argument of
sin ), as opposed to multipliers. These two functions can be arbitrary [20]. We investigate this general
solution (99) by considering the result of a single function 1 at different times, t1 and t2 , Figure 15.
Because the wave shape remains constant, we find that 1 x1 , t1 1 x2 , t2 . As a result, the arguments of
the functions must result in the same outcome. Consider that the wave at x1 at time t1 is the same as the
wave response at x2 at time t2 . Thus, the wave function arguments between these two times must yield the
same result
ct1 x1 ct2 x2 c
x2 x1
t2 t1
( 100 )
As a result, it is clear that the parameter c is the speed at which a wave propagates. It is termed the phase
speed because this is the rate at which a point of the wave having constant phase travels. The latter will
32
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
become more apparent when we consider harmonic waves. Occasionally, for longitudinal vibrations, c is
referred to as a wave speed.
If we repeat the analysis for 2 ct x , we find that in increasing time the wave travels "to the left". Thus,
comparing the arguments ct x and ct x , we see that waves either travel to the right ( ct x ) with
increasing values of x having constant phase, or waves travel to the left ( ct x ) with decreasing values of
x having constant phase. As shown in (99), the general solution to the wave equation (97) is the summation
of both of these individual functions.
Figure 15. Wave function propagating in time.
Example: Determine the phase speeds for aluminum, steel, and titanium rods. Use the material properties
Table 4. For the steel rod, what would the density need to be for the phase speed to equal the speed of light?
Describe an example of why achieving such a property may be advantageous for an engineering system.
Table 4. Material properties
[kg/m3]
[N/m2]
aluminum
steel
titanium
2800
7800
4500
69
109
200
Answer: The phase speeds are found to be
Aluminum: c
Steel: c
69 109
4964 [m/s]
2800
200 109
5064 [m/s]
7800
Titanium: c
116 109
5077 [m/s]
4500
33
109
116
109
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
For the steel rod to possess a phase speed (for wave propagation) equal to the speed of light ~ 300 [Mm/s],
the density would need to be 200 109 / 300 106 2.22 [g/m3]. One conceivable application for an
2
engineering material that could transmit elastic longitudinal waves at the speed of light which is the "rate"
at which electronics work. Thus, one could make a mechanical breadboard with such a material.
3.2 Harmonic waves
To explore harmonic waves, we consider a semi-infinite rod subjected to a harmonic force with frequency
and amplitude F . Figure 16 shows a schematic of the system. Because the rod is infinite, x 0, ,
and because the harmonic force f t F cos t is at x 0 , there are no means for negative-x traveling
waves to occur. Thus, in the problem only positive-x traveling waves are considered.
Recall the one-dimensional wave equation (97) expressed again here for convenience
c2
2 x, t
x 2
2 x, t
( 101 )
t 2
At the boundary x 0 , the harmonic force is applied such that the force on the rod is
f t SY
0,t
( 102 )
Based on the excitation force, we assume a space- and time-dependent solution of the form
x, t A sin k ct x
( 103 )
Figure 16. Semi-infinite rod with harmonic force at one end.
The assumed solution (103) has the argument ct x and thus should satisfy the wave equation. Here, the
unknowns are A and k . By substitution of (103) into (101), we indeed find
c2 A sin k ct x c 2 A sin k ct x
( 104 )
Thus, (103) satisfies (101). However, to determine the unknowns A and k , we must apply the boundary
condition at the end of the rod with the applied force. Likewise, by substituting (103) into (102), we find
F cos t SYAk cos kct
( 105 )
For (105) to be satisfied at all times, two properties must be established. First, the amplitude is found to be
34
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
F
SYk
( 106 )
Secondly, the cosine arguments must be the same, yielding
k
( 107 )
where k is termed the wavenumber and has units [1/m]. As a result, we express the solution to (101) using
(103) with the constants (106) and (107) substituted, to give
x, t
F
sin t kx
SYk
( 108 )
We now consider the solution (108) to the wave equation (101) in detail. For example, the sine argument
repeats every 2 . Thus, for a fixed location along the rod
0, t Asin t Asin t 2 A sin t T
( 109 )
where we have introduced the term T to indicate the period of oscillation. From (109), it is apparent that
T 2 / which gives that the period has units [s].
Similarly, for a fixed time, we have
x,0 Asin kx Asin kx 2 Asin kx k
( 110 )
where we have introduced the term which is the wavelength. The wavelength is the spatial duration
between successive repeating phases, alternatively considered to be successive peaks of the deformation
amplitude when considering sinusoidal deformations. From (110), we find that 2 / k , and thus the
wavelength has units [m]. Figure 17 shows a plot of the longitudinal deformation waves passing through a
rod over the duration of 20 micro-seconds [s].
Figure 17. Snap shots of wave shape of longitudinal rod vibrations varying across three distinct time increments.
In acoustical engineering contexts, the wavenumber and wavelength are repeatedly used in the design and
assessment of acoustic performance and functionality. It is important to emphasize their relation and
meaning.
35
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
The wavelength is the spatial duration of a repeating harmonic wave shape, and for harmonic
deformations is easily identified as the distance between peaks.
The wavenumber k is the amount of phase change that occurs per unit distance.
The equation relations are summarized as
2 / k ; k / c ; 2 c / c / f
( 111 )
As evident from the summary of (111), long wavelengths (large wavelength values) correspond to low
frequencies f (small frequency values) for the same phase speed c , which is only a function of material
properties (98). Small wavenumbers k also correspond to low frequencies. It is important to keep these
basic trending behaviors in mind in many acoustical engineering contexts.
3.2.1
Harmonic waves in the complex representation
Consider now that the harmonic force is given by
f t Fe jt
( 112 )
We then assume a time-harmonic response solution form to the wave equation (101) of
x, t Ae j t kx
( 113 )
Specifically, (112) is time- and space-harmonic since the wavenumber/wavelength relationships correspond
to periodic spatial change of wave characteristics, such as here the longitudinal rod vibrations.
By substitution of (112) and (113) into (102), we find
Fe jt SYAjke jt
( 114 )
such that
A
F
F
j
jSYk
SYk
( 115 )
Upon substitution of (115) into (113), we determine
x, t j
F j t kx
e
SYk
( 116 )
Given that the complex response (116) is excited by the real part of the input force (112), F cos t , which
is the actual input force, then the real part of (116) that corresponds to the actual deformation is found from
x, t j
F
F
F
cos t kx j sin t kx
sin t kx j
cos t kx
SYk
SYk
SYk
Re x, t x, t
F
sin t kx
SYk
( 117 )
( 118 )
36
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
where it is clear that (118) agrees with the result obtained via assuming the sinusoidal form of response
(108).
Example: Find the complex mechanical input impedance, Z t f t / 0, t for the rod subjected to the
complex force given in (112).
Answer: Using the result (116) and the input force (112), we find
Z t
F
SYk
j F
j
SYk
which can be simplified using
Z t
SYk
SY
1
1
S c2 S c
c
c
We observe that the mechanical input impedance for the harmonically driven longitudinal deformations of
the rod is purely resistive meaning that energy is only removed from the rod. This is intuitive because the
rod is infinitely long and input energy at x 0 will only propagate as waves away from the driving force.
3.3 One-dimensional acoustic wave equation
Towards deriving the acoustic wave equation and its subsequent evaluation to characterize acoustical
performance and qualities of numerous engineering systems and applications, we must first define several
variables and constants. In the following, we assume that the fluid is lossless and inviscid meaning that
viscous forces are negligible, and assume that the fluid undergoes small (linear), relative displacements
between adjacent particles prior to a pressure change.
These fluid particles imply an infinitesimal volume of fluid large enough to contain millions of fluid
molecules so that within a given small fluid element the element may be considered as a uniform,
continuous medium having constant acoustic variables (defined below) throughout the element.
Of course, at smaller and smaller scales, the individual fluid molecules that make up the fluid element are
in constant random motion at velocities far in excess of the particle velocities associated with acoustic wave
propagation. Thus within any given fluid element, these molecules may in fact leave the element in an
infinitestimal duration of time. Yet, they are replaced by other molecules entering the element. The
consequence is that evaluating the relatively slow motions associated with wave propagation does not need
to account for the very small time-scale dynamics of the individual fluid molecules.
Because we consider only linear relative displacements between the fluid particles, our theoretical
development is limited to accurate treatment of linear acoustic phenomena. The same applies to the
consideration of pressure/density fluctuations which are very small wth respect to ambient pressure/density
fluctuations. While focused on linear contexts, these linear acoustic phenomena are the core of a significant
proportion of all acoustic events in air-borne and water-borne acoustic applications. Thus, omitting
37
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
nonlinear acoustic wave propagation characteristics in our analysis only inhibits evaluation of a small
number of applications, that include shock wave propagation and extremely high intensity acoustic waves.
Acoustic pressure p x, t is the pressure fluctuation around the equilibrium (atmospheric) pressure P0 :
p x, t P x, t P0 . The SI units of pressure are Pascals [Pa=N/m2]. The atmospheric pressure is P0
100 [kPa] near sea level. Here, x is the spatial dimension, limited currently to one dimension. The fluid
particle displacement is x, t while the fluid particle velocity is u x, t
x, t
t
x, t . The
equilibrium (atmospheric) fluid density is 0 , while the instantaneous fluid density is x, t .
Figure 18. Schematic of one-dimensional pipe with pressure variation due to piston motion at x 0 .
To derive the acoustic wave equation, three important components are required:
the equation of state
the equation of continuity
the Euler's equation
Equation of state. The fluid must be compressible to yield changes in pressure. Therefore, the
thermodynamic behavior of the fluid must be considered. Assuming an ideal gas is our fluid, the pressure
is a function of density and for small pressure changes this can be expressed via a Taylor series
P P0
0
0
1 2 P
2 2
...
( 119 )
Because the pressure and density fluctuations within the fluid element associated with a significant
proportion of acoustic sound pressure levels are so small, the terms in (119) of order 2 and greater are
insignificantly small, thus
P P0
( 120 )
38
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
which is the linear approximation of the pressure change from ambient condition. From (120) we rearrange
to yield
P
P P0 0
0
0
( 121 )
The term on the right-hand side of (121) in brackets [ ] is called the condensation s 0 / 0 . The
condensation is the relative deviation of fluid element density from a reference value. The term on the righthand side in the curly brackets { } is the adiabatic bulk modulus B . Finally, as already defined, the term
on the left-hand side is the acoustic pressure.
p Bs
( 122 )
Equation (122) is the equation of state. It may be thought of as "Hooke's law for fluids", since it relates a
fluid "stress" (pressure) to the fluid "strain" (condensation) through the fluid "stiffness" (bulk modulus). A
particular mathematical difference from the solid mechanics analogy is that (122) is a scalar equation since
pressure has no directionality within a differential element.
Equation of continuity. Within an unchanging, defined volume of space, pressure changes cause mass to
flow in and out of the volume. By conservation of mass, the net rate with which mass flows into the volume
through the enclosing surfaces of the volume must be equal to the rate with which the mass increases within
the volume. Figure 18(d) illustrates the scenario. A constant volume element of a duct is enclosed by two
constant cross-sectional areas S spanning a differential length dx . The mass flow rate in the left-most
volume surface is
S u
( 123 )
while the mass leaving the volume on the right-most volume surface is approximated by a Taylor series
expansion to be
u
S u
dx
x
( 124 )
The net rate of mass influx is therefore
u
u
S u S u
dx S
dx
x
x
( 125 )
The rate at which the mass in the control volume changes is equal to
S
dx
t
( 126 )
Thus, by conservation of mass, we obtain the equation of continuity (128)
39
RL Harne
u
x
ME 5194, Eng. Acoust. 2016
dx S
The Ohio State University
dx
t
( 127 )
0
t
x
( 128 )
Thus, by (127), the time rate of change of mass in the control volume is equal to the net influx of mass in
the same time duration. Extended to three dimensions, the equation of continuity becomes
u 0
t
( 129 )
where is the gradient operator (see Appendix A7 of [10] for a review of how differential operators act
on scalars and vectors) and the overbar on the particle velocity represents the fact that it is a vector quantity
in three dimensions: u ux x u y y uz z where x , y , and z are the unit vectors, respectively.
For small (linear) changes of acoustic pressure, the linearized equation of continuity (128) is
s u
0
t x
( 130 )
Equation (130) is the linear continuity equation in one dimension. Recall that the continuity equation is
developed from a conservation of mass within a defined volume of space. In three dimensions the equation
is
s
u 0
t
( 131 )
The condensation s is the relative difference between the instantaneous fluid density and the equilibrium
density
s
0
0
( 132 )
Euler's equation. Unlike for the continuity equation, we now focus on a fluid element that is deformed in
consequence to the pressure differences between the left-most and right-most faces, see Figure 18(a,b,c).
The pressure on the left-most face is P x, t while, by a Taylor series approximation, the pressure on the
right-most face is P x, t
P x, t
x
dx . Thus, the force difference between left and right faces is
P x, t
P x, t
P x, t P x , t
dx
dx
x
x
( 133 )
This force accelerates the fluid within the changing volume, such that an application of Newton's second
law (a force balance) yields
40
RL Harne
ME 5194, Eng. Acoust. 2016
P x, t
x
dx S 0
2 x, t
t 2
The Ohio State University
( 134 )
dx
P
u
0
x
t
( 135 )
where we have simplified the notation in (135) by using the particle velocity rather than particle
displacement and have dropped the repeated arguments x, t for conciseness. In addition, the acceleration
of the fluid is linearized in (134) and (135) [10], which is the relevant range of fluid dynamics considered
in many applications of acoustics. Noting that P P0 p and that P0 / x 0 , equation (135) may be
simplified
p
u
0
x
t
( 136 )
Equation (136) is the linear Euler's equation. In three dimensions, the derivation yields
p 0
3.3.1
u
t
( 137 )
Consolidating the components to derive the one-dimensional acoustic wave equation
To summarize for one-dimensional acoustic waves
equation of state p Bs
equation of continuity
Euler's equation
( 138 )
s u
0
t x
( 139 )
p
u
0
x
t
( 140 )
First, we take the spatial derivative of (140)
2 p
2u
0
x 2
xt
( 141 )
Second, we take the time derivative of (139) and multiply by the equilibrium density
2 s
2u
0
t 2
xt
( 142 )
Then, we add (141) and (142) to yield
2 p
2 s
0
x 2
t 2
( 143 )
Using (138), we have s p / B and by substitution into (143), we obtain the one-dimensional acoustic
wave equation (145) for plane waves in the x-axis
41
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
2 p 0 2 p
x 2
B t 2
( 144 )
2 p 1 2 p
x 2 c 2 t 2
( 145 )
where the sound speed is c B / 0 . Plane waves indicate that the wave travels strictly in one direction
and there are no pressure variations through a cross-section that is perpendicular to the axis of wave
propagation. In three dimensions, the acoustic wave equation is
2 p
1 2 p
c 2 t 2
( 146 )
The operator 2 is the Laplacian operator and is unique with respect to the coordinate system under
consideration, see Appendix A7 of [10]. Figure 19 illustrates the differences between plane wave and
cylindrical wave propagation. To summarize, plane waves are one-dimensional waves with no mean change
in pressure through the cross-section normal to the wave propagation axis, and these waves are governed
by (145). Cylindrical waves (and spherical waves) exhibit a spreading effect away from the sound source
and are governed by (146) according to the appropriate Laplacian operator.
As shown in Figure 19, although the fluid particles individually oscillate with a particle velocity (a few
examples are shown as red dots), the transmission of the wave is not subject to the uniform transmission of
fluid particles. This is the significant difference between wave propagation in acoustics and the vibrations
of mechanical systems.
42
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 19. Differences between plane wave propagation (top) and cylindrical wave propagation (bottom) shown for
different times
ti . Made using Mathematica notebook http://library.wolfram.com/infocenter/MathSource/780/. Also see
http://www.acs.psu.edu/drussell/Demos/waves/wavemotion.html
To summarize the developments and assumptions, the equations (145) and (147) here derived are the linear
(small pressure changes), lossless (inviscid) acoustic wave equation in one and three dimensions,
respectively.
For ideal gases undergoing adiabatic compression, the bulk modulus of elasticity is
B 0
P0
( 147 )
where is the ratio of specific heats which is specific to a given gas. In general P0 / 0 is almost
independent of pressure so that the sound speed is primarily a function of temperature. Thus, an alternative
derivation of the sound speed for air yields
c rTK c0 1 TC / 273
( 148 )
where TC is the temperature in degrees [C]. c0 is the sound speed in air at 0 [C] which is approximately
c0 =331.5 [m/s] at 1 [atm] pressure (sea level) and at 0 [C]. Appendix A10 of [10] provides a table of
material properties for common gases.
43
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
3.4 Harmonic, plane acoustic waves
The one-dimensional acoustic wave equation for plane waves propagating in the x-axis (145) is similar to
the one-dimensional wave equation determined for longitudinal harmonic deformations of the rod (97).
Plane waves imply that no change of pressure occurs in a cross-section perpendicular to the direction of
wave propagation. Likewise, we can anticipate that the complex exponential form of harmonic solution that
satisfied (97) will also satisfy (145).
Therefore, we assume
p x, t Ae j t kx Be j t kx
( 149 )
The particle velocity is determined from Euler's equation (140)
p
u
1 p
1
0
u x, t dt jkAe j t kx jkBe j t kx dt
x
t
0 x
0
jk
1 j t kx
u x, t
Ae j t kx Be j t kx
Ae
Be j t kx
j0
0 c
( 150 )
The second line of (150) exemplifies the time-harmonic form of the Euler's equation for plane waves, which
is written p / x j0u jk 0cu .
Using that k / c and expressing p Ae
j t kx
and p Be
j t kx
, the particle velocity components in
the positive + and negative - directions are found to be
u p / 0c
( 151 )
Breaking (151) up, we see u p / 0c while u p / 0 c .
The specific acoustic impedance is the ratio of acoustic pressure to fluid particle velocity and, like for
mechanical vibrations, is a measure of resistance and reactance of the fluid media to inhibit or assist the
propagation of waves:
( 152 )
z =p/u
Therefore, for plane waves,
z=
p
0 c
p / 0 c
( 153 )
the specific acoustic impedance is purely real and dependent upon the direction of wave travel. The
interpretation of a purely real impedance for traveling waves is that energy is transferred without return
from a previous source or origin. Impedances with imaginary components indicate reciprocating energy.
This description is in agreement with the damped harmonic oscillator impedance in Sec. 2.6 where
imaginary impedance components, the reactance, are associated with the inertial and spring forces, whereas
the real impedance components, the resistance, is associated only with the damping forces.
44
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
For air at 20 [C], the specific acoustic impedance is 0 c =415 [Pa.s/m]. These units are sometimes referred
to as rayls in honor of Lord Rayleigh, formerly John William Strutt. Rayleigh's "The Theory of Sound"
from 1894 [21] is a remarkable treatise on acoustics. The book is in the public domain since the copyright
has expired, so it is a worthy download https://en.wikipedia.org/wiki/John_William_Strutt,_3rd_Baron_Rayleigh
Because the product of atmospheric density and sound speed constitute the impedance, their combination
is typically more important in acoustics applications than the individual values alone.
Let's extend the plane wave analysis to forced excitations of air in a duct. Consider a duct of infinite length,
filled with air, and harmonically excited by a rigid piston on one end, Figure 20. The piston moves with a
displacement defined by d t De jt where D is the harmonic displacement amplitude. Because the duct
has infinite length, plane waves only propagate in the +x direction. Thus
p x, t Ae j t kx
( 154 )
We are interested to determine how "loud" the pressure waves will be (i.e. pressure amplitude) in
consequence to a known displacement amplitude D of the piston.
To determine this, we must apply the boundary condition that indicates that air particle velocity at the piston
surface must be equal to the piston velocity (presuming that no cavitation and shocks occur in the duct).
We therefore use Euler's equation (140), knowing that u 0, t j De jt ,
p 0, t
x
u 0, t
( 155 )
jk Ae j t 0 2 De jt A j
0 2
k
D j0 cD
( 156 )
Therefore, the acoustic pressure in the duct is
Re p x, t Re j0cDe j t kx 0cD sin t kx
Figure 20. Plane waves in a duct excited by a piston.
45
( 157 )
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Example: What is the amplitude of the acoustic pressure in a duct with an end-firing piston harmonically
oscillating with amplitude of displacement D =20 [m] and at a frequency f =120 [Hz]? Assume the air
temperature is 20 [C].
Answer: The amplitude of the acoustic pressure is p x, t 0cD . Using the provided values, and seeing
above that the specific acoustic impedance 0 c of air at 20 [C] is 415 [Pa.s/m], we find that
2120 415 20 106 6.26
[Pa].
3.5 Acoustic intensity
As observed in (153) by the lack of complex terms, acoustic pressure and the particle velocity are in phase
for plane waves. As a result, acoustic power is transmitted.
The instantaneous intensity I t pu of an acoustic wave is the rate per unit area at which work is done
by one element of the acoustic fluid on an adjacent fluid element. Note that in general, the particle velocity
is a vector u and thus the intensity is also vector quantity. The units of I t are [W/m2]. The average
acoustic intensity I is the time average of I t
I I t
pu
1
1
Re p Re u dt pudt
T0
T0
( 158 )
where, for harmonic waves with angular frequency , the period is T 2 / , and the integration
considers the real components of pressure and particle velocity.
In general throughout this course, unless otherwise specified, use of the term acoustic intensity refers to the
time-averaged version (158) and not the instantaneous measure of intensity.
For plane waves, the intensity is one-dimensional so that we drop the overbar, thus recognizing that "travel"
in the opposing direction is indicated by a change of sign:
I
p2
0 c
0 c u 2
( 159 )
Using the relations for mean-square, RMS, and amplitude, the intensity may be written as
I prms urms
2
prms
P2
0 c 2 0 c
( 160 )
Then, for a specific problem under consideration, the acoustic pressure amplitude P is found by applying
a boundary condition, for instance respecting an acoustic source in a duct (see above).
In general, when using the complex exponential representation of acoustic variables, thus considering timeharmonic oscillations, the time-harmonic [average] intensity is computed from
46
RL Harne
ME 5194, Eng. Acoust. 2016
1
Re pu*
2
The Ohio State University
( 161 )
where the asterisk denotes the complex conjugate, the vectorial notation on particle velocity is retained, and
the 1/2 multiple results from the time-harmonic integration. This time-harmonic intensity is only a vector
if u spans more than one dimension.
Note that for a complex function x ,
1
1 2
2
Re x x* xrms
x .
2
2
3.6 Harmonic, spherical acoustic waves
For spherically symmetric sound fields, use of the appropriate Laplacian operator in (146) and use of the
chain rule of differentiation allows us to express the wave equation as
2 rp
r 2
2
1 rp
c 2 t 2
( 162 )
It is apparent that this equation is similar to (145) with the variable mapping p rp . Thus, we can use the
same, general solution to the wave equation via
rp f1 ct r f 2 ct r
( 163 )
Then, we express the acoustic pressure, without loss of generality as
p r, t
1
1
f1 ct r f 2 ct r
r
r
( 164 )
which is valid for all r 0 . For the first term of (160), the waves are outgoing, from the origin r 0 , and
spread in greater and greater areas from the origin. For the second term of (160), the waves are incoming
and increase in intensity approaching an origin. In this second case, there are few examples in linear
acoustics that pertain to such self-focusing of sound energy by a wavefield converging to an origin. So we
hereafter neglect the second term of (160).
By and large, the most important spherically-spreading acoustic waves are harmonic, in which case we may
assume a solution to (161) of the form
p r, t
A j t kr
e
r
( 165 )
Using the Euler's equation (137) applicable to all coordinate systems, and knowing (Appendix A7 [10])
p r
p
1 p
1 p
, the particle velocity is derived as
r
r
r sin
1 p r, t
u r , t 1 j
kr 0 c
( 166 )
47
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Using (161) and (162), the specific acoustic impedance for spherical waves is found to be
z
p
jkr
kr
0 c
0 c
e j 0 c cos e j
2
u
1 jkr
1 kr
cot kr
( 167 )
( 168 )
The magnitude of the impedance is
z
P
0 c cos
U
( 169 )
such that the relation between the pressure and particle velocity amplitudes is
P 0cU cos
( 170 )
Considering an alternative expression for the spherical wave pressure (164) by making the amplitude A
real, we have
p r, t
A j t kr
e
r
( 171 )
such that the real component of the pressure, which is the actual acoustic pressure, is
p r, t
A
cos t kr
r
( 172 )
Using (167), the particle velocity amplitude is
U
1 A 1
0 c r cos
( 173 )
while, by (166), the particle velocity is shifted in phase with respect to the acoustic pressure by an amount
. Thus, the real component of the particle velocity is
u r, t
3.6.1
1 A 1
cos t kr
0 c r cos
( 174 )
Spherical wave acoustic intensity and acoustic power
The acoustic intensity for spherical waves is computed in the same manner as for plane waves, it is the time
average of work per unit area that fluid particles exert on neighboring particles:
T
1
P cos t kr U cos t kr dt
T 0
( 175 )
Carrying out the integration (175) shows that
48
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
P2
2 0 c
( 176 )
which is the same as for plane waves. In fact, (175) is exactly true for plane and spherical waves.
On the other hand, what the amplitude P constitutes is not the same between plane and spherical waves.
As shown above, the pressure amplitude for plane waves is not a function of distance from the acoustic
source plane. In contrast, for spherical waves the pressure amplitude is inversely proportional to the radial
distance from the acoustic source origin (172). As a result, we express (176) using I A2 / 20cr 2 which
shows that the acoustic intensity for spherical waves varies in proportion to 1/ r 2 . This means that the
energy radiated to a field point that is a distance r from the spherical wave origin (source) is reduced in
proportion to the squared distance between source and point, and explains why sounds decay as they travel
distances from their origin point[s].
In general, the acoustic power (sometimes also termed sound power) is the sound energy per time radiated
by an acoustic source, and is defined according to the intensity via
I ndS
( 177 )
where S is a surface that encloses the sound source and n is the unit normal to the surface. Thus the dot
product in (177) refers to the component of the intensity vector that is normal to the enclosing surface under
consideration. For a given radial distance from a source of sound, if the intensity has the same magnitude,
then the acoustic power is simply IS .
For plane and spherical waves, only one direction of wave propagation is considered, either a single axis of
one-dimensional motion or a radial direction spreading, respectively. For spherical waves, the area through
which the sound spreads is 4 r 2 . Thus, the acoustic power is
4 r 2 I 4 r 2
2
prms
0 c
( 178 )
3.7 Comparison between plane and spherical waves
A comparison of the plane wave acoustic pressure and particle velocity with those corresponding values
for spherical waves shows significant differences. It is instructive to consider the term kr which can be
expressed, using (111), as 2 / r . Thus, when kr 1 the observation radial position of the acoustic
pressure and velocity variables is approximately within one acoustic wave wavelength from the sound
origin.
Thus, when kr 1 , the imaginary component of the spherical wave particle velocity (162) is as important
or more significant than the real component. This means there is a phase difference between
increases/decreases in the pressure and particle velocity for spherical waves near the origin of the sound
49
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
source from which the waves propagate. As a result, the specific acoustic impedance of spherical waves
near the sound source contains real and imaginary components, Figure 21 and (163).
For radial distances far from the acoustic origin, kr 1 , the imaginary component of the particle velocity
(162) is insignificantly small, and the spherical wave particle velocity is in-phase with the acoustic pressure.
Figure 21 shows this trend that the imaginary contribution of the specific acoustic impedance of spherical
specific acoustic impedance normalized by c
0
waves converges to zero for kr 1 while the real component approaches that of plane waves.
0.8
plane wave
real(spherical wave)
imag(spherical wave)
0.6
0.4
0.2
4
5
6
kr, normalized distance from acoustic source origin
10
Figure 21. Specific acoustic impedance normalized by plane wave specific acoustic impedance.
Comparing plane and spherical acoustic waves, we refer to Table 5.
Table 5. Comparison between plane and spherical acoustic waves
plane waves
radiate in direction
spherical waves
radiate in direction
pressure amplitude is constant as distance
acoustic intensity is proportional to
2
prms
x changes
pressure amplitude decreases as 1 / r
acoustic intensity is proportional to
2
prms
and decreases as
1/ r 2
pressure and particle velocity are in phase
pressure and particle velocity are only in phase for kr 1 ,
and in general are not in phase
the specific acoustic impedance is real
the specific acoustic impedance is real for kr 1 , and in
general is complex
Thus, for point acoustic sources (infinitesimally small radiating spheres), we refer to the acoustic far field
as the location in space where spherical wave characteristics approach those of plane waves, where kr 1
. In the acoustic far field, spherical waves have the following characteristics
the acoustic pressure and the particle velocity are in-phase
the acoustic intensity is in the radial direction r
50
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
the specific acoustic impedance is purely real and equal to 0`c
In general, the acoustic far field refers to a long distance between the receiving point of acoustic
pressure waves and the acoustic wavelength. This is evident by kr 2 r / 2 r / 1 .
3.8 Decibels and sound levels
On a typical day, you may directly encounter many orders of magnitude in acoustic pressure changes. The
human ear can detect acoustic pressures as little as 20 [Pa] and as great as 60 [Pa] (at the point of feeling
actual pain) across the bandwidth of frequency 20 [Hz] to 20 [kHz] which is known as the the acoustic
frequency bandwidth [4].
Table 6 lists a typical range of acoustic pressures for various acoustic sources. This large range of pressures
is difficult to characterize using linear scales, particularly because energy-based acoustic quantities are
proportional to the square of pressure. Thus, in acoustics, we very often use logarithmic scales.
The sound pressure level is defined
SPL 10log10
p2
( 179 )
2
pref
where pref is the reference sound pressure and is often taken to be pref =20 Pa for sound in air. The units
of SPL are decibels [dB], in honor of Alexander Graham Bell, the inventor of the telephone and other
novelties. It is common to refer to this unit phonetically: saying "dee bee". Equation (158) may also be
written using
SPL 20log10
prms
pref
( 180 )
Finally, recall that prms P / 2 where P is the amplitude of the acoustic pressure. The sound pressure
levels for the acoustic sources in Table 6 are given in the right-most column to correspond to the pressures
in [Pa] in the adjacent column. The RMS pressure in (180) may be associated with a single frequency or
may be associated with many frequencies via averaging, more on this matter in the next section, such that
we use (85) to determine the total RMS pressure.
Table 6. Range of acoustic pressures and sound pressure levels (SPL) of various sound sources and distances from them.
Data compiled from https://en.wikipedia.org/wiki/Sound_pressure
Source of sound
Distance
Acoustic pressure [Pa]
Sound pressure
level [dB]
.30-06 rifle being fired
1 m to side
7,265
171
Jet engine
1m
632
150
51
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Threshold of pain
At ear
63-200
130-140
Trumpet
0.5 m
63.2
130
Risk of instantaneous noise-induced hearing loss
At ear
20
120
Jet engine
100 m
6.32200
110140
Jack hammer
1m
100
Traffic on a busy roadway
10 m
0.20.632
8090
Hearing damage (over long-term exposure, need not be continuous)
At ear
0.356
85
Passenger car
10 m
(220)102
6080
EPA-identified maximum to protect against hearing loss and other
disruptive effects from noise, such as sleep disturbance, stress, learning
detriment, etc.
Ambient
6.32102
70
TV (set at home level)
1m
2102
60
Normal conversation
1m
(220)103
4060
Very calm room
Ambient
(26.32)104
2030
Light leaf rustling, calm breathing
Ambient
6.32105
10
Auditory threshold at 1 kHz
At ear
2105
In addition to sound pressure level, we are also often interested in sound power level
L 10log10
ref
( 181 )
where ref =10-12 [W]. A less commonly used sound level is the intensity level
IL 10log10
( 182 )
I ref
where I ref =10-12 [W/m2].
Considering the relations between acoustic pressure, intensity, and power, equations (170), (176), and
(178), the sound levels for spherical waves may be collectively related through the following expressions
L 10log10
I
I ref
10log10 4 r 2
( 183 )
52
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
2
4 r 2 pref
prms
L 20log10
10log10
pref
ref 0 c
( 184 )
SPL 20log10 r 11
Example: What is the SPL of the acoustic pressure in a duct with an end-firing piston harmonically
oscillating with amplitude of displacement D =200 [m], at a frequency f =120 [Hz]? Assume the air
temperature is 20 [C].
Answer: The amplitude of the acoustic pressure is p x, t P 0cD . Using the provided information,
and seeing above that the specific acoustic impedance 0 c of air at 20 [C] is 415 [Pa.s/m], we find that
P 2 415 200 106 0.5215 [Pa]. Thus, the RMS pressure is 0.3687 [Pa]. The SPL is found to be
85.3 [dB]. Note that there is no spreading of acoustic energy for these plane waves and thus the sound The
sound power level L would be computed by a few steps. First, the intensity (160) is I P2 / 20 c . The
sound power is then the intensity multiplied by the area through which the sound propagates, which is the
duct area, say S . Then the sound power level L would be computed from (181).
Example: For a spherical acoustic wave, at 1 [m] the SPL is 80 [dB]. What is the SPL at 2 [m]? At 4 [m]?
Answer: At 1 [m], the pressure amplitude is approximately
ref
2 10SPL /20 0.2828 [Pa]. Considering
(172), the pressure amplitude at 2 [m] will be one-half of what it is at 1 [m], while at 4 [m] the amplitude
will be one-quarter of what it is at 1 [m]. Thus, the corresponding, respectively SPLs will be 74 [dB] and
68 [dB]. It is seen that with each doubling in distance, the SPL for a spherical acoustic wave reduces by 6
[dB] while the pressure is cut in half. Note that by (184), the sound power level L remains the same at all
distances for one source encompassed in a given volume, since the reduction of SPL in (184) is
counterbalanced by the 20log10 r that increases as r increases.
3.8.1
Combining sound pressure levels
Because they are harmonic functions of time, acoustic pressures (171) combine in the same way as
oscillations, see (82) and (85). As shown for the SPL (180) and sound power level L (184), the RMS
pressures are needed in the computation. Thus, the determination of a total SPL or total L due to a
collection of acoustic sources requires a first determination of a total RMS pressure.
Example: Find the total SPL for three incoherent sources that have individual SPLs of 74, 83, and 80 [dB].
Answer: The individual RMS pressures corresponding to these SPLs are
74 20log10
prms
prms =0.1002 [Pa]
20 106
53
RL Harne
ME 5194, Eng. Acoust. 2016
83 20log10
prms
prms =0.2825 [Pa]
20 106
80 20log10
prms
prms =0.2000 [Pa]
20 106
The Ohio State University
1/2
The total RMS acoustic pressure is then found using (85): prms ,total 0.10022 0.28252 0.20002
=0.3603 [Pa]. Therefore, the total SPL is
SPLtotal 20log10
0.3603
85.1 [dB]
20 106
54
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Elementary acoustic sources and their sound propagation characteristics
Although many important contexts involve plane acoustic waves, such as sound propagation in ducts, by
and large the predominant type of acoustic energy sources generate spherical waves. The spreading of
spherical waves according to the distance r from an origin or source distinguishes this wave type from
plane waves. As a result, sound-spreading phenomena are critical to identify and understand. This section
explores the characteristics of elementary acoustic sources that generate spherical waves.
4.1 Monopole and point acoustic sources
The general solution (165) to the acoustic wave equation assuming symmetrically spreading spherical
waves is repeated again here for convenience
p r, t
A j t kr
e
r
( 185 )
Consider that a sphere of radius a harmonically oscillates in its radial direction with a velocity of Ue jt ,
Figure 22, and therefore has a displacement amplitude U / . This acoustic source is called the monopole.
Imagine this to be a spherical balloon being expanded and contracted uniformly in the radial dimension
according to the period 2 / . To satisfy the boundary condition at the sphere surface, the particle velocity
of the acoustic fluid must be equal to the surface normal velocity of the sphere, which is everywhere U .
Therefore, we have that
1 p a, t
u a, t 1 j
Ue jt
ka 0 c
1 A j t ka
1 j
e
Ue jt
ka a 0 c
A 0 cU
( 186 )
jka 2 jka
e
1 jka
( 187 )
Consequently, the pressure field generated by a monopole is
p 0 c
U jka 2 j t k r a
e
r 1 jka
( 188 )
By substitution, the particle velocity is
u r, t a
U j t k r a
e
r
( 189 )
jt
Note that (189) meets the boundary condition that r a , we have u a, t Ue . Note also that (188) is
only valid r a . This is similar to the general form of spherical wave pressure (171) that is only valid for
r 0.
55
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 22. Monopole in spherical coordinate system showing location vector r denoting point (grey) in field.
At distances satisfying ka 1 , which is equivalent to 2 a / 1 , the pressure is
p j 0 c
U
ka ae j t kr
r
( 190 )
1 p r, t
while the particle velocity is u r , t 1 j
in the general case as repeated from (166).
kr 0 c
1
Repeating (161), the time-harmonic acoustic intensity is I Re pu* . Because there is only one acoustic
2
source in the field, here the intensity is always in the radial direction, is spherically symmetric, and is the
same when averaged over one period of pressure fluctuation. Thus, the vector notation can be dropped for
the average intensity expressed as I
1
2
2
0 cU 2 a / r ka . The acoustic intensity and pressure and
2
particle velocity of the monopole are presented in Figure 23. It is seen that close to the source, the particle
velocity and pressure are not in-phase (bottom inset), while considerably further away from the monopole
these two quantities gradually become in-phase (top inset). This is in agreement with the prior discussion
from derivation in Sec. 3.7. The MATLAB code used to generate Figure 23 is given in Table 7. As described
56
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
acoustic intensity, black. acoustic pressure, red. acoustic velocity, blueacoustic intensity, black. acoustic pressure, red. acoustic velocity, blue
0.06
2
0.04
0.02
y axis [m]
1.5
1
-0.02
y axis [m]
0.5
-0.04
-0.06
1.65
1.7
1.75
x axis blue
[m]
acoustic intensity, black. acoustic pressure, red. acoustic velocity,
0.08
-0.5
0.06
0.04
-1
y axis [m]
0.02
-1.5
-0.02
-0.04
-2
-0.06
-1.5
-1
-0.5
0.5
1
1.5
x axis [m]
-0.08
20.48
0.5
2.50.52
0.54
0.56
x axis [m]
3.5
0.58
0.6
0.62
0.64
Figure 23. Plot of particle velocity, acoustic pressure, and intensity for a monopole point source. The insets show how
the pressure and particle velocity either are or are not in phase at certain distances from the source. The plots are offset
by small values in the y-axis for ease of visualization.
in Sec. 3.7, in the limit that kr 1 we have the condition of the acoustic far field. Note that kr is a nondimensional parameter. When more than one source is considered, as described below, there is another nondimensional parameter of importance to take into account in the modeling of acoustic field generation.
Table 7. MATLAB code to generate Figure 23.
clear all
theta=linspace(-90,90,31)*pi/180; % [rad]
omega=3e2*2*pi; % [rad/s]
c=343; % [m/s]
r=c/(omega/2/pi)*linspace(.1,2,81); % [m]
rho_0=1.125; % [kg/m^3] density
k=omega/c; % [1/m] wavenumber
a=.01; % [m] radial dimension of monopole
U=1e-2; % [m/s] oscillation velocity of monopole
x=zeros(length(theta),length(r));
y=x;
pressure=j*rho_0*c*U./r*k*a*a.*exp(j*(-k*(r))); % [Pa]
velocity=(1-j*1/k./r).*pressure/rho_0/c; % [m/s]
for iii=1:length(theta);
for jjj=1:length(r)
57
1.8
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
x(iii,jjj)=r(jjj)*cos(theta(iii)); % x unit vector
y(iii,jjj)=r(jjj)*sin(theta(iii)); % y unit vector
pressure_x(iii,jjj)=pressure(jjj)*cos(theta(iii));
pressure_y(iii,jjj)=pressure(jjj)*sin(theta(iii));
velocity_x(iii,jjj)=velocity(jjj)*cos(theta(iii));
velocity_y(iii,jjj)=velocity(jjj)*sin(theta(iii));
intensity_x(iii,jjj)=1/2*real(pressure_x(jjj)*conj(velocity_y(jjj)))*cos(theta(iii));
intensity_y(iii,jjj)=1/2*real(pressure_x(jjj)*conj(velocity_y(jjj)))*sin(theta(iii));
end
end
figure(1);
clf;
quiver(x,y-1e-3,intensity_x,intensity_y,'k');
hold on
quiver(x,y,real(pressure_x),real(pressure_y),'r');
quiver(x,y+1e-3*ones(size(y)),real(velocity_x),real(velocity_y),'c');
axis equal
xlabel('x axis [m]');
ylabel('y axis [m]');
title('acoustic intensity, black. acoustic pressure, red. acoustic velocity, blue');
For monopole sources oscillating with acoustic wavelengths sufficiently greater than their radial dimension
a such that a / 1 , the result of (190) holds while we moreover term these sources point sources. Rather
than strictly define these sources according to their radial dimension, the important parameter to consider
is ka which is a non-dimensional ratio of the source size and acoustic wavelength.
Note that the general expression of (185) applies in the case of (188) and (190), that the complex amplitude
A is an amplitude adjustment with respect to the actual source dimensions and oscillation amplitude, and
that the pressure is 90 out-of-phase with the sphere surface velocity. Thus, in general, we determine
relations for the point source acoustic wave radiation of
p
A j t kr
e
r
( 191 )
which is identical to (171) when there is no phase difference for the consideration of a reference starting
time and the oscillation of the pressure, thus A A .
4.2 Sound fields generated by combinations of point sources
Consider the two point sources arranged as shown in Figure 24(a). The unit vectors e1 and e2 respectively
denote the vectors extending from the point sources 1 and 2 to the field point where we seek to determine
the acoustic pressure p . Note that the schematic of Figure 24(a) can represent two point sources that are
not necessarily in the same location in the z axis (out-of-page) through the definition of the arbitrary unit
vectors.
58
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 24. Two point sources radiating sound pressure to a field point.
Here, we deal with the linear acoustic wave equation without boundaries in the field (the free field), such
that the total acoustic pressure at the field point is simply the superposition of acoustic waves arriving at
the point due to any number of sources at other locations. The corresponding statement regarding the
particle velocities associated with each source is true: the total is the summation of the individual
components. To determine the pressure at the field point, several factors must be defined about the sources.
We must identify if the sources are creating acoustic pressure at the same or different frequencies. If they
are radiating pressure at the same frequency (termed coherent or correlated) then we must identify the
relative phase difference of the sources. Knowing these characteristics, we must then know the location of
the sources with respect to the field point.
Example: Consider the arrangement shown in Figure 24(b). Given that r1 =2.3 [m] and r2 =1.4 [m],
determine and plot the time-harmonic sound pressure p Re p at the field point indicated when the two
point sources at 2 [kHz] are (a) perfectly in-phase and (b) perfectly out-of-phase. Assume that the SPL of
point source 1 is 77 [dB] and the SPL of point source 2 is 79 [dB]. Assume the fluid is air at a temperature
of 20 [C].
Answer: We must first determine the sound pressure amplitudes of the point sources. Using (180), we have
that P1 =0.2002 [Pa] and P2 =0.2521 [Pa]. Therefore, we have that
P
P
P
p Re p1 p2 Re 1 e j t kr1 2 e j t kr2 Re 1 e jkr1 2 e jkr2 e jt
r2
r2
r1
r1
(a) When the sources are in-phase, we can expand the component of the equation in brackets as
P1
P
cos kr1 j sin kr1 2 cos kr2 j sin kr2
r1
r2
Then we have
P
P
p Re 1 cos kr1 j sin kr1 2 cos kr2 j sin kr2 cos t j sin t
r2
r1
59
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
P1
P
cos kr1 cos t sin kr1 sin t 2 cos kr2 cos t sin kr2 sin t
r1
r2
From Appendix A10 [10], the sound speed in air is 343 [m/s]. Putting the results together and combining
terms, we have that
p 0.01952cos 2 2000t 0.2001sin 2 2000t
when the sources are in-phase. Using a vectorial expression, we express this via
p P Re e j t
where P 0.019522 0.20012 0.2010 [Pa] and tan 0.2001/ 0.01952 .
(b) When the sources are out-of-phase, the expression from above is modified only by applying a leading
negative sign to one of the sources, such as
p
P1
P
cos kr1 cos t sin kr1 sin t 2 cos kr2 cos t sin kr2 sin t
r1
r2
This results in
p 0.1672cos 2 2000t 0.1078sin 2 2000t
that is put into a vector form as above such that P =0.1989 [Pa] and =-147. Comparing the SPLs of inand out-of-phase, we find that SPLin =77.0 [dB] and SPLout =76.9 [dB]. It is interesting to note that despite
the summation of two sources, where one has an SPL of 79 [dB], the combination of the sources does not
add up to a level that exceeds 79 [dB]. Considering a plot of the time series of the addition and subtraction
of the pressures shows that they are nearly in quadrature which is to say almost 90 out-of-phase based on
their distance from the field point and the frequency under consideration. Therefore, the two sources neither
constructively nor destructively interfere to a significant extent.
p1, black solid. p2, red dashed. real(p1+p2), blue dash-dot
p1, black solid. p2, red dashed. real(p1-p2), blue dash-dot
0.25
0.2
0.2
0.15
0.15
0.1
0.1
0.05
0.05
pressure [Pa]
pressure [Pa]
0.25
0
-0.05
0
-0.05
-0.1
-0.1
-0.15
-0.15
-0.2
-0.2
-0.25
-0.25
0.2
0.4
0.6
0.8
1
time [s]
1.2
1.4
1.6
1.8
-3
x 10
Figure 25. Time series of the acoustic pressure from the example.
60
0.2
0.4
0.6
0.8
1
time [s]
1.2
1.4
1.6
1.8
2
-3
x 10
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
In general, as indicated in Sec. 2.9, combining the common sinusoidal components of acoustic pressure is
undertaken according to linear superposition, via
p pi and p Re p
( 192 )
Likewise
u ui and u Re u
( 193 )
In this way, we may compute the acoustic intensity via (161), repeated here again for convenience
I
1
Re pu*
2
4.2.1
( 194 )
Directivity in geometric and acoustic far field acoustic wave radiation
Consider the arrangement of point sources along a y -axis as shown in Figure 26. The angle refers to the
angle between the normal to the y -axis and the field point. Although it is more appropriate in threedimensions as a nomenclature, we will refer to the angle as the elevation angle and denote =0 to be
called broadside.
When the distance between the point sources 1 and 2 is small with respect to the distance to the field point,
d r , the effective distances of sources 1and 2 to the field point are respectively r
d
sin
2
and
d
sin . The condition r d (alternatively, r / d 1 ) is referred to as the geometric far field.
2
In general, the geometric far field refers to a long distance between the receiving point of acoustic
pressure waves and the characteristic dimension of the source.
Figure 26. Two point sources exciting acoustic waves at the same frequency as transmitted to the field point.
Given that the two sources are driven with the same amplitude of pressure A and at the same angular
frequency , the acoustic pressure at the field point is
61
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
p p1 p 2
A j t kr j
e e j
e
r
A
2 e j t kr cos
r
( 195 )
where kd / 2 sin is half the difference in phase between the acoustic waves transmitted from the two
sources. We can express (195) as
p 2D
A j t kr
e
r
( 196 )
where D cos kd / 2 sin is referred to as the directivity -- also termed directivity function,
directional factor, and beam pattern -- here of the two-point source array, where the term array denotes
more than one coherent source projects acoustic waves to a field point. The directivity can vary from 0 to 1
as a function of the elevation angle, excitation frequency (via the wavenumber), and the distance between
the two sources. Since kd is a non-dimensional parameter that represents the ratio of the point sources
separation (times 2 ) to the acoustic wavelength, it is logical to investigate the roles that this parameter
plays on determining the directivity. For arrays distributed in planes and three-dimensional surfaces, rather
than only in the line considered here, the directivity D 0,1 will be a function of other angular coordinates
of the field point with respect to the geometric center of the acoustic source array.
Figure 27 presents results of the directivity for the values of kd 0.25,2,4,10 , plotted in [dB] via
10log10D (not 20log10D=10log10D2 because directivity is not a mean-squared quantity). Note that a plot of
the directivity directly enables us to identify the change in SPL as a function of parameters kd and since
SPL values are only otherwise tailored by the leading constants given for the pressure expression in (196).
The plot at left in Figure 27 shows that for values of kd less than 1, the radiated sound pressure exhibits
no dependence upon change in the elevation angle (blue curve). For kd slightly greater than 1 (green
curve), the response begins to exhibit a directive propagation towards broadside, that is there is a reduction
in the directivity of about 2.5 [dB] for elevation angles +/- 90 that gradually develops for increasing values
from 0 elevation angle. This directive response becomes exaggerated as kd is more substantially greater
than 1. For the red curve kd =4, there is a major lobe that is centered on broadside =0. On both sides of
62
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
kd=0.25, blue. kd=2, green. kd=4, red. kd=10, cyan
90
kd=0.25, blue. kd=2, green. kd=4, red. kd=10, cyan
60
30
-2
directivity [dB]
40
120
20
150
-4
30
10
-6
180
-8
-10
-12
-80
-60
-40
-20
0
20
elevation angle [degrees]
40
60
80
210
330
240
300
270
Figure 27. Directivity plots of two-point source array with sources in-phase at the same frequency. The right-most plot
is generated using the polar command in MATLAB and artificially adding 40 [dB] to the directivity because negative
values in polar plots result in strange plotting behaviors. The yellow circles in the right-most plot are representative of
the locations of the sources.
the lobe, there are pressure nodes where the directivity drops off by more than 12 [dB], creating effective
zones of silence for field points around +/- 50. The term node denotes a substantial reduction in the
pressure, similar to the nodes of vibration modes of distributed structures. For kd >>1, the example of kd
=10 (cyan curve) shows that more pressure nodes appear, each stood off by side lobes that are angular
regions of large sound pressure level.
Ordinarily, due to the elevation angle dependence (or multi-angle dependence), directivity plots are
typically shown in spherical coordinates to accommodate the logical presentation. For the case of study
from Figure 26, there is azimuthal angle symmetry, such that the two-dimensional representation of
directivity can take advantage of the polar plot command in MATLAB. The right-most plot of Figure 27
shows one such plot of directivity. This is the same data as in the left-most plot, but there is a more intuitive
understanding of the trends. According to MATLAB's convention, no distinction is made between the
negative elevation angle values and the wrapping of 2 phase, which explains the designation of elevation
angles
90,0 270,360 . The code used to generate Figure 27 is provided in Table 8. Note that the
directivity presented in the polar plot of Figure 27 is symmetric with respect to the y -axis of the plot,
although only the portion spanning 90,90 is presented. Considering Figure 27, a more intuitive
presentation of the directivity shows that at broadside =0 each case of kd results in a maximum of
acoustic pressure: a major lobe. On the other hand, some cases of kd such as kd =4 lead to large major
lobes separated by a pressure node after which, for further increases in the elevation angle to +/- 90 a
substantial sidelobe occurs which leads to large SPL in the far field when the observing field point is
oriented along the axis of the array. This condition is called the end-fired array.
63
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Table 8. MATLAB code used to generate Figure 27.
kd=[0.25 2 4 10]; % [nondimensional]
theta=linspace(-90,90,401)*pi/180; % [rad]
D=zeros(length(theta),length(kd));
for iii=1:length(kd)
D(:,iii)=cos(kd(iii)/2*sin(theta));
end
figure(1);
clf;
plot(theta*180/pi,10*log10(abs(D)));
xlabel('elevation angle [degrees]');
ylabel('directivity [dB]')
xlim([-90 90]);
ylim([-12 0]);
box on
title('kd=0.25, blue. kd=2, green. kd=4, red. kd=10, cyan');
figure(2);
clf;
addthis=40;
polar(theta,10*log10(abs(D(:,4)))'+addthis);
hold on
polar(theta,10*log10(abs(D(:,1)))'+addthis);
polar(theta,10*log10(abs(D(:,2)))'+addthis);
polar(theta,10*log10(abs(D(:,3)))'+addthis);
title('kd=0.25, blue. kd=2, green. kd=4, red. kd=10, cyan');
4.3 Source characteristics
We see from (196) that the pressure amplitude may be expressed using p Pax r D . This indicates
that the amplitude of the acoustic pressure for the combined source can be considered as the product of a
component proportional to the far field axial pressure Pax r and a component related to the source
directivity D . For the two, correlated, in-phase point source system, the axial pressure component is
Pax r 2
A
, where A may be found from Re A such as when the points are very small monopoles
r
(197). The directivity for the two, in-phase point source system is D cos kd / 2 sin .
4.4 Dipole acoustic sources
Another important case occurs when the two sources are correlated (at the same frequency, also termed
coherent) but oscillate out-of-phase. Consider again Figure 26 but now the point sources oscillate out-ofphase. By a similar derivation as above with r / d 1 , we have that
p p1 p 2
A j t kr
e j e j
e
r
A
2 j e j t kr sin
r
( 197 )
64
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
kd=0.25, blue. kd=2, green. kd=4, red. kd=10, cyan
90
30
120
60
kd=0.25, blue. kd=2, green. kd=4, red. kd=10, cyan
20
150
30
-5
10
directivity [dB]
-10
180
-15
-20
210
-25
-30
-80
-60
-40
-20
0
20
elevation angle [degrees]
40
60
80
330
240
300
270
Figure 28. Directivity plots of doublet source. The right-most plot is generated using the polar command in MATLAB
and artificially adding 30 [dB] to the directivity levels. The yellow circles in the right-most plot are representative of
the locations of the sources.
where again kd / 2 sin . The source that exhibits the pressure field given by (197) is referred to as
the doublet source. If we consider that kd 1 , which is a manifestation of the fact that the frequency under
consideration has an acoustic wavelength that is very long with respect to the separation between the outof-phase sources, then the pressure given by (197) may be simplified to (by small angle assumption)
p2j
A j t kr
e
kd / 2 sin
r
( 198 )
The acoustic source that exhibits the pressure field given by (198) is referred to as the dipole source.
There are numerous examples of dipole sources, including unbaffled loudspeakers at low frequencies,
axially rotating fans, air flow over an automotive spoiler (or many such vortex-shedding aeroacoustic events
in general), and the oscillation of a tuning fork prong. The shared feature of these sources is that they
provide an increase in acoustic pressure on one side and decrease in pressure on the other, which at low
frequencies results in an oscillation of pressure back and forth at the source location. Thus an insignificant
propagation of energy into the far field occurs along the axis normal to the array characteristic length.
Figure 28 presents directivity plots of the doublet source. For kd =0.25 (blue curves), the result is
conventional of the dipole since the acoustic wavelength is sufficiently large with respect to the two-source
spacing. Thus, in the far field, the directivity at broadside =0 (normal to the x -axis) is almost zero. Such
a trend applies to all of the frequencies considered according to the parameter ratio kd : far field sound
radiation to broadside is ineffective with doublet sources. This is intuitive because the pressure increase by
one source is negated by the pressure decrease of its neighboring source when one considers positions in
spacing along the radial axis for =0.
65
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
4.5 Reflection: method of images
When a source of spherical acoustic waves is positioned near to an acoustically hard plane (also called
reflective or rigid), sound waves are reflected without significant loss. Acoustically hard material surfaces
include unpainted cinder block, tile, solid concrete, and glass, to name a few. A few examples of common,
highly reflective acoustic environments are gymnasiums, public restrooms (lots of tile, easy to clean with
harsh chemicals), and parking lots (a highly reflective plane).
Figure 29 provides a schematic of the scenario that point source 1 is positioned a distance z d from an
acoustically hard surface, and we are trying to determine the total acoustic pressure at the field point. The
acoustic pressure at the field point due to the direct line-of-sight transmission of the wave from point 1
(solid red curve) is
pd
A j t kr
e
r
( 199 )
where the radial distance is
1/2
r z d y 2 x 2
( 200 )
where we have included both the dimensions x and y for the sake of completeness although we are
assuming by the notation here that the source and field points are at y =0. The subscript d denotes that this
is the direct or line-of-sight wave.
Now, because the normal component of the particle velocity due to the point source 1 must vanish at the
plane defined by x, y,0 -- otherwise the rigid surface would move -- we can introduce a second point
source (image 1) at a location z d that is identical in amplitude and phase as the point source 1. By so
doing, it is easy to show that the normal component of the particle velocity of point source 1 appropriately
vanishes on the plane x, y,0 . Thus, the image source 1 provides a pressure to the field point of
pr
A j t kr
e
r
( 201 )
and is a distance
1/2
r z d y 2 x 2
( 202 )
from the field point. The subscript r for the pressure denotes that this is a reflected component.
Therefore, when a point source is near to an acoustically reflective plane by normal distance + d , the total
sound pressure received at a field point can be computed from the combination of the direct, line-of-sight
sound pressure received from the point source and from an image, in-phase source of equal pressure
magnitude and phase located a normal distance - d from the reflective plane. The combination of sources
exactly eliminates the normal component of particle velocity for the point source 1, which is necessary
66
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
according to the physics of the acoustically rigid (and unmoving) surface. This strategy for sound field
mapping is referred to as the method of images.
Figure 29. Total sound pressure at a field point due to a spherical acoustic source placed near an acoustically hard surface.
An application of the method of images.
Several important observations are made as a result of applying the method of images. Continuing the
derivation of the total acoustic pressure received at the field point, we find that the total acoustic pressure
at the field point is
1
p p d p r A e jkr e jkr e jt
r
r
( 203 )
When the field point distance r is sufficiently greater than d cos , which indicates a geometric far field
condition, the trigonometry of (203) may be simplified to yield
r d sin
r r r
( 204 )
r r r
As a result, (203) is written
A j t kr e jk r
e jk r
p r , , t e
r
r
r
1
1
r
r
( 205 )
Considering that we are now interested in the geometric far field, r r such that the ratios in the
denominators can be neglected when compared to 1. Then, applying Euler's identity to the remaining
exponential terms, we arrive at
p r , , t 2
A j t kr
e
cos kd sin
r
( 206 )
67
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
We note that (206) for one source near a reflecting plane is identical to (195) for two point sources in the
free field. [Note that in (206) d is half the separation distance between sources, whereas in (195) d is the
total separation distance]. We also note that (206) is valid for 0, [rad] but is invalid for ,0
[rad]. Thus, the method of images is an approach for recreating the sound field only in the actual acoustic
domain but not within the reflecting domain.
An important new observation is made considering the reflected acoustic pressure from the acoustically
rigid surface. Note that there is only one source of acoustic pressure but that the total sound pressure at the
field point may be as much as twice the amplitude of pressure provided by the incident wave itself. As a
result, the directivity characteristics shown in (206) are the same as those for the two point source scenario
(196). Example contours of equi-sound pressure level are shown in Figure 30 while the code used to
generate these results is provided in Table 9. For values of kd around 1, the point source positioned near
the reflecting plane becomes strongly directional in terms of propagating waves effectively along the plane
surface, =0. For higher kd values, the delivery of sound energy can also be directional at higher angles
>0.
Recall from Sec. 4.1 that the far field ka 1 intensity of a point source is
I
1
2
2
0 cU 2 a / r ka
2
( 207 )
where U is the oscillating velocity of the sphere of radius a . Here, because the point source near the
reflecting plane provides an amplitude of acoustic pressure that is twice that of the point source in the free
field, we may express that U e 2U , which leads to the discovery that the intensity from the point source
near the reflecting plane is 4 times that of the same point source in the free field.
68
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Recall that the acoustic power is the sound energy per time radiated by an acoustic source. Considering a
hemisphere enclosing the source, the acoustic power is I ndS . For a point source in the free field,
S
we simply have that 4 r 2 I while for the point source near the reflecting plane we have e 2 r 2 I e .
Taking the ratio of these two powers shows that
e 2 r 4 I
4 r 2 I
2
( 208 )
the acoustic power radiated by a source near a reflecting plane in the acoustic far field -- ka 1 , kd 1
-- is twice that of the same acoustic source in the free field.
Consider the limiting case of the above such that the point source is gradually brought closer to the plane
and d 0 . In this way, the constraint kd 1 is more easily met such that when the source is on the plane,
the above result is automatically obtained. In other words, one can double the radiated sound power merely
by mounting an acoustic source into a hard rigid plane. This is called baffling (and the plane called a
baffle). The above discovery is the reason why speakers are mounted into rigid cabinets: they are more
effective low frequency sound radiators (where "low" is of course relative to the speaker size).
Table 9. MATLAB code used to generate Figure 30.
clear all
kd=[0.4 .8 1.6 3.2]; % [nondimensional]
theta=linspace(0,180,101)*pi/180; % [rad]
r=linspace(0.05,1,51);
omega=2e3; % [rad/s]
c=343; % [m/s]
p_ref=20e-6; % [Pa]
d=0.01; % [m]
SPL [dB re 20uPa] for kd = 0.8 and A = 0.05
SPL [dB re 20uPa] for kd = 0.4 and A = 0.05
0.8
0.8
95
95
0.6
0.6
90
z [m]
z [m]
90
0.4
85
0.4
85
0.2
0.2
80
80
75
-1
-0.5
0
x [m]
0.5
-1
-0.5
0
x [m]
0.5
SPL [dB re 20uPa] for kd = 3.2 and A = 0.05
SPL [dB re 20uPa] for kd = 1.6 and A = 0.05
1
90
80
0.8
90
0.8
70
80
0.6
60
0.4
z [m]
z [m]
0.6
50
40
0.2
70
0.4
60
0.2
30
0
-1
-0.5
0
x [m]
0.5
0
-1
50
-0.5
0
x [m]
0.5
Figure 30. Contours of equal sound pressure level for the point source positioned near to an acoustically rigid plane
69
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
k=kd/d; % [1/m]
A=0.05; % [Pa]
for iii=1:length(theta)
for jjj=1:length(r)
x(iii,jjj)=r(jjj)*cos(theta(iii)); % location in x axis
y(iii,jjj)=r(jjj)*sin(theta(iii)); % location in y axis
for ooo=1:length(kd)
p(iii,jjj,ooo)=2*A/r(jjj)*cos(kd(ooo)*sin(theta(iii)));
end
end
end
figure(1);
clf;
for iii=1:length(kd)
subplot(2,2,iii)
contour(x,y,20*log10((real(squeeze(p(:,:,iii))))/p_ref),10);
xlabel('x [m]');
ylabel('z [m]');
axis equal
colorbar
title(['SPL [dB re 20uPa] for kd = ' num2str(kd(iii)) ' and A = ' num2str(A) '']);
end
The method of images can be extended to cases of greater number of reflecting number of planes, such as
the example shown in Figure 31 where two reflecting planes are involved. In Figure 31, similarly colored
angle markers have equal angle value according to the law of reflection. In total, Table 10 provides a
summary of the various ways in which point sources may be configured and baffled with respect to
acoustically rigid planes so as to enhance the sound power provided by the source to the acoustic far field.
Figure 32 illustrates each of the scenarios featured in Table 10. Thus, based on the development for a point
source positioned near a single reflecting plane and gradually drawing near to it so as to enhance the sound
power radiation for all frequencies (of wavelength sufficiently greater than the source dimension), it is clear
that the position of sources of sound with respect to rigid surfaces is of utmost importance towards their
effectiveness in radiating acoustic energy to distant locations in space.
70
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 31. Method of images applied for a point source near to two reflecting planes. The colored arrow pairs denote that
angles of the reflecting waves are symmetric.
Table 10. Summary of influence of rigid baffles on the radiation of sound with illustrations of the scenarios shown in Figure
32.
Scenario
Multiples of acoustic pressure
amplitude and sound power with
respect to free field radiation
(equivalent [dB] additive change in
Multiples of acoustic intensity with
respect to free field radiation
SPL and L )
(a) Free field
1 (0)
(b) Point source mounted in rigid
baffle/plane
2 (6)
(c) Point source at intersection of two
rigid baffles
4 (12)
16
8 (18)
64
(d) Point source at a corner of three
rigid baffles
71
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 32. Acoustic sources in various configurations with respect to rigid baffles (or reflecting planes) positioned for sound
power radiation enhancement.
4.6 Sound power evaluation and measurement
Based on the prior developments, a source of sound (e.g., engine, appliance, machine) may be examined as
representing numerous point sources over the source surface in such close proximity that they radiate as a
single system-level source, Figure 33. In other words, at distances far from the source center, the fact that
sound radiation may emanate from several key surfaces or features does not so much as matter as the fact
that all of these wave-radiating elements contribute to one system-level production of sound power.
From this concept, we may determine the total radiated sound power from any given source of sound.
Consider that the maximum characteristic dimension of the source is d , which may be the longest diagonal
measurement of the object, such as that shown in Figure 33. Then, to determine the sound power radiated
from this source, we measure the SPL at locations in the acoustic field around the source when placed on a
reflecting plane. No reflections from the surroundings may occur to interfere with the SPL measurements.
This means that measurements must be taken in an anechoic chamber or in another location (such as
outdoors) where reflections can be minimized. The hemisphere must have radius r selected such that the
SPL measurement is in the far field respecting the physical size of the source. The equation for determining
this radial distance is [4]
72
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
d2
2
( 209 )
The (209) reflects the fact that spherically radiating waves require a finite distance to travel before their
reduction in pressure amplitude follows the 1 / r proportionality characteristic of far field sound radiation.
Recalling the other far field criteria, we must also select the hemisphere radius r to meet
acoustic far field kr 1 and geometric far field r / d 1
( 210 )
Example: To evaluate the SPL in the octave band centered on 1 [kHz], find the radius r of measurement
hemisphere around a source with characteristic dimension d of 250 [mm] such that the SPL measurements
will be in the far field. Repeat the method with a characteristic dimension d of 150 [mm].
Answer: Express the three far field criteria for sources of sound with finite size.
2
d 2
0.25
r max
0.286
2 2 343 / 1000
1 343 / 1000
0.0546 d 0.25 [m]
k 2
2
( 211 )
In general, a conservative target to satisfy the inequality >> would be 10 times but this may not always be
possible. Sometimes 5 or 6 times the maximum of the above dimensions must be tolerated with the
recognition that severely directional sounds emanating from the source may distort the measurements. In
this case given in (211), the limit on the selection of the radius r is due to the source size with respect to
the wavelength.
If the source dimension is d of 150 [mm], we have
2
d 2
0.15
1 343 / 1000
r max
0.103
0.0546 d 0.15 [m]
k 2
2
2 2 343 / 1000
( 212 )
In this case given in (212), the limit on the selection of the radius r is due to the geometric far field criterion.
73
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 33. An arbitrarily-shaped source of sound, with a maximum characteristic dimension of d . A hemisphere around
the source, positioned on a reflecting plane with microphone locations for measuring SPL to determine the radiated sound
power level
L . The radius of the hemisphere is r .
Table 11. Semi-free field measurement locations by ANSI SI.34-1980 for SPL evaluation.
Coordinates as multiples of radius r
microphone number
1
2
3
4
5
6
7
8
9
10
-0.99
0.50
0.50
-0.45
-0.45
0.89
0.33
-0.66
0.33
0
0
-0.86
0.86
0.77
-0.77
0
0.57
0
-0.57
0
0.15
0.15
0.15
0.45
0.45
00.45
0.75
0.75
0.75
1
Once the appropriate radius of the measurement hemisphere is determined, the total SPL of the source may
be measured by acquiring the SPL in narrowband or (one-third) octave bands (see Sec. 5.3) over the
hemisphere according to the measurement locations provided in Table 11. The points are determined
according to several standards, including ISO 3745-2012, AS1217.6-1985, which provide each
measurement location an equal-area coverage for the radiated sound.
Recalling (184)
L SPL 20log10 r C
( 213 )
the constant C was given to be 11 [dB] since the spherical acoustic waves were presumed to radiate into
the free field in all directions. However, if the source of sound is near to reflecting planes, the constant C
is defined differently, as shown in Table 12. When the total SPL measurements are taken over a hemisphere
74
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
on a single reflecting plane, the constant is C =8 [dB]. The SPL denoted in (213) is the area-averaged, total
SPL, whether evaluated in narrowband or (one-third) octave bands, according to
SPLave 10log10
1 N SPLi /10
10
N i
( 214 )
Since the points given in Table 11 are selected so as to represent an equal area, there is no need to account
for area in the sum (214).
Based on the procedure outlined above -- identification of the correct hemisphere size, measure the areaaveraged SPL, and account for reflecting planes -- the test scenario may be conducted in a variety of
locations. A common means to conduct the experiments is outdoors or in hemi-anechoic chambers where
one reflecting plane is present and incoming sources of sound to a measurement microphone are negligible
enough that they do not interfere with the SPL measurements from the acoustic source of interest at the
center of the hemisphere.
Table 12. Measurement considerations for determining sound power level from SPL measurements over hemisphere or
part thereof around a source of sound.
constant C [dB]
source location
x, y, z x, y,0
near junction of two planes defined by x, y, z x,0,0
near junction of three planes defined by x, y, z 0,0,0
near plane defined by
5
2
Example: Determine the sound power [W] radiated by a source at 3 [m] in the 500 [Hz] octave band using
the microphone measurements of SPL are provided in Table 13.
Table 13. Measurements of SPL at microphone locations around a hemisphere of a sound source in the 500 [Hz] octave
band.
microphone number
1
2
3
4
5
6
7
8
9
10
SPL [dB]
60
60
65
55
61
61
62
55
64
61
Answer: We use (214)
SPLave 10log10
1 N SPLi /10
=61.3 [dB]
10
N i
75
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Then, by (223) and observing that we have C =8 [dB] and r =3 [m], we find the sound power level to be
L 61.3 20log10 3 8 =78.9 [dB re 10-12 W]
Then, determining the sound power, we have, from (181), =0.0776 [mW].
4.7 Additional wave propagation phenomena
4.7.1
Doppler effect
A well-known phenomenon called Doppler shift or the Doppler effect pertains to the distortion of acoustic
pressure wave frequency due to moving sources or receivers of sound. Consider the situation shown in the
schematic of Figure 34. The relation for the perceived sound frequency f of a periodic pressure wave
occurring with a frequency f 0 is f c Vr f0 / c V where Vr is the relative velocity of the receiver
(person in the Figure 34) to the medium, c is the sound speed of the acoustic fluid, and V is the source
relative velocity to the medium. These relative velocities are given as
Vr , positive if the receiver moves toward the source (and negative if the receiver moves away from the
source)
V , positive if the source moves away from the receiver (and negative if the source moves toward the
receiver)
From this relation, for a fixed receiver location, the frequencies of incoming and outgoing sound sources
directly at the receiver location are respectively heard at higher and lower frequencies by the receiver, with
the new incoming/outgoing frequencies computed by the relation in the paragraph above. But, we do not
ordinarily experience this effect of two distinct frequencies for incoming and outgoing sound sources.
Instead, our experience with the Doppler effect is often a smooth variation in frequency from a low to high
frequency as the sound source passes by, such as a siren from an emergency vehicle. This is because sound
sources do not pass immediately through us as they transition from incoming to outgoing; instead sound
sources pass by at a distance. Therefore, the effective source velocity to use in the relation is Vs ,e Vs cos
where is the angle between the sound source forward velocity and the line of sight from the source to
the receiver.
It must be emphasize that mean fluid flow does not cause Doppler shift. This is because both source and
receiver exhibit the same deviation of velocity with respect to the fluid medium by virtue of a mean fluid
flow. Thus, wind does not cause Doppler shift.
76
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 34. Illustration of Doppler effect in time and space domain, re-drawn from that shown in [22].
4.7.2
Diffraction of sound
Sound undergoes diffraction around objects. Diffraction is a phenomenon associated with wavefronts
approaching edges that result in an edge-radiation effect. A plane wave incident upon a rigid barrier will
not pass through to the other side, by virtue of the assumption regarding rigidity. This creates an acoustic
shadow on the other side of the barrier. But most barriers are finite in one or another dimension. And at
smaller and smaller length scales, there must be continuity of pressure and particle velocity near edges of
barriers. So an acoustic shadow around a barrier edge cannot be complete.
Consider Figure 35 which provides a schematic of the problem. The barrier creates a shadow in some
regions opposing an incident plane wave, but diffraction occurs at the edge, which is similar to the creation
of an edge-based source of sound. The theory of diffraction is associated with Fresnel and Huygens, and is
well beyond the scope of this course; a complete mathematical treatment of diffraction of acoustic waves
may be found in Ref. [12].
Figure 35. Illustration of diffraction at high (at left) and low (at right) frequencies.
But we satisfy our understanding of diffraction based on the principles of the phenomenon. As shown in
Figure 35, the influence of diffraction depends on the wavelength of sound with respect to the barrier
77
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
thickness. When the wavelength is large with respect to the thickness, there will be significant diffraction.
In the limit is extremely large wavelength with respect to the barrier thickness, it is as if the barrier is not
even there (from the acoustic wave perspective) because the pressure is nearly uniform at the front and back
of the barrier. Thus, low frequencies sound energy easily transmits through large, rigid barriers when the
wavelength is much greater than the barrier thickness.
When the acoustic wavelength is small with respect to the barrier thickness, then there will be little
diffraction and a significant acoustic shadow will occur behind the barrier. This is a blocking effect behind
the barrier, oftentimes desired such as roadside barriers that shield residences from highway noise.
Similar principles hold for waves passing through apertures. When the wavelength is small with respect to
the aperture opening, the diffraction is small (the shadow is large), and the opposite is true. Diffraction is
generally observed in all wave physics, such that it is not unique to acoustics. The approximate ratio of
wavelength to source dimension L at which these trends begin to change is / L 3/2. Thus, for larger
ratios, there is greater diffraction, and for smaller ratios the shadowing effect may be more influential and
diffraction plays a lesser role.
Interesting illustrations of diffraction in light and water waves, can be found on many websites including
https://en.wikipedia.org/wiki/Diffraction A close search on Google maps will reveal signs of diffraction,
Figure 36.
78
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
Figure 36. Diffraction in ocean waves.
4.8 Outdoor sound propagation
Although the amplitude of a spherical acoustic pressure wave reduces by a factor of 1 / r , the outdoor
environment itself introduces additional dissipative effects that increase the rate at which the SPL decays.
Thus, while a doubling of distance reduces SPL by 6 [dB], accounting for the influences of the
environmental absorption of sound will cause a greater SPL reduction. An understanding of these processes
is important so as to not err too greatly on the conservative side of development when determining what the
appropriate distances are that sources of sound in the outdoors must be separated from receivers who may
not want to hear those sources. This is relevant, for instance, in airport development, placement of wind
turbines, civil infrastructure development (e.g. roadways near residential areas), and other legislative and
regulatory practices.
79
RL Harne
4.8.1
ME 5194, Eng. Acoust. 2016
The Ohio State University
Attenuation by the atmosphere
These atmospheric processes of sound absorption are modeled by the following equations. First, we
introduce the relaxation frequencies of oxygen and nitrogen, respectively, as
0.02 h
0.391 h
( 215 )
T 1/3
4.17 1
T0
9 280he
( 216 )
f r ,O 24 4.04 104 h
fr ,N
T
T0
1/2
where h is the humidity in percent (thus, 50% humidity is 0.5), T0 =293.15 [K] is the reference temperature,
T is the ambient temperature [K]. The relaxation frequencies (215) and (216) have units of [Hz]. Next, the
absorption rate in [dB/100m] is computed from
1/2
5/2
T
e2239.1/T
e3352/T
11 T
869 f 1.84 10 0.01275
0.1068
2
2
T
T
f
f
/
f
f
f
/
f
r ,O
r ,O
r,N
r,N
0
0
( 217 )
where f is the frequency in [Hz]. Based on the units of the absorption rate, , the actual absorption in
[dB] induced for sound propagation a distance r in [m] is
Aabs r /100
4.8.2
( 218 )
Attenuation by barriers
Barriers provide an additional means to significantly attenuate sound transmission from a source to receiver.
We presume that the barrier is infinitely rigid and long (according to the Figure 37 the length presumed to
be infinitely long is the out-of-page dimension). The sound attenuation provided by barriers is modeled
similarly as for optical diffraction theory, where the Fresnel number is defined to be
N 2 A B d /
( 219 )
The acoustic wavelength is and the dimensions A , B , and d are shown in Figure 37. Put in words,
A B is the shortest possible diffracted path of the wave from source to receiver while d is the straight-
line path from source to receiver. When N <0, the receiver can see the source. The Fresnel number evaluates
the excess distance that the wave must travel in order for it to surmount the barrier and reach the receiver,
with respect to the acoustic wavelength.
The SPL attenuation associated with the barrier is then computed from
Abar
2 N
5; N 0.2
20log10
tanh 2 N
0; N 0.2
( 220 )
80
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
where the units of Abar are [dB]. The fact that attenuation of sound is achieved for small, negative values
of the Fresnel number is because some of the sound is shielded from source to receiver. These developments
were derived and originally examined in Ref. [23].
Figure 37. Barrier between a sound source and a receiver.
4.8.3
Total sound attenuation outdoors
With these relations, we may compute the SPL at a location outdoors based on knowledge of the sound
power of the source a distance r from the receiver using a modification to (184) such that
SPL L 20log10 r 11 Aabs Abar
( 221 )
Example: The sound power level of a source in the outdoors is 115 [dB re 10-12 W] in the 250 [Hz] octave
band. The ambient temperature is 15 [C] and the humidity is 30 %. The shortest path that the sound source
waves must travel to overcome a barrier between the source and receiver is 150 [m] while the straight-line
path is 100 [m]. Determine the SPL at the receiver in the 250 [Hz] octave band (a) with the barrier and (b)
without the barrier.
Answer: The shortest possible diffracted path is the same as the distance r . We first need to determine the
absorption associated with the travel of the waves through the atmosphere. Using the values provided, we
have that =0.1245 [dB/100m]. Consequently, we have that Aabs =0.19 [dB]. In other words, there is
almost no additional atmospheric attenuation of sound due to the travel of the sound in the 250 [Hz] octave
band across a 150 [m] distance. Next, we compute the attenuation provided by the barrier. The Fresnel
number is N =73.5 (the sound speed at this temperature is approximately 340 [m/s], Appendix A10 [10]).
Then the SPL reduction associated with the barrier is found to be Abar =31.6 [dB]. Obviously, the barrier is
far more effective at attenuating the sound than the atmosphere!
Concluding, using (221), the SPL at the receiver is (a) 28.6 [dB] when the barrier is present and (b) 60.3
[dB] when the barrier is not. Note that the SPL at 10 [m] (with no barrier) is 84 [dB]. Considering the 250
[Hz] octave band, this could be typical of highway noise due to road-tire interactions. Thus, a home
positioned only 100 [m] from the roadway, by an equal distance to the barrier as the road is the to the
barrier, requires a tall barrier to attenuate the sound from the passing vehicles. Considering our geometry,
we have that 752 b2 502 b 55.9 [m] !
81
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
References
[1] W.H. Sumby, I. Pollack, Visual contribution to speech intelligibility in noise, The Journal of the
Acoustical Society of America 26, 212-215 (1954).
[2] J. Blauert, Communication Acoustics (Springer, Berlin, 2005).
[3] McGraw-Hill Dictionary of Scientific and Technical Terms (New York, New York, 2002).
[4] D.A. Bies, C.H. Hansen, Engineering Noise Control: Theory and Practice (Spon Press, London,
2006).
[5] P. Susini, S. McAdams, S. Winsberg, I. Perry, S. Vieillard, X. Rodet, Characterizing the sound quality
of air-conditioning noise, Applied Acoustics 65, 763-790 (2004).
[6] E. Parizet, E. Guyader, V. Nosulenko, Analysis of car door closing sound quality, Applied Acoustics
69, 12-22 (2008).
[7] Q.
Plummer.
Tech
Times.
[Online].;
May
1,
2016.
Available
from:
http://www.techtimes.com/articles/16661/20140928/2015-ford-mustang-ecoboost-fakes-enginenoise-via-stereo-hello-active-noise-control.htm.
[8] A.
Sitbon.
Bimmer
File.
[Online].;
May
1,
http://www.bimmerfile.com/2015/02/04/truth-bmws-active-sound/.
2016.
Available
from:
[9] K.C. Colwell. Car and Driver. [Online].; May 1, 2016. Available from:
http://www.caranddriver.com/features/faking-it-engine-sound-enhancement-explained-tech-dept.
[10] L.E. Kinsler, A.R. Frey, A.B. Coppens, J.V. Sanders, Fundamentals of Acoustics (John Wiley and
Sons, New York, 2000).
[11] L.L. Beranek, Noise and Vibration Control (Institute of Noise Control Engineering, Washington,
1988).
[12] D.T. Blackstock, Fundamentals of Physical Acoustics (Wiley, New York, 2000).
[13] M.P. Norton, Fundamentals of Noise and Vibration Analysis for Engineers (Cambridge University
Press, Cambridge, 1989).
[14] F. Fahy, P. Gardonio, Sound and Structural Vibration: Radiation, Transmission and Response
(Academic Press, Oxford, 1987).
[15] A.D. Pierce, Acoustics: an Introduction to its Physical Principles and Applications (McGraw Hill,
New York, 1981).
139
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
[16] M.C. Junger, D. Feit, Sound, Structures, and Their Interaction (MIT Press, Cambridge,
Massachusetts, 1972).
[17] S. Temkin, Elements of Acoustics (Wiley, New York, 1981).
[18] K.U. Ingard, Notes on Acoustics (Infinity Science Press, Hingham, Massachusetts, 2008).
[19] P.M. Morse, K.U. Ingard, Theoretical Acoustics (McGraw-Hill, New York, 1968).
[20] K.F. Graff, Wave Motion in Elastic Solids (Dover Publications, New York, 1991).
[21] J.W. Strutt, The Theory of Sound (MacMillian and Co., London, 1894).
[22] F. Fahy, Foundations of Engineering Acoustics (Academic Press, San Diego, California, 2001).
[23] Z. Maekawa, Noise reduction by screens, Applied Acoustics 1, 157-173 (1968).
[24] Microphone handbook, Volume 1. Technical Documentation. Brel & Kjr; 1996. Report No.: BE
1447 11.
[25] Measurement microphones. Booklet. Brel & Kjr; 1994. Report No.: BR 0567-12.
[26] Measuring sound. Booklet. Brel & Kjr; 1984. Report No.: BR 0047-13.
[27] A.V. Oppenheim, R.W. Schafer, J.R. Buck, Discrete-Time Signal Processing (Prentice-Hall, Upper
Saddle River, New Jersey, 1999).
[28] Blausen.com staff, Blausen gallery
doi:10.15347/wjm/2014.010 (2014).
2014,
Wikiversity
Journal
of
Medicine
[29] K.D. Kryter, The Effects of Noise on Man (Academic Press, New York, 1970).
[30] T.J. Schultz, Synthesis of social surveys on noise annoyance, The Journal of the Acoustical Society
of America 64, 377-405 (1978).
[31] D.M. Howard, J. Angus, Acoustics and Psychoacoustics (Focal Press, Oxford, 2006).
[32] J.H. McClellan, R.W. Schafer, M.A. Yoder, DSP First (Prentice-Hall, Upper Saddle River, NJ, 1998).
[33] P.B. Weston, J.D. Miller, I.J. Hirsh, Release from masking for speech, The Journal of the Acoustical
Society of America 42, 1053-1054 (1967).
[34] J.C.R. Licklider, The influence of interaural phase relations upon the masking of speech by white
noise, The Journal of the Acoustical Society of America 20, 150-159 (1948).
[35] I. Pollack, J.M. Pickett, Stereophonic listening and speech intelligibility against voice babble, The
Journal of the Acoustical Society of America 30, 131-133 (1958).
140
RL Harne
ME 5194, Eng. Acoust. 2016
The Ohio State University
[36] P.W. Gillett. Head mounted microphone arrays. PhD. dissertation. Blacksburg, VA: Virginia Tech;
2009.
[37] H. Lord, W. Gatley, H. Evensen, Noise Control for Engineers (Robert Krieger Publishing Co.,
Malabar, FL, 1987).
[38] W. Yost, Fundamentals of Hearing: an Introduction (Academic Press, Oxford, 1993).
141
Potrebbero piacerti anche
- Loudspeaker Impedance With Sia Smaartlive: Paul D. HendersonDocumento7 pagineLoudspeaker Impedance With Sia Smaartlive: Paul D. HendersonGabo CodornizNessuna valutazione finora
- Sound Spring06Documento11 pagineSound Spring06toolman1588Nessuna valutazione finora
- Visualization and Analysis of Loudspeaker VibrationDocumento2 pagineVisualization and Analysis of Loudspeaker VibrationVenkatesan Thanigai ArasuNessuna valutazione finora
- Loudspeakers Coverage AnglesDocumento0 pagineLoudspeakers Coverage AnglesAnthony HubbardNessuna valutazione finora
- Mixing Kick & BassDocumento14 pagineMixing Kick & BassAlberto ChagasNessuna valutazione finora
- Motional Feedback On A Loudspeaker WooferDocumento122 pagineMotional Feedback On A Loudspeaker WooferValk1902Nessuna valutazione finora
- How To Choose A Box: Closed BoxesDocumento12 pagineHow To Choose A Box: Closed BoxesAhmed GhareebNessuna valutazione finora
- How Much Amplifier Power Do I NeedDocumento17 pagineHow Much Amplifier Power Do I NeedjunverNessuna valutazione finora
- Impulse Alignment of Loudspeakers and MicrophonesDocumento14 pagineImpulse Alignment of Loudspeakers and MicrophonesyogimgurtNessuna valutazione finora
- C390DD Room EQ Setup ProcedureDocumento2 pagineC390DD Room EQ Setup ProcedureParrex ParraNessuna valutazione finora
- How To Select The Sound SystemDocumento14 pagineHow To Select The Sound SystemlahirujayasiriNessuna valutazione finora
- Addition Number Six The Con'-Stant Di-Rec-Tiv'I-Ty White Horn White PaperDocumento4 pagineAddition Number Six The Con'-Stant Di-Rec-Tiv'I-Ty White Horn White Paperjosiasns5257Nessuna valutazione finora
- Directivity in Loudspeaker SystemsDocumento14 pagineDirectivity in Loudspeaker SystemsDan HauerNessuna valutazione finora
- Sysnoise PDFDocumento74 pagineSysnoise PDFOm Parkash SharmaNessuna valutazione finora
- BOSE Professional Loudspeaker Design GuideDocumento6 pagineBOSE Professional Loudspeaker Design GuideJomalyn Ariola Pancho100% (2)
- Acoustic Measurement TipsDocumento6 pagineAcoustic Measurement TipsIrfangiNessuna valutazione finora
- Reverberation AlgorithmsDocumento123 pagineReverberation AlgorithmsFederico ScalasNessuna valutazione finora
- Impulse Response UtilityDocumento26 pagineImpulse Response UtilityStefano MuzioNessuna valutazione finora
- UntitledDocumento3 pagineUntitledKwaku Boateng IsaacNessuna valutazione finora
- A Spectrum Analyser in Your Shack PDFDocumento4 pagineA Spectrum Analyser in Your Shack PDFbaymanNessuna valutazione finora
- Book Engineering Acoustics.2004Documento205 pagineBook Engineering Acoustics.2004Yuan ChengNessuna valutazione finora
- White Paper KEFDocumento15 pagineWhite Paper KEFhificompassNessuna valutazione finora
- Measuring Thiele - Small ParametersDocumento11 pagineMeasuring Thiele - Small ParameterscasanmartinmNessuna valutazione finora
- BRÜEL & KJAER-Influence of Tripods and Mic ClipsDocumento48 pagineBRÜEL & KJAER-Influence of Tripods and Mic ClipsAptaeex Extremadura100% (1)
- Compressing and MasteringDocumento13 pagineCompressing and MasteringMilosNessuna valutazione finora
- Power Amplifiers: Phase Shift OscillatorDocumento3 paginePower Amplifiers: Phase Shift OscillatorAli DurazNessuna valutazione finora
- Dolby Technical Guidelines 1994Documento0 pagineDolby Technical Guidelines 1994Shrwanda ShrwandaNessuna valutazione finora
- Studio PhaseDocumento74 pagineStudio PhaseLeonel Molina AlvaradoNessuna valutazione finora
- Bob PhaseDocumento7 pagineBob Phasealecs serbNessuna valutazione finora
- FEM Simulation of Loud SpeakerDocumento10 pagineFEM Simulation of Loud SpeakerRaj KumarNessuna valutazione finora
- Active Hi-Fi LoudspeakersDocumento17 pagineActive Hi-Fi LoudspeakersCarioquenhoNessuna valutazione finora
- Bipolar MLTL Speaker DesignDocumento6 pagineBipolar MLTL Speaker DesignJohnNessuna valutazione finora
- Alan Parson Sound CheckDocumento5 pagineAlan Parson Sound CheckAstolfo GeremiaNessuna valutazione finora
- 6392 PDFDocumento16 pagine6392 PDFMiguel PérezNessuna valutazione finora
- DIY VU MetersDocumento2 pagineDIY VU MetersXefNedNessuna valutazione finora
- Basic Acoustic Measurement Primer v2Documento7 pagineBasic Acoustic Measurement Primer v2nathan_hwNessuna valutazione finora
- Equalisers, The Various Types and How They Work: Elliott Sound ProductsDocumento18 pagineEqualisers, The Various Types and How They Work: Elliott Sound ProductsA Daniel LazarescuNessuna valutazione finora
- Horn PhysicsDocumento29 pagineHorn PhysicsSubburam Srinivasan100% (1)
- Speaker Crossover LabDocumento51 pagineSpeaker Crossover LabRoland HendriksNessuna valutazione finora
- Understanding Line Arrays: by Mark HartshornDocumento2 pagineUnderstanding Line Arrays: by Mark HartshornEl Iimperio 73Nessuna valutazione finora
- Microphones: I. How They WorkDocumento12 pagineMicrophones: I. How They WorkAndrey SurkovNessuna valutazione finora
- Compensation of Loudspeaker Nonlinearities PDFDocumento98 pagineCompensation of Loudspeaker Nonlinearities PDFJude Sudario100% (1)
- AES143 PD05 Loudspeaker & Amplifier Power Ratings Rev04Documento25 pagineAES143 PD05 Loudspeaker & Amplifier Power Ratings Rev04bqmbqng kqryqntoNessuna valutazione finora
- Room Mode Calculator MetricDocumento130 pagineRoom Mode Calculator Metricrun_d86Nessuna valutazione finora
- Acoutics Applications Related To Wind Turbines WebinarDocumento29 pagineAcoutics Applications Related To Wind Turbines WebinarBelaliaNessuna valutazione finora
- Pro Tools Free Quick Start GuideDocumento52 paginePro Tools Free Quick Start GuidePaulo Sergio TeixeiraNessuna valutazione finora
- Totem-Pole Output StageDocumento18 pagineTotem-Pole Output StageSlanky BirOe PulauNessuna valutazione finora
- The Jordan Loudspeaker Manual Chapter 6Documento5 pagineThe Jordan Loudspeaker Manual Chapter 6Adam PaulNessuna valutazione finora
- Audio Levels DBu DBV and The Gang What You Need To KnowDocumento5 pagineAudio Levels DBu DBV and The Gang What You Need To KnowFrancisco HernandezNessuna valutazione finora
- What Is A 70 Volt Sound SystemDocumento10 pagineWhat Is A 70 Volt Sound SystemRaul Ernesto Gallegos MoralesNessuna valutazione finora
- Voltage Controlled OscillatorDocumento8 pagineVoltage Controlled OscillatorSusanaNessuna valutazione finora
- Mutual Coupling Between LoudspeakersDocumento40 pagineMutual Coupling Between LoudspeakersDenys FormigaNessuna valutazione finora
- Filter PDFDocumento21 pagineFilter PDFNugraha PratamaNessuna valutazione finora
- LoudSpeaker Voice-Coil Inductance Losses - Circuit Models, Parameter Estimation and Effects On Frequency Response (W. Marshall Leach) PDFDocumento8 pagineLoudSpeaker Voice-Coil Inductance Losses - Circuit Models, Parameter Estimation and Effects On Frequency Response (W. Marshall Leach) PDFVictor Hernandez MedinaNessuna valutazione finora
- Practical Course On LoudspeakerDocumento7 paginePractical Course On LoudspeakerjeyaselvanmNessuna valutazione finora
- How To Measure Your Room's Acoustics With Room EQ Wizard - MusicRadarDocumento9 pagineHow To Measure Your Room's Acoustics With Room EQ Wizard - MusicRadarBrandy ThomasNessuna valutazione finora
- Chapter 7 Mixing Console (PDFDrive)Documento134 pagineChapter 7 Mixing Console (PDFDrive)Emanuel EscobedoNessuna valutazione finora
- Baxandall Tone ControlDocumento7 pagineBaxandall Tone ControlSheeNessuna valutazione finora
- Acoustics From Interior Designer Perspective: Naglaa Sami Abdelaziz MahmoudDocumento13 pagineAcoustics From Interior Designer Perspective: Naglaa Sami Abdelaziz MahmoudSavanth SuriNessuna valutazione finora
- Chung 2004 Challenges and Recent Developments in Hearing Aids Part II Feedback and Occlusion Effect ReductionDocumento40 pagineChung 2004 Challenges and Recent Developments in Hearing Aids Part II Feedback and Occlusion Effect ReductionAlex A.Nessuna valutazione finora
- Q J Mechanics Appl Math 1958 WATSON 302 25Documento24 pagineQ J Mechanics Appl Math 1958 WATSON 302 25王龙Nessuna valutazione finora
- JMP 12.2 Release NotesDocumento6 pagineJMP 12.2 Release Notes王龙Nessuna valutazione finora
- DOE Guide PDFDocumento548 pagineDOE Guide PDF王龙100% (1)
- Com Sol Final Slides Sept 2016Documento29 pagineCom Sol Final Slides Sept 2016王龙Nessuna valutazione finora
- Day 1Documento133 pagineDay 1Adriana ChitezNessuna valutazione finora
- Arnsperger - Integral Economics ManifestoDocumento12 pagineArnsperger - Integral Economics ManifestoAlfredo del ValleNessuna valutazione finora
- Hydraulic Coefficients of Orifice and Bernoulli TheoremDocumento5 pagineHydraulic Coefficients of Orifice and Bernoulli TheoremerronNessuna valutazione finora
- Paul Éluard (1895-1952) : Life: Les Yeux Fertiles (1936) - L'Immaculée Conception (1930)Documento5 paginePaul Éluard (1895-1952) : Life: Les Yeux Fertiles (1936) - L'Immaculée Conception (1930)api-357156106100% (1)
- Managing People in Global Markets-The Asia Pacific PerspectiveDocumento4 pagineManaging People in Global Markets-The Asia Pacific PerspectiveHaniyah NadhiraNessuna valutazione finora
- Andrew Smith (Auth.) - Porphyry's Place in The Neoplatonic Tradition - A Study in Post-Plotinian Neoplatonism-Springer Netherlands (1975) PDFDocumento187 pagineAndrew Smith (Auth.) - Porphyry's Place in The Neoplatonic Tradition - A Study in Post-Plotinian Neoplatonism-Springer Netherlands (1975) PDFNilo Gelais Costa JuniorNessuna valutazione finora
- 1-A Business Model Framework For The Design and Evaluation of Business Models in The Internet of ServicesDocumento13 pagine1-A Business Model Framework For The Design and Evaluation of Business Models in The Internet of ServicesmamatnamakuNessuna valutazione finora
- Tarot SpreadsDocumento6 pagineTarot SpreadssueNessuna valutazione finora
- SMP - Bahasa Inggris 1994Documento6 pagineSMP - Bahasa Inggris 1994ninoNessuna valutazione finora
- Archetypes Chart in Star Wars-KEYDocumento3 pagineArchetypes Chart in Star Wars-KEYDavid GreggsNessuna valutazione finora
- Teachers Profile MNHSDocumento28 pagineTeachers Profile MNHSMICHELLE CANONIGONessuna valutazione finora
- Feser-Reply To Marie George - RevisedDocumento10 pagineFeser-Reply To Marie George - RevisedDiogo AugustoNessuna valutazione finora
- Lesson PlanDocumento4 pagineLesson PlanWizza Mae L. Coralat100% (2)
- Govt 1006 Lecture #1 Public Administration Meaning, Aims Objectives, Scope and DimensionDocumento21 pagineGovt 1006 Lecture #1 Public Administration Meaning, Aims Objectives, Scope and DimensionEmma100% (1)
- Team Cohesion in Water PoloDocumento19 pagineTeam Cohesion in Water PoloEween100% (2)
- Analysis and Listening Processes of Electroacoustic MusicDocumento13 pagineAnalysis and Listening Processes of Electroacoustic Musicmykhos100% (1)
- Fayol Stands The Test of TimeFayol Stands The Test of TimeDocumento17 pagineFayol Stands The Test of TimeFayol Stands The Test of Timecarlos_xccunhaNessuna valutazione finora
- AngajawiDocumento13 pagineAngajawiAhmad BasoNessuna valutazione finora
- Communicating EU Research and InnovationDocumento24 pagineCommunicating EU Research and InnovationAleksandraVidicNessuna valutazione finora
- PoemsDocumento6 paginePoemsJohn Carl RonatoNessuna valutazione finora
- Criminological ResearchDocumento209 pagineCriminological ResearchBRYANTRONICO50% (2)
- Philo of Alexandria An Exegete For His Time - Peder BorgenDocumento10 paginePhilo of Alexandria An Exegete For His Time - Peder BorgenTemirbek BolotNessuna valutazione finora
- Entity Relationship DiagramDocumento80 pagineEntity Relationship DiagramAmer FarooqNessuna valutazione finora
- Nature and Nurture: Chapter 3 99-133Documento18 pagineNature and Nurture: Chapter 3 99-133yummywords1254100% (1)
- The 2016 Presidential Election-An Abundance of ControversiesDocumento20 pagineThe 2016 Presidential Election-An Abundance of ControversiesHoover InstitutionNessuna valutazione finora
- Impact of Counter-Terrorism On Communities - Methodology ReportDocumento56 pagineImpact of Counter-Terrorism On Communities - Methodology ReportPaulo FelixNessuna valutazione finora
- General Theory of LibraryDocumento11 pagineGeneral Theory of LibraryMukiibi DuncanNessuna valutazione finora
- ParallelDocumento13 pagineParallelGauis Laurence CaraoaNessuna valutazione finora
- Listening To Australia - IntermediateDocumento82 pagineListening To Australia - IntermediateAnonymous RYbWvk83% (6)
- A Schematic Model of Baryons and MesonsDocumento2 pagineA Schematic Model of Baryons and MesonscoerenciaceNessuna valutazione finora
- The Sutta Pericope of 'The Cessation' and Its InterpretationDocumento23 pagineThe Sutta Pericope of 'The Cessation' and Its InterpretationGuhyaprajñāmitra3100% (1)