Potrebbero piacerti anche
- ALU and MAC NotesDocumento36 pagineALU and MAC NotesMajerry Pierre-AntoineNessuna valutazione finora
- Floating-Point Arithmetic Floating-Point Arithmetic Floating-Point Arithmetic Floating-Point Arithmetic Floating-Point Arithmetic 33333Documento18 pagineFloating-Point Arithmetic Floating-Point Arithmetic Floating-Point Arithmetic Floating-Point Arithmetic Floating-Point Arithmetic 33333Krishna ChaitanyaNessuna valutazione finora
- Lab 1Documento10 pagineLab 1sibarama20k100% (1)
- Computer Arithmetic-1Documento46 pagineComputer Arithmetic-1Bam NoiceNessuna valutazione finora
- BCS302 Unit-2 (Part-III)Documento7 pagineBCS302 Unit-2 (Part-III)dp06vnsNessuna valutazione finora
- Integer:: Arithmetic and Logic UnitDocumento10 pagineInteger:: Arithmetic and Logic UnitAli. RaoNessuna valutazione finora
- Module-2 - Lecture 2: Alu - Signed Addition/SubtractionDocumento44 pagineModule-2 - Lecture 2: Alu - Signed Addition/SubtractionWINORLOSENessuna valutazione finora
- Unit - 3 of Computer ArchitectureDocumento59 pagineUnit - 3 of Computer ArchitectureShweta mauryaNessuna valutazione finora
- A Fpga Ieee-754-2008 Decimal64 Floating-Point Adder-SubtractorDocumento6 pagineA Fpga Ieee-754-2008 Decimal64 Floating-Point Adder-Subtractorlavanya_msNessuna valutazione finora
- DTSP Unit 5Documento12 pagineDTSP Unit 5GurunathanNessuna valutazione finora
- Fixed and Floating Point RepresentationDocumento5 pagineFixed and Floating Point RepresentationjyotiranjanNessuna valutazione finora
- Microprocessors Lecture 4 - NewDocumento5 pagineMicroprocessors Lecture 4 - NewAriane Faye SalongaNessuna valutazione finora
- Addressing ModesDocumento6 pagineAddressing ModesabinayamalathyNessuna valutazione finora
- CO Unit 3-2Documento15 pagineCO Unit 3-2Aravinder Reddy SuramNessuna valutazione finora
- Arithmétique Step7Documento10 pagineArithmétique Step7plcrgNessuna valutazione finora
- Mincoef Maxcoef Range: DSP Scaling, A Pid Example: Difference Equations Must Be Scaled ToDocumento9 pagineMincoef Maxcoef Range: DSP Scaling, A Pid Example: Difference Equations Must Be Scaled ToVIJAYPUTRANessuna valutazione finora
- Coa Rest NotesDocumento24 pagineCoa Rest NotesAyush NayakNessuna valutazione finora
- Explain FLYNN Classification With Suitable ExamplesDocumento7 pagineExplain FLYNN Classification With Suitable Examplesjishupanja33Nessuna valutazione finora
- Unit III CAODocumento39 pagineUnit III CAOmdmomin7517Nessuna valutazione finora
- S U D P F C J L: 2.1 Information Representation in Computer SystemsDocumento21 pagineS U D P F C J L: 2.1 Information Representation in Computer SystemsAdrian BarcanNessuna valutazione finora
- Unit - 5 Computer Arithmetic: 5.1 Addition and SubtractionDocumento16 pagineUnit - 5 Computer Arithmetic: 5.1 Addition and SubtractionKeshav NaganathanNessuna valutazione finora
- DSP Assignment 3Documento11 pagineDSP Assignment 3anoopk778Nessuna valutazione finora
- Fixed Point Routines - 00617bDocumento383 pagineFixed Point Routines - 00617bGuillermo Hernandez100% (1)
- Lab 1 2 3 21BRS1686Documento13 pagineLab 1 2 3 21BRS1686Shrestha Singh 21BRS1686Nessuna valutazione finora
- 32 Bit Floating Point ALUDocumento7 pagine32 Bit Floating Point ALUBalachandarVetrivelan80% (5)
- UNIT-4 Digital Electronics NotesDocumento32 pagineUNIT-4 Digital Electronics NotesNaveen SuvvadaNessuna valutazione finora
- 07 68000 Instruction SetDocumento13 pagine07 68000 Instruction SetYassine BouaichiNessuna valutazione finora
- Floating Point MultiplierDocumento14 pagineFloating Point MultiplierRutul Patel100% (1)
- White Paper One VHDL Maths 2008Documento5 pagineWhite Paper One VHDL Maths 2008Anonymous lidok7lDiNessuna valutazione finora
- GEH-6195G MARK V APPLICATION MANUAL - MARK V MathDocumento8 pagineGEH-6195G MARK V APPLICATION MANUAL - MARK V MathadrianorexNessuna valutazione finora
- Fixed Versus Floating PointDocumento5 pagineFixed Versus Floating PointAnil AgarwalNessuna valutazione finora
- Unit 2Documento21 pagineUnit 2mrunal1729Nessuna valutazione finora
- COMP NotesDocumento32 pagineCOMP NotessreelayaNessuna valutazione finora
- Design of Double Ieee PrecisionDocumento9 pagineDesign of Double Ieee PrecisionyrikkiNessuna valutazione finora
- Ee188 Final Batu PlazaDocumento16 pagineEe188 Final Batu Plazameytz102Nessuna valutazione finora
- Digital Electronics Registers Transfer Logic and Micro-Operation (1) .PPSXDocumento18 pagineDigital Electronics Registers Transfer Logic and Micro-Operation (1) .PPSXNGUYỄN HOÀNG LINHNessuna valutazione finora
- Digital Electronics Registers Transfer Logic and Micro-Operation (1) .PPSXDocumento18 pagineDigital Electronics Registers Transfer Logic and Micro-Operation (1) .PPSXNGUYỄN HOÀNG LINHNessuna valutazione finora
- DLD Lec 2Documento32 pagineDLD Lec 2Amir QayyumNessuna valutazione finora
- Binary Numbering Systems: April 1997, Ver. 1 Application Note 83Documento16 pagineBinary Numbering Systems: April 1997, Ver. 1 Application Note 83JackzidNessuna valutazione finora
- Arithmetic and Logical InstructionsDocumento4 pagineArithmetic and Logical InstructionsJonalyn MercadoNessuna valutazione finora
- Pro j2Documento3 paginePro j2Chu LamNessuna valutazione finora
- Cs Important Questions by UjjwalDocumento19 pagineCs Important Questions by Ujjwalkumawatujjwal18Nessuna valutazione finora
- Lectures On Computer Arithmetic: Unit 7Documento20 pagineLectures On Computer Arithmetic: Unit 7viihaanghtrivediNessuna valutazione finora
- Lab 4: Analog To Digital Converter On Ts-5500 SBC: ObjectivesDocumento7 pagineLab 4: Analog To Digital Converter On Ts-5500 SBC: ObjectivesJY FooNessuna valutazione finora
- Floating Point ArithDocumento8 pagineFloating Point ArithVishnupriya Akinapelli100% (1)
- Logical Organizations OF Computers: Sweta Kumari 15014 CA-103 LoocDocumento15 pagineLogical Organizations OF Computers: Sweta Kumari 15014 CA-103 LoocSweta AgrawalNessuna valutazione finora
- Raiyan's CO Unit - 2Documento32 pagineRaiyan's CO Unit - 2androiconsNessuna valutazione finora
- MathDocumento67 pagineMathPeniel JimenezNessuna valutazione finora
- 5EC3-01: Computer Architecture: UNIT-2Documento17 pagine5EC3-01: Computer Architecture: UNIT-2Himanshi SainiNessuna valutazione finora
- Introduction To Fixed Point MathDocumento8 pagineIntroduction To Fixed Point Mathrk123456Nessuna valutazione finora
- Cao 02Documento9 pagineCao 02Dr. MNV KiranbabuNessuna valutazione finora
- Quaternary Arithmetic Logic Unit Design Using VHDLDocumento4 pagineQuaternary Arithmetic Logic Unit Design Using VHDLIjsrnet EditorialNessuna valutazione finora
- Homework Solutions 2Documento2 pagineHomework Solutions 2Minh HoangNessuna valutazione finora
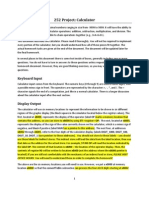
- 252 Project: Calculator: Keyboard InputDocumento8 pagine252 Project: Calculator: Keyboard InputSamuel TanuwijajaNessuna valutazione finora
- Ece 306L - Experiment 4: Signal QuantizationDocumento10 pagineEce 306L - Experiment 4: Signal QuantizationAndy CaoNessuna valutazione finora
- An Overview of Motorola DSP563XX ProcessorsDocumento17 pagineAn Overview of Motorola DSP563XX ProcessorsS G ShivaPrasad YadavNessuna valutazione finora
- Twos Complement PrimerDocumento2 pagineTwos Complement PrimeracxyvbNessuna valutazione finora
- Hertz 等。 - Algorithms for implementing roots, inverse and invDocumento26 pagineHertz 等。 - Algorithms for implementing roots, inverse and inv林冠宏Nessuna valutazione finora
- DSP AssignmentDocumento8 pagineDSP Assignmentanoopk222Nessuna valutazione finora
- Inspire Award Completion PDFDocumento11 pagineInspire Award Completion PDFKrishna ChaitanyaNessuna valutazione finora
- A Sign of Quality Product: Omega ElectronicsDocumento1 paginaA Sign of Quality Product: Omega ElectronicsKrishna ChaitanyaNessuna valutazione finora
- Criteria-4: 4. Student's PerformanceDocumento12 pagineCriteria-4: 4. Student's PerformanceKrishna ChaitanyaNessuna valutazione finora
- SAKURA 2019 Nomination For ParticipationDocumento13 pagineSAKURA 2019 Nomination For ParticipationKrishna ChaitanyaNessuna valutazione finora
- MPMC Course FileDocumento41 pagineMPMC Course FileKrishna ChaitanyaNessuna valutazione finora
- Esa 86 88e PDFDocumento97 pagineEsa 86 88e PDFKrishna ChaitanyaNessuna valutazione finora
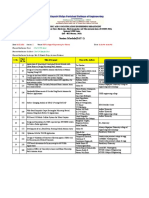
- ICMEET Paper Presentations Schedule PDFDocumento6 pagineICMEET Paper Presentations Schedule PDFKrishna ChaitanyaNessuna valutazione finora
- Teacher Information SystemDocumento12 pagineTeacher Information SystemKrishna ChaitanyaNessuna valutazione finora
- News Letter Vol 19 No 3 Sep-Dec 2017 (Mail)Documento36 pagineNews Letter Vol 19 No 3 Sep-Dec 2017 (Mail)Krishna ChaitanyaNessuna valutazione finora
- Cadence Virtuso Layout EditorDocumento18 pagineCadence Virtuso Layout EditorKrishna ChaitanyaNessuna valutazione finora
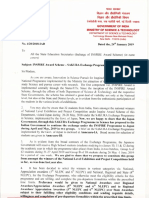
- India: Memorandum Understanding Council EducationDocumento4 pagineIndia: Memorandum Understanding Council EducationKrishna ChaitanyaNessuna valutazione finora
- Chapter 2 Part1 PDFDocumento81 pagineChapter 2 Part1 PDFKrishna ChaitanyaNessuna valutazione finora
- Internet of Things With PythonDocumento6 pagineInternet of Things With PythonKrishna ChaitanyaNessuna valutazione finora
- Chapter 1 2 PDFDocumento15 pagineChapter 1 2 PDFKrishna ChaitanyaNessuna valutazione finora
- Introduction To MasmDocumento2 pagineIntroduction To MasmKrishna ChaitanyaNessuna valutazione finora
- Jawaharlal Nehru Technological University, KakinadaDocumento1 paginaJawaharlal Nehru Technological University, KakinadaKrishna ChaitanyaNessuna valutazione finora
- RTOS6Documento20 pagineRTOS6Krishna ChaitanyaNessuna valutazione finora