Potrebbero piacerti anche
- 5.costo en Maquinaria PDocumento45 pagine5.costo en Maquinaria PMiguel Angel Mendo CordovaNessuna valutazione finora
- Manual de Sap para ConfiabilidadDocumento8 pagineManual de Sap para ConfiabilidadMarcos GoianoNessuna valutazione finora
- Mantenimiento BombasDocumento48 pagineMantenimiento BombasIsaac SagelNessuna valutazione finora
- Notación Básica de RoscasDocumento12 pagineNotación Básica de RoscasJaimeDaniloDiazBedoya100% (1)
- Trabajo Final, Grupo 5, Informe de Auditoría AmbientalDocumento30 pagineTrabajo Final, Grupo 5, Informe de Auditoría AmbientalIsaac Sagel86% (7)
- Modelo Objetivos y Metas SSTDocumento13 pagineModelo Objetivos y Metas SST14b1615486% (14)
- EsIA Linea 3 Metro Panama PDFDocumento2.006 pagineEsIA Linea 3 Metro Panama PDFIsaac SagelNessuna valutazione finora
- Pliego Tecnico Normativo-RPTD15 Operacion y MantenimientoDocumento12 paginePliego Tecnico Normativo-RPTD15 Operacion y MantenimientoElias Ulises Manriquez FuentealbaNessuna valutazione finora
- Examen Final Direccion Comercial JhonnyDocumento7 pagineExamen Final Direccion Comercial JhonnyPaola Ardila Buritica67% (3)
- Guia Electricidad 8° BásicoDocumento2 pagineGuia Electricidad 8° BásicoCarlaKarina TC100% (1)
- Guia Introduccion A Python para Ciencia de Materiales PRDocumento7 pagineGuia Introduccion A Python para Ciencia de Materiales PRIsaac SagelNessuna valutazione finora
- Fabricación Aditiva-DissertDocumento10 pagineFabricación Aditiva-DissertIsaac SagelNessuna valutazione finora
- Guia de Instalamación - Bombas Rotodinámicas 2021Documento60 pagineGuia de Instalamación - Bombas Rotodinámicas 2021Isaac SagelNessuna valutazione finora
- Ensayo de Traccion - Guia 2021Documento10 pagineEnsayo de Traccion - Guia 2021Isaac SagelNessuna valutazione finora
- Lección PsicrometriaDocumento11 pagineLección PsicrometriaIsaac SagelNessuna valutazione finora
- Introducción A La TurbomaquinariaDocumento21 pagineIntroducción A La TurbomaquinariaIsaac SagelNessuna valutazione finora
- Problemas Resueltos de Transferencia de Calor Con Metodos NumericosDocumento11 pagineProblemas Resueltos de Transferencia de Calor Con Metodos NumericosIsaac SagelNessuna valutazione finora
- 13-Zonas Marino Costeras - Grupo - 6Documento5 pagine13-Zonas Marino Costeras - Grupo - 6Isaac SagelNessuna valutazione finora
- Tecnologia SlurryDocumento11 pagineTecnologia SlurryIsaac SagelNessuna valutazione finora
- Presentación SlurryDocumento23 paginePresentación SlurryIsaac SagelNessuna valutazione finora
- Diseño de Sistema de Refrigeración Termoeléctrica-Capsula de MedicamentoDocumento2 pagineDiseño de Sistema de Refrigeración Termoeléctrica-Capsula de MedicamentoIsaac SagelNessuna valutazione finora
- Cañerías y Recipientes de Presión. Tomo II Diseño ... - (Ejemplo 8.D)Documento2 pagineCañerías y Recipientes de Presión. Tomo II Diseño ... - (Ejemplo 8.D)Isaac SagelNessuna valutazione finora
- LABORATORIO Prueba de TorsiónDocumento4 pagineLABORATORIO Prueba de TorsiónIsaac SagelNessuna valutazione finora
- Teoría de Motivación de Abraham Maslow - SagelDocumento9 pagineTeoría de Motivación de Abraham Maslow - SagelIsaac SagelNessuna valutazione finora
- Análisis Crítico Del Plan de Manejo AmbientalDocumento41 pagineAnálisis Crítico Del Plan de Manejo AmbientalIsaac SagelNessuna valutazione finora
- Guia Tecnica de Buenas Practicas de Manufactura PDFDocumento68 pagineGuia Tecnica de Buenas Practicas de Manufactura PDFIsaac SagelNessuna valutazione finora
- InformeDocumento13 pagineInformeCristopher GonzalesNessuna valutazione finora
- Desarrollo Guia No. 2 Arbol de ProblemasDocumento2 pagineDesarrollo Guia No. 2 Arbol de ProblemasMonica ARTURONessuna valutazione finora
- Unidad 1 La Productividad y El Diseño Del TrabajoDocumento8 pagineUnidad 1 La Productividad y El Diseño Del TrabajoGamaliel Cruz GonzalezNessuna valutazione finora
- E .T. Utiles de EscritorioDocumento3 pagineE .T. Utiles de EscritorioJhordan Cárdenas IparraguirreNessuna valutazione finora
- ALIMEXDocumento5 pagineALIMEXDanielaNessuna valutazione finora
- Resumen PPIDocumento36 pagineResumen PPILissette Castillo SepulvedaNessuna valutazione finora
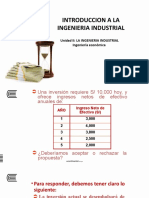
- Unidad Ii: La Ingenieria Industrial Ingeniería EconómicaDocumento17 pagineUnidad Ii: La Ingenieria Industrial Ingeniería EconómicaYUSSTIN ISAIAS GUADALUPE CASTRONessuna valutazione finora
- Desquinche LaborDocumento378 pagineDesquinche LaborLUISHUNGARO74Nessuna valutazione finora
- Cotización #330-2021 - v1 TORRES AJ PERU SACDocumento1 paginaCotización #330-2021 - v1 TORRES AJ PERU SACMiguel PortalanzaNessuna valutazione finora
- Revista Aliberico Nº 5Documento8 pagineRevista Aliberico Nº 5rayuela_50Nessuna valutazione finora
- Material Capacitacion ServiEstado Nueva CuentaRUT v12 2019.02.04 PDFDocumento56 pagineMaterial Capacitacion ServiEstado Nueva CuentaRUT v12 2019.02.04 PDFCintia Inostroza QuezadaNessuna valutazione finora
- CLASIFICADOSWEB1018Documento24 pagineCLASIFICADOSWEB1018internetelheraldoNessuna valutazione finora
- Art. Demanda Del Metropolitano Ruta B - Final Subsanado ObsDocumento9 pagineArt. Demanda Del Metropolitano Ruta B - Final Subsanado Obsalexander carrasco herreraNessuna valutazione finora
- NTP - 321 - 123Documento2 pagineNTP - 321 - 123Fiorella Romucho SoteloNessuna valutazione finora
- Ensayo de Seguridad Ocupacional e HigieneDocumento2 pagineEnsayo de Seguridad Ocupacional e HigieneMiguel Alexander EscobarNessuna valutazione finora
- Lista de Precios Siemens - Versión Abril 2016 Gramsa PDFDocumento170 pagineLista de Precios Siemens - Versión Abril 2016 Gramsa PDFjhessainNessuna valutazione finora
- Investigación Documental Robótica-1Documento29 pagineInvestigación Documental Robótica-1josegabrieljimenez245Nessuna valutazione finora
- Arbol de Decisión - En.esDocumento2 pagineArbol de Decisión - En.esRoberto BravoNessuna valutazione finora
- Grupo 3 Planeacion de Ventas y OperacionesDocumento18 pagineGrupo 3 Planeacion de Ventas y OperacionesDavid Pacheco Castro100% (1)
- Tarea 4.2 Control de Lectura - Manual de Organización y Funciones (MOF) y Cuadro de Asignación de Personal (CAP)Documento4 pagineTarea 4.2 Control de Lectura - Manual de Organización y Funciones (MOF) y Cuadro de Asignación de Personal (CAP)Diego Cochachin Mota100% (1)
- Curriculum Vitae BrancoDocumento4 pagineCurriculum Vitae BrancoAlexis SaavedraNessuna valutazione finora
- Análisis de Precio UnitarioDocumento36 pagineAnálisis de Precio UnitarioCARLOS BADHIR GONZALEZ HERNANDEZ100% (1)
- Valorizacion AdicionalDocumento54 pagineValorizacion AdicionalJuan VictorNessuna valutazione finora