Potrebbero piacerti anche
- Análisis de Bode de Integradores en CascadaDocumento8 pagineAnálisis de Bode de Integradores en CascadaRicardo DiazNessuna valutazione finora
- Margen de GananciaDocumento22 pagineMargen de GananciaDiana Cristina PereaNessuna valutazione finora
- 4.2 Margenes Fase y GananciaDocumento7 pagine4.2 Margenes Fase y GananciaMaritza Guadalupe100% (1)
- Expo ControlDocumento12 pagineExpo ControlMiguel AlejandroNessuna valutazione finora
- Ps2320 Problemas Resueltos Bode NyquistDocumento4 paginePs2320 Problemas Resueltos Bode NyquistJuan Rossel HUNessuna valutazione finora
- Diagrama de BodeDocumento10 pagineDiagrama de BodeZelene Rosas0% (1)
- Diagrama BodeDocumento13 pagineDiagrama BodeJota PiscoyaNessuna valutazione finora
- Sistema de Control 1 Labo 5Documento9 pagineSistema de Control 1 Labo 5Iván Fernando Mayorga HilarioNessuna valutazione finora
- Bode Margene SDocumento8 pagineBode Margene Schecom3Nessuna valutazione finora
- Sistema de Fase MínimaDocumento8 pagineSistema de Fase Mínimaelianny jimenezNessuna valutazione finora
- Ejemplo 1 BODEDocumento6 pagineEjemplo 1 BODEScott MelgarejoNessuna valutazione finora
- Criterio de Estabilidad de BodeDocumento5 pagineCriterio de Estabilidad de Bodeefraín100% (1)
- Diagrama de BodeDocumento7 pagineDiagrama de BodeGuillermo ArenasNessuna valutazione finora
- Respuesta en FrecuenciaDocumento22 pagineRespuesta en FrecuenciaClaudio AllubNessuna valutazione finora
- Método de La Respuesta de FrecuenciaDocumento64 pagineMétodo de La Respuesta de FrecuenciaAdrian Gomez BaldeonNessuna valutazione finora
- Estabilidad RelativaDocumento6 pagineEstabilidad RelativaEliana PilcoNessuna valutazione finora
- Compensadores Adelanto de FaseDocumento14 pagineCompensadores Adelanto de FaseDavid GerardoNessuna valutazione finora
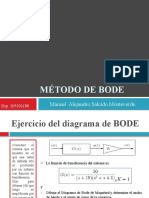
- Ejemplo Método de BODEDocumento7 pagineEjemplo Método de BODEManuel SalcidoNessuna valutazione finora
- Compensación de Adelanto, Retraso y Adelanto-Retraso deDocumento20 pagineCompensación de Adelanto, Retraso y Adelanto-Retraso deabraham_dqhausNessuna valutazione finora
- Actividad 6 ControlDocumento12 pagineActividad 6 Controlhelen diazNessuna valutazione finora
- Diagramas de Bode Con MATLAB - 30!05!2015Documento11 pagineDiagramas de Bode Con MATLAB - 30!05!2015Eduardo GodinezNessuna valutazione finora
- BodeDocumento41 pagineBodeGilberto QuintanaNessuna valutazione finora
- Sistemas Con Tiempo de RetardoDocumento5 pagineSistemas Con Tiempo de RetardoDanny QuinatoaNessuna valutazione finora
- Estabilidad RelativaDocumento28 pagineEstabilidad RelativaMarco Alejandro50% (2)
- Laboratorio 4 - Diagramas de BodeDocumento10 pagineLaboratorio 4 - Diagramas de Bodemaria_carbajal_390% (1)
- Practica 7 ControlDocumento18 paginePractica 7 ControlDaniel Loaiza LópezNessuna valutazione finora
- Tarea 3Documento17 pagineTarea 3Karlita GaspitoNessuna valutazione finora
- Osciladores SinusoidalesDocumento109 pagineOsciladores SinusoidalesMIGUEL JESUS MEDINA GAGONessuna valutazione finora
- Semana 9Documento30 pagineSemana 9Freddy FernandezNessuna valutazione finora
- Desarrollo de 5 DinamicaDocumento26 pagineDesarrollo de 5 DinamicaRosalinda Barrios de la cruzNessuna valutazione finora
- Diagrama de BodeDocumento4 pagineDiagrama de BodeTito Fernando MuñozNessuna valutazione finora
- Filtros y Distorsion de Fase PDFDocumento13 pagineFiltros y Distorsion de Fase PDFMarcos PalaciosNessuna valutazione finora
- Criterio de Estabilidad de Nyquist y BODE-Anllela Lucia y Leonardo LoretoDocumento12 pagineCriterio de Estabilidad de Nyquist y BODE-Anllela Lucia y Leonardo LoretoStephania LuciaNessuna valutazione finora
- Laboratorio 2Documento26 pagineLaboratorio 2Azu CotoNessuna valutazione finora
- NyquistDocumento5 pagineNyquistJota PiscoyaNessuna valutazione finora
- Control de Temperatura para Ventiladores, Teoria y CalculosDocumento7 pagineControl de Temperatura para Ventiladores, Teoria y Calculostony_flores_11Nessuna valutazione finora
- Realimentación NegativaDocumento10 pagineRealimentación NegativaRodrigo Torrico GijonNessuna valutazione finora
- Diseño Por Retardo de Fase Utilizando El Diagrama de BodeDocumento30 pagineDiseño Por Retardo de Fase Utilizando El Diagrama de BodeVikthor Lopez100% (1)
- Tarea 13Documento21 pagineTarea 13Luis TapiaNessuna valutazione finora
- Práctica 11 MatlabDocumento5 paginePráctica 11 MatlabPedro RiveraNessuna valutazione finora
- L2 Previo ElectronicosDocumento16 pagineL2 Previo ElectronicosRed Fiee Uni100% (1)
- Respuesta en Frecuencia de Un Sistema de ControlDocumento18 pagineRespuesta en Frecuencia de Un Sistema de ControljoercazNessuna valutazione finora
- Tema 10 de Unidad 1Documento21 pagineTema 10 de Unidad 1Scarllet Osuna TostadoNessuna valutazione finora
- Grupo 2 - Semana 10Documento51 pagineGrupo 2 - Semana 10Godo SánchezNessuna valutazione finora
- Tarea 3Documento15 pagineTarea 3Luis TapiaNessuna valutazione finora
- Unidad 5clasicoDocumento15 pagineUnidad 5clasicoEsdras OrtegaNessuna valutazione finora
- Taller en Clase Carta A SmithDocumento8 pagineTaller en Clase Carta A SmithDiego GuachaminNessuna valutazione finora
- Ejercicios 7.1Documento32 pagineEjercicios 7.1Juan Rossel HUNessuna valutazione finora
- Compensadores en Atraso Usando El Método de RespuestaDocumento15 pagineCompensadores en Atraso Usando El Método de RespuestaLuis RCNessuna valutazione finora
- BodeDocumento7 pagineBodeFrancisco Javier Gaona AlvaradoNessuna valutazione finora
- Detector de bordes astuto: Revelando el arte de la percepción visualDa EverandDetector de bordes astuto: Revelando el arte de la percepción visualNessuna valutazione finora
- Ejercicios de Integrales de Línea, Superficie y VolumenDa EverandEjercicios de Integrales de Línea, Superficie y VolumenValutazione: 4 su 5 stelle4/5 (2)
- Armónicas en Sistemas Eléctricos IndustrialesDa EverandArmónicas en Sistemas Eléctricos IndustrialesValutazione: 4.5 su 5 stelle4.5/5 (12)
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDa EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoNessuna valutazione finora
- Dipl Pyme-Gobierno en La EFDocumento18 pagineDipl Pyme-Gobierno en La EFDiego Vega HernándezNessuna valutazione finora
- Métodos Flujo de Potencia SEPDocumento11 pagineMétodos Flujo de Potencia SEPDiego Vega Hernández0% (1)
- Cuestionario GTODocumento4 pagineCuestionario GTODiego Vega HernándezNessuna valutazione finora
- G.S Regimen Transiente - Dinámica de MáquinasDocumento21 pagineG.S Regimen Transiente - Dinámica de MáquinasDiego Vega HernándezNessuna valutazione finora
- Electrónica de Potencia - Cuk ConverterDocumento11 pagineElectrónica de Potencia - Cuk ConverterDiego Vega HernándezNessuna valutazione finora
- Dotacion y Elementos de Proteccion PersonalDocumento7 pagineDotacion y Elementos de Proteccion PersonalKaren100% (1)
- Calculo de EntalpiasDocumento2 pagineCalculo de EntalpiasDaiana PierottiNessuna valutazione finora
- Propiedades Psicométricas Del Inventario de Ansiedad Estado yDocumento9 paginePropiedades Psicométricas Del Inventario de Ansiedad Estado ySeleccion PersonalNessuna valutazione finora
- Proyecto Invernadero Por PIDDocumento20 pagineProyecto Invernadero Por PIDAlejandro GonzalezNessuna valutazione finora
- Practicas Ciclos, Secuenciales, Arreglos y CondicionalesDocumento41 paginePracticas Ciclos, Secuenciales, Arreglos y CondicionalesLucero Sánchez HernándezNessuna valutazione finora
- Balances de EnergíaDocumento28 pagineBalances de EnergíaAgustín BonilloNessuna valutazione finora
- Clasificacion de Los Numeros Cuanticos para Quinto de Secundaria PDFDocumento4 pagineClasificacion de Los Numeros Cuanticos para Quinto de Secundaria PDFBertha Rendon100% (1)
- Mat 1102C - 1-2GFKFGKFKFKKFDocumento5 pagineMat 1102C - 1-2GFKFGKFKFKKFgabriel sarzuriNessuna valutazione finora
- EjerciciosDocumento3 pagineEjerciciosJessica Vizcaya100% (1)
- COSODocumento154 pagineCOSOmikeNessuna valutazione finora
- Arquímedes y Los Maestros de La Escuela de AlejandriaDocumento31 pagineArquímedes y Los Maestros de La Escuela de Alejandriaperelman4690100% (1)
- Laboratorio 2 Centro de MasaDocumento7 pagineLaboratorio 2 Centro de MasaPaola SánchezNessuna valutazione finora
- Planificación de MatemáticaDocumento7 paginePlanificación de MatemáticaLigia RuanoNessuna valutazione finora
- Actividad Semana 1 - Attempt Review2Documento9 pagineActividad Semana 1 - Attempt Review2Joao RuizNessuna valutazione finora
- Peirce y La Escolástica HispánicaDocumento40 paginePeirce y La Escolástica Hispánicafredy ruilova lituma100% (2)
- Diseño Del Proyecto de InvestigaciónDocumento3 pagineDiseño Del Proyecto de InvestigaciónKrystabel Oralia Martinez MontalvoNessuna valutazione finora
- Fisica LaboratorioDocumento10 pagineFisica LaboratorioMarcelo Herrera SanchezNessuna valutazione finora
- Analisis de Cuencas Visuales Con ENVI 5.3 y ArcSceneDocumento15 pagineAnalisis de Cuencas Visuales Con ENVI 5.3 y ArcSceneIvan JaenNessuna valutazione finora
- Filosofía Del Lenguaje de Platón - TraducidoDocumento12 pagineFilosofía Del Lenguaje de Platón - Traducidomsva88100% (1)
- Cubos de KohsDocumento4 pagineCubos de KohsCristina AndreaNessuna valutazione finora
- Tarea Iii Ejercicio Sobre SucesionesDocumento6 pagineTarea Iii Ejercicio Sobre SucesionesIngris Maria Quiñonez de AlfonsecaNessuna valutazione finora
- Ejercicios ResueltosDocumento178 pagineEjercicios ResueltosBryanPatrick50% (2)
- Sistemas NuméricosDocumento46 pagineSistemas NuméricosIsotopos RadiactivosNessuna valutazione finora
- Tarea 1 - Operaciones Básicas de Señales y Sistemas Continuos yDocumento12 pagineTarea 1 - Operaciones Básicas de Señales y Sistemas Continuos yEsteban RodriguezNessuna valutazione finora
- Notas Met 1 2014Documento85 pagineNotas Met 1 2014anacorreaNessuna valutazione finora
- SilogismoDocumento11 pagineSilogismoCesar PalenciaNessuna valutazione finora
- GTC137Documento15 pagineGTC137Robert Gutierrez RNessuna valutazione finora
- Olimpiada de Mayo XIV - XVIIDocumento8 pagineOlimpiada de Mayo XIV - XVIIviterickNessuna valutazione finora
- Hoja de Trabajo #30 - TrigonometriaDocumento3 pagineHoja de Trabajo #30 - Trigonometriamaximiliano cajo segundoNessuna valutazione finora
- Constrastación de Hipótesis 2Documento27 pagineConstrastación de Hipótesis 2Gladys CNessuna valutazione finora