Potrebbero piacerti anche
- Mecanismo Biela-Manivela (Matlab)Documento27 pagineMecanismo Biela-Manivela (Matlab)José AlvaroNessuna valutazione finora
- Excentrica 3Documento3 pagineExcentrica 3Aliberth MolinaNessuna valutazione finora
- Biela ManivelaDocumento9 pagineBiela ManivelaJorge Loro TafuriñoNessuna valutazione finora
- Relacion Biela Manivela Informe 04Documento12 pagineRelacion Biela Manivela Informe 04露 エブリンNessuna valutazione finora
- Sierra Vertical ProyectoDocumento12 pagineSierra Vertical ProyectoMatias VeraNessuna valutazione finora
- Mecanismo Tipo Biela ManivelaDocumento8 pagineMecanismo Tipo Biela ManivelaJean Carlos Lopez GarciaNessuna valutazione finora
- Reporte de LevaDocumento8 pagineReporte de LevaSayil Mendoza TrujilloNessuna valutazione finora
- Levas 2Documento14 pagineLevas 2yordi_1Nessuna valutazione finora
- Usos y Aplicaciones de La ManivelaDocumento6 pagineUsos y Aplicaciones de La ManivelaJorgeZamudio0% (1)
- Biela Manivela Con CorrederaDocumento9 pagineBiela Manivela Con Correderamariin marin perezNessuna valutazione finora
- Mecanismos de 5 BarrasDocumento13 pagineMecanismos de 5 BarrasKerly Zarith Pérez Chapeta100% (1)
- Arbol de LevasDocumento6 pagineArbol de LevasJose MoraNessuna valutazione finora
- Reporte de MecanismosDocumento6 pagineReporte de MecanismosTony SantamariaNessuna valutazione finora
- Elementos Mecánicos PruebaDocumento63 pagineElementos Mecánicos Pruebajavier_tocaNessuna valutazione finora
- Descripcion de MecanismosDocumento21 pagineDescripcion de MecanismosEfra BlancoNessuna valutazione finora
- Historia de Los MecanismosDocumento5 pagineHistoria de Los MecanismosGus LópezNessuna valutazione finora
- Sistemas de LevanteDocumento2 pagineSistemas de Levantepatricio mirandaNessuna valutazione finora
- Presentacion Del MecanismoDocumento11 paginePresentacion Del MecanismoJean Pier Fuentes ZevallosNessuna valutazione finora
- Biela Manivela CorrederaDocumento10 pagineBiela Manivela CorrederaWilson Cubur100% (1)
- Teoria Mecanismos PDFDocumento16 pagineTeoria Mecanismos PDFJirlyeRNessuna valutazione finora
- Corredera Biella-ManivelaDocumento15 pagineCorredera Biella-Manivelak19011Nessuna valutazione finora
- Monografia de LevasDocumento12 pagineMonografia de LevasArturo FloresNessuna valutazione finora
- Practicas de Mecanismos 1 PDFDocumento27 paginePracticas de Mecanismos 1 PDFIvan Velazquez HdzNessuna valutazione finora
- Biela ManivelaDocumento8 pagineBiela ManivelaJorge Loro TafuriñoNessuna valutazione finora
- Transmision de MovimientoDocumento71 pagineTransmision de MovimientoJuanFrankFerbans100% (1)
- Mecanismo Biela Manivela 1Documento16 pagineMecanismo Biela Manivela 1Luis HernándezNessuna valutazione finora
- Engranajes y FuerzasDocumento166 pagineEngranajes y FuerzasNinjaNessuna valutazione finora
- BielaDocumento15 pagineBielaEvel David Maurera CastroNessuna valutazione finora
- ActividadMecanismos U3Documento29 pagineActividadMecanismos U3Pepe SanchezNessuna valutazione finora
- Elementos de Sujeccion 2Documento18 pagineElementos de Sujeccion 2Jorge IbanezNessuna valutazione finora
- Reporte TecnicoDocumento21 pagineReporte TecnicoGasparNessuna valutazione finora
- Barras Articuladas y Mecanismo de Biela Y MANIVELADocumento11 pagineBarras Articuladas y Mecanismo de Biela Y MANIVELAEthel GeraldineNessuna valutazione finora
- Levas y EngranajesDocumento89 pagineLevas y EngranajeswellsperkeitaroNessuna valutazione finora
- Trabajo Ciclo Otto BielasDocumento9 pagineTrabajo Ciclo Otto BielasAnthony ToledoNessuna valutazione finora
- Levas HENRYCDocumento24 pagineLevas HENRYCJuanifer CortezNessuna valutazione finora
- MEcanismo Biela-ManivelaDocumento8 pagineMEcanismo Biela-ManivelaAlejandro GamboaNessuna valutazione finora
- Semana 12Documento26 pagineSemana 12César Enrique Lázaro ApolinarioNessuna valutazione finora
- Tipos de LevasDocumento5 pagineTipos de LevasJaimeGabrielChifundoBarrettNessuna valutazione finora
- Clase de LevasDocumento27 pagineClase de LevasRoger PrzNessuna valutazione finora
- Proyecto de Cinematica y Cinetica de Un MecanismoDocumento13 pagineProyecto de Cinematica y Cinetica de Un MecanismomanuelNessuna valutazione finora
- Informe Biela ManivelaDocumento5 pagineInforme Biela ManivelaJossj93Nessuna valutazione finora
- MecanismosDocumento6 pagineMecanismosBart BouvierNessuna valutazione finora
- MecanismosDocumento17 pagineMecanismosCristian AparicioNessuna valutazione finora
- Unidad 1. Conseptos Fundamentales.Documento16 pagineUnidad 1. Conseptos Fundamentales.Oscar Ulises Martínez PalaciosNessuna valutazione finora
- Grua TorreDocumento6 pagineGrua TorreFranCanavNessuna valutazione finora
- Tema 05 Transformadores de Movimiento en La Maquinaria Industrial B - 2024-0Documento22 pagineTema 05 Transformadores de Movimiento en La Maquinaria Industrial B - 2024-0alesandroc925Nessuna valutazione finora
- Biela y ManivelaDocumento4 pagineBiela y ManivelaJuan Carlos Barrios NunezNessuna valutazione finora
- Mecanismo Biela-ManivelaDocumento9 pagineMecanismo Biela-ManivelaStiven Vidal Sucasaca PeredoNessuna valutazione finora
- Asdadasdsadasdasdmecanismo Generador de ElipsesDocumento6 pagineAsdadasdsadasdasdmecanismo Generador de ElipsesArtemio SanchezNessuna valutazione finora
- Proyecto MecanismosDocumento46 pagineProyecto MecanismosFernandoLopezNessuna valutazione finora
- Leva MecanicaDocumento37 pagineLeva MecanicaMokona Akatsuki0% (1)
- Levas 4.4Documento15 pagineLevas 4.4Poder JovenNessuna valutazione finora
- Laboratorio-N4 Relacion Biela CigueñalDocumento11 pagineLaboratorio-N4 Relacion Biela CigueñalAnonymous DhCbvWxYrNessuna valutazione finora
- Cruz de MaltaDocumento13 pagineCruz de MaltaMarco Antonio Cruz MoralesNessuna valutazione finora
- Practica 1 Lab. Diseño de MecanismosDocumento18 paginePractica 1 Lab. Diseño de MecanismosTeodoro AlvaradoNessuna valutazione finora
- Mecanismo de Transmision-FresadoraDocumento23 pagineMecanismo de Transmision-FresadoraLuis100% (1)
- Ejercicios de Integrales de Línea, Superficie y VolumenDa EverandEjercicios de Integrales de Línea, Superficie y VolumenValutazione: 4 su 5 stelle4/5 (2)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209Da EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Valutazione: 5 su 5 stelle5/5 (2)
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Da EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Nessuna valutazione finora
- Tipicos de Diagramade LazoDocumento12 pagineTipicos de Diagramade LazoEnrique Santiago MaldonadoNessuna valutazione finora
- Base de Datos Proyecto HeladeriaDocumento2 pagineBase de Datos Proyecto HeladeriaEnrique Santiago Maldonado0% (1)
- PROYECTO HeladeriaDocumento11 paginePROYECTO HeladeriaEnrique Santiago Maldonado100% (2)
- TC4 Diagramas Bloque PDFDocumento16 pagineTC4 Diagramas Bloque PDFEnrique Santiago MaldonadoNessuna valutazione finora
- Vanos de Gran Longitud Con Apoyos Al Mismo NivelDocumento26 pagineVanos de Gran Longitud Con Apoyos Al Mismo NivelEnrique Santiago MaldonadoNessuna valutazione finora
- Final Biela Manivela Frnakstaiein 2016Documento7 pagineFinal Biela Manivela Frnakstaiein 2016Enrique Santiago MaldonadoNessuna valutazione finora
- Informe 5 Maquinas Electricas 1 Estructura y Materiales en Las Maquinas Electricas EstaticasDocumento12 pagineInforme 5 Maquinas Electricas 1 Estructura y Materiales en Las Maquinas Electricas EstaticasEnrique Santiago MaldonadoNessuna valutazione finora
- GUIA 5 Circuitos Eléctricos2Documento6 pagineGUIA 5 Circuitos Eléctricos2Enrique Santiago MaldonadoNessuna valutazione finora
- Rectificador de Media OndaDocumento24 pagineRectificador de Media OndaEnrique Santiago MaldonadoNessuna valutazione finora
- Sistemas Secuenciales 1Documento86 pagineSistemas Secuenciales 1Enrique Santiago MaldonadoNessuna valutazione finora
- Lyophilizer IntroductionDocumento16 pagineLyophilizer IntroductionOrlando Castro100% (1)
- Tabla de Torque PDFDocumento1 paginaTabla de Torque PDFSergio Martínez De JesúsNessuna valutazione finora
- Alternador HTM PDFDocumento12 pagineAlternador HTM PDFJio Ichigo KenshiroNessuna valutazione finora
- Modulo Operacion RetroexcavadoraDocumento126 pagineModulo Operacion Retroexcavadorapunzeta_81100% (1)
- Tipos de Rodamientos Edgar SanabriaDocumento20 pagineTipos de Rodamientos Edgar SanabriaEdgar Sanabria PNessuna valutazione finora
- Segundo Informe Motores y TractoresDocumento9 pagineSegundo Informe Motores y TractoresOscar Leyva100% (1)
- Taller de RefuerzoDocumento24 pagineTaller de RefuerzoEsneider PuertaNessuna valutazione finora
- PROBPROPUESTOSDocumento11 paginePROBPROPUESTOSYanira Clavijo HernandezNessuna valutazione finora
- Curso Mecanica Automotriz Cilindros Hidraulicos PDFDocumento9 pagineCurso Mecanica Automotriz Cilindros Hidraulicos PDFJ Zito JefferxitoNessuna valutazione finora
- Informe Alineamiento Sala de Bombas N1070 - 13 Mayo 2013Documento12 pagineInforme Alineamiento Sala de Bombas N1070 - 13 Mayo 2013Alejandro Castro ArroyoNessuna valutazione finora
- Editar y AgregarDocumento20 pagineEditar y AgregarMiguel Alberto Puch SanchezNessuna valutazione finora
- UNIDAD III Instrumentacion Ene 2020Documento27 pagineUNIDAD III Instrumentacion Ene 2020jesusNessuna valutazione finora
- Sol. Ejer. Prop. de Física IDocumento5 pagineSol. Ejer. Prop. de Física IAzcarate JavierNessuna valutazione finora
- Lab 02 Sen Act 2020 ADocumento9 pagineLab 02 Sen Act 2020 AEddy Santiago Neira SisaNessuna valutazione finora
- MR 448 Fluence 2Documento83 pagineMR 448 Fluence 2carrizofNessuna valutazione finora
- 5963 Experta ManualDocumento10 pagine5963 Experta ManualTinroadNessuna valutazione finora
- Trabajo Mecanico - Sesion 6Documento4 pagineTrabajo Mecanico - Sesion 6Rosita LópezNessuna valutazione finora
- CRDI SiemensDocumento1 paginaCRDI SiemensStephenakd13Nessuna valutazione finora
- 7 RodamientosDocumento77 pagine7 RodamientosteodoroNessuna valutazione finora
- Catalogo Cabezal Motor Tanquq Marzo 2017Documento14 pagineCatalogo Cabezal Motor Tanquq Marzo 2017Marco Antonio Chicatto HernándezNessuna valutazione finora
- Evidencia Punto 7Documento3 pagineEvidencia Punto 7fercho lopezNessuna valutazione finora
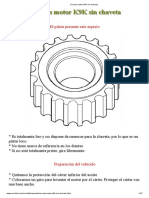
- Correas Motor K9K Sin ChavetaDocumento12 pagineCorreas Motor K9K Sin ChavetaLuis PeruleroNessuna valutazione finora
- Guia Examen ExtraordinarioDocumento3 pagineGuia Examen ExtraordinarioJesús PardoNessuna valutazione finora
- h550-700hds TG Lam SpanishDocumento8 pagineh550-700hds TG Lam SpanishIngenieria InnovateckNessuna valutazione finora
- Sistema de Combustible Diesel Cummins PTDocumento202 pagineSistema de Combustible Diesel Cummins PTarnold100% (2)
- Cartilla de Mantenimiento - MGRHDocumento2 pagineCartilla de Mantenimiento - MGRHDheverlynt Patilla HuanayNessuna valutazione finora
- Biela ManivelaDocumento11 pagineBiela ManivelaDarlin MadridNessuna valutazione finora
- KPI RPSA PLS Assembly - 1.16.20Documento51 pagineKPI RPSA PLS Assembly - 1.16.20Frank RojasNessuna valutazione finora
- Tarea 1 ElectricidadDocumento6 pagineTarea 1 Electricidadjose cesar moyotlNessuna valutazione finora
- REPORT - 470 Proyecto de VistaDocumento50 pagineREPORT - 470 Proyecto de VistaVivi CoronelNessuna valutazione finora