Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- R2 Ch1 SolnsDocumento14 pagineR2 Ch1 SolnsMD AJMAL100% (1)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- January 2023: On Field Investment ResearchDocumento39 pagineJanuary 2023: On Field Investment ResearchPavel VeselovNessuna valutazione finora
- Code of Practice - CO2 RefrigerationDocumento67 pagineCode of Practice - CO2 RefrigerationnasierrasNessuna valutazione finora
- Carbon Footprints of Tyre Production - New Versus RemanufacturedDocumento29 pagineCarbon Footprints of Tyre Production - New Versus RemanufacturedLucky Ginanjar Adhipurna100% (1)
- Certificate Updated - Vedic MathsDocumento2 pagineCertificate Updated - Vedic MathsPrasad GnrNessuna valutazione finora
- 19345Documento41 pagine19345Prasad GnrNessuna valutazione finora
- Certificate Updated - Vedic MathsDocumento2 pagineCertificate Updated - Vedic MathsPrasad GnrNessuna valutazione finora
- Certificate Updated - Vedic MathsDocumento2 pagineCertificate Updated - Vedic MathsPrasad GnrNessuna valutazione finora
- MCA 4th Sem MCSP-044 Assignment 2016-17 PDFDocumento2 pagineMCA 4th Sem MCSP-044 Assignment 2016-17 PDFAparna GoliNessuna valutazione finora
- MCA 3rd Sem MCSL-036 Ssignment 2016-17Documento2 pagineMCA 3rd Sem MCSL-036 Ssignment 2016-17Aparna GoliNessuna valutazione finora
- GNRPDocumento3 pagineGNRPPrasad GnrNessuna valutazione finora
- Chaitanaya Bharthi Institute of Technolgoy: Part BDocumento8 pagineChaitanaya Bharthi Institute of Technolgoy: Part BPrasad GnrNessuna valutazione finora
- Inventory Management SystemDocumento1 paginaInventory Management SystemPrasad GnrNessuna valutazione finora
- Block 1 (Main)Documento68 pagineBlock 1 (Main)Brenda CoxNessuna valutazione finora
- Fhs NotesDocumento16 pagineFhs NotessurajpopatNessuna valutazione finora
- Project GuidanceDocumento17 pagineProject GuidanceTulsi MahtoNessuna valutazione finora
- Karuna ProjDocumento57 pagineKaruna ProjPrasad GnrNessuna valutazione finora
- Mba TheoryDocumento2 pagineMba TheoryPrasad GnrNessuna valutazione finora
- Vnjy0 LargeScale Solar Power Systems Construction and EconomicsDocumento402 pagineVnjy0 LargeScale Solar Power Systems Construction and EconomicsIfeanyi Ezemonye-Agwuegbo100% (1)
- HDS DAC Does It AllDocumento5 pagineHDS DAC Does It Allkyle celioNessuna valutazione finora
- Air PollutionDocumento13 pagineAir PollutionJohn AjishNessuna valutazione finora
- Fire Extinguisher: Home About Us Product Contact UsDocumento3 pagineFire Extinguisher: Home About Us Product Contact UsaditNessuna valutazione finora
- Dry Ice Pelletizer A30P D3Documento4 pagineDry Ice Pelletizer A30P D3Zoran TatarevicNessuna valutazione finora
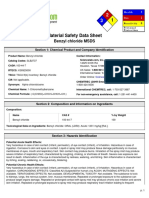
- Benzyl Chloride MSDS: Section 1: Chemical Product and Company IdentificationDocumento6 pagineBenzyl Chloride MSDS: Section 1: Chemical Product and Company IdentificationYojana SonawaneNessuna valutazione finora
- Activity Booklet Science 10th 2023Documento41 pagineActivity Booklet Science 10th 2023Kajal GuptaNessuna valutazione finora
- Nitrogen Use in Food Processing & Packaging2Documento50 pagineNitrogen Use in Food Processing & Packaging2Inertech ProjectsNessuna valutazione finora
- Case StudiesDocumento30 pagineCase Studiessiachen260% (1)
- Methods For Improving The Microstructure of Recycled Concrete Aggregate - A ReviewDocumento18 pagineMethods For Improving The Microstructure of Recycled Concrete Aggregate - A ReviewMO AbdulkareemNessuna valutazione finora
- Qcs 2010 Section 11 Part 1.7 Regulatory Document - FIRE and FLAMMABLEDocumento75 pagineQcs 2010 Section 11 Part 1.7 Regulatory Document - FIRE and FLAMMABLEbryanpastor106100% (1)
- CarbonUT Industrial Affiliate ProgramDocumento2 pagineCarbonUT Industrial Affiliate Programahmed el faramawyNessuna valutazione finora
- Vacuum Insulated CO2Documento13 pagineVacuum Insulated CO2dragosm78Nessuna valutazione finora
- 2 FM200 ComponentsDocumento40 pagine2 FM200 ComponentsJose Antonio Lara0% (1)
- Teachers Guidebook CCE Whole GuideDocumento375 pagineTeachers Guidebook CCE Whole GuideJedy Tah0% (1)
- Inergen 150 Bar System SpecificationDocumento2 pagineInergen 150 Bar System SpecificationDragan CvetkovićNessuna valutazione finora
- BIOL 002 Global Warming: Beirut Arab University Faculty of Science Department of BiologyDocumento65 pagineBIOL 002 Global Warming: Beirut Arab University Faculty of Science Department of BiologyYoumna ShatilaNessuna valutazione finora
- Simple Method of ABGs InterpretationDocumento9 pagineSimple Method of ABGs Interpretationjhorn_appleNessuna valutazione finora
- CarbonCure Ready Mixed Design Guide - WebDocumento5 pagineCarbonCure Ready Mixed Design Guide - WebPasu_08Nessuna valutazione finora
- G STS - Lesson 4.2Documento4 pagineG STS - Lesson 4.2IkeeNessuna valutazione finora
- A Compare Review About Equilibrium Conditions of Semi Clathrate Hydrate: Experimental Measurements Visions and Thermodynamic Modeling AspectsDocumento21 pagineA Compare Review About Equilibrium Conditions of Semi Clathrate Hydrate: Experimental Measurements Visions and Thermodynamic Modeling Aspectshaha yeahNessuna valutazione finora
- Honors Chemistry Semester 1 ProjectDocumento7 pagineHonors Chemistry Semester 1 Projectapi-239401136Nessuna valutazione finora
- Carbon Footprint in Textile IndustriesDocumento13 pagineCarbon Footprint in Textile Industriessatishpatil819gmailcNessuna valutazione finora
- Chris Wold, David Hunter & Melissa Powers, Climate Change and The LawDocumento71 pagineChris Wold, David Hunter & Melissa Powers, Climate Change and The LawccrissNessuna valutazione finora
- Chemical Principles 8th Edition Zumdahl Solutions ManualDocumento35 pagineChemical Principles 8th Edition Zumdahl Solutions Manualdement.disturnlklpvp95% (22)
- J Scitotenv 2020 137594Documento42 pagineJ Scitotenv 2020 137594anusoumyaNessuna valutazione finora