Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Water Chiller SystemDocumento19 pagineWater Chiller SystemAlok kumar92% (24)
- Air CarDocumento35 pagineAir CarPratap SwainNessuna valutazione finora
- Soumya 'S ResumeDocumento2 pagineSoumya 'S ResumePratap SwainNessuna valutazione finora
- Air CarDocumento35 pagineAir CarPratap SwainNessuna valutazione finora
- Powerpoint Hybrid VehiclesDocumento29 paginePowerpoint Hybrid VehiclesPratap SwainNessuna valutazione finora
- Ocean Thermal Energy ConversionDocumento15 pagineOcean Thermal Energy ConversionPratap SwainNessuna valutazione finora
- Energy Conversion and ManagementDocumento23 pagineEnergy Conversion and ManagementPratap SwainNessuna valutazione finora
- "Energy Conservation and Management": A Seminar Report ONDocumento7 pagine"Energy Conservation and Management": A Seminar Report ONPratap SwainNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Atc Energies System Private Limited" Are TheDocumento9 pagineAtc Energies System Private Limited" Are TheFAB squadNessuna valutazione finora
- The Electric Vehicle: A Review: International Journal of Electric and Hybrid Vehicles January 2017Documento19 pagineThe Electric Vehicle: A Review: International Journal of Electric and Hybrid Vehicles January 2017Shyam VsNessuna valutazione finora
- Electric Vehicle Training FinalDocumento150 pagineElectric Vehicle Training Finalyouane bayouNessuna valutazione finora
- Comparative Study of Solid-State Reaction and Sol-Gel ProcessDocumento6 pagineComparative Study of Solid-State Reaction and Sol-Gel ProcessMaria OktaviaNessuna valutazione finora
- Infineon Designing Li ION Battery Chargers Article Whitepaper v01 00 enDocumento4 pagineInfineon Designing Li ION Battery Chargers Article Whitepaper v01 00 enfegyo123Nessuna valutazione finora
- Power SystemDocumento21 paginePower SystemHaziq IsmailNessuna valutazione finora
- Stryker Prime Stretcher 1115 Hospital Bed - User ManualDocumento93 pagineStryker Prime Stretcher 1115 Hospital Bed - User ManualBiancaNessuna valutazione finora
- User Manual - Ruide RTK R90-TDocumento26 pagineUser Manual - Ruide RTK R90-TMarcelo PeixotoNessuna valutazione finora
- Datasheet Bateria Ion Litio - LIR18650-2000mahDocumento6 pagineDatasheet Bateria Ion Litio - LIR18650-2000mahWagner BaccanNessuna valutazione finora
- Battery & Charger: Lithium-IonDocumento2 pagineBattery & Charger: Lithium-Ionwill wuNessuna valutazione finora
- 2023-RoboBoat Team-Handbook v1.0Documento35 pagine2023-RoboBoat Team-Handbook v1.0Ahmed MohamedNessuna valutazione finora
- Symmetry 15 01322Documento30 pagineSymmetry 15 01322imagine dragonNessuna valutazione finora
- Revision J - September 21, 2020Documento24 pagineRevision J - September 21, 2020alifNessuna valutazione finora
- Solar Power Auto Irrigation SystemDocumento36 pagineSolar Power Auto Irrigation Systemakshay sajwan100% (1)
- Electric Vehicle Standardization Progress in IndonesiaDocumento26 pagineElectric Vehicle Standardization Progress in IndonesiaMauleni BudiartiNessuna valutazione finora
- MPD 600 TransformerTest User Manual ENUDocumento41 pagineMPD 600 TransformerTest User Manual ENURajdgurkNessuna valutazione finora
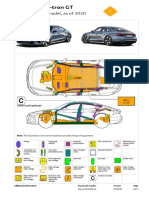
- Audi Rescue Data Sheets (E-Tron GT - Sportback - 2020 - 5d - Electric - EN)Documento4 pagineAudi Rescue Data Sheets (E-Tron GT - Sportback - 2020 - 5d - Electric - EN)caragan1970Nessuna valutazione finora
- Facility Evs30-5830703Documento17 pagineFacility Evs30-5830703yogendra49Nessuna valutazione finora
- Project Reports ListDocumento304 pagineProject Reports ListManish PatelNessuna valutazione finora
- MVKF25-vt17 BatPackDesDocumento89 pagineMVKF25-vt17 BatPackDesschoolNessuna valutazione finora
- Lithium Ion Battery Atid1Documento11 pagineLithium Ion Battery Atid1Nguyễn TiếnNessuna valutazione finora
- A Systems Approach To Lithium-Ion Battery Management (PDFDrive)Documento301 pagineA Systems Approach To Lithium-Ion Battery Management (PDFDrive)Pradeep PolavarpuNessuna valutazione finora
- Smart Glasses Augmented Reality: April 2021Documento5 pagineSmart Glasses Augmented Reality: April 2021علي السجاد خضير عباس اللاميNessuna valutazione finora
- Types of Batteries: Nickel Cadmium (Ni-Cd)Documento14 pagineTypes of Batteries: Nickel Cadmium (Ni-Cd)Raghvendra ChauhanNessuna valutazione finora
- Automotive Batteries 101: WMG, University of WarwickDocumento24 pagineAutomotive Batteries 101: WMG, University of WarwickAliNessuna valutazione finora
- Aircraft Fire Extinguishing SystemsDocumento3 pagineAircraft Fire Extinguishing SystemsDibyendu SahuNessuna valutazione finora
- E.1. Research Report EV Range Testing FINAL 1 9 19 PDFDocumento66 pagineE.1. Research Report EV Range Testing FINAL 1 9 19 PDFEdwin SilvaNessuna valutazione finora
- Lithium Storage and Maintenance RecommendationsDocumento2 pagineLithium Storage and Maintenance RecommendationsBALANessuna valutazione finora
- Material Safety Data Sheet: Sho - Life - Msds001-Transportation, Date of Issue: Page 1of 5Documento5 pagineMaterial Safety Data Sheet: Sho - Life - Msds001-Transportation, Date of Issue: Page 1of 5titnsla100% (1)
- Installation Operation and Maintenance of Solar PV Microgrid Systems A Handbook For TechniciansDocumento139 pagineInstallation Operation and Maintenance of Solar PV Microgrid Systems A Handbook For TechniciansYousef YaserNessuna valutazione finora