Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Aiaa 32130 392 PDFDocumento7 pagineAiaa 32130 392 PDFDaniel Balan LangatNessuna valutazione finora
- Ada 428039Documento75 pagineAda 428039JoseramirezjlrtNessuna valutazione finora
- Ansys Cfx-Pre Users GuideDocumento386 pagineAnsys Cfx-Pre Users GuideBhaskar NandiNessuna valutazione finora
- AMC A3 Inventor TemplateDocumento1 paginaAMC A3 Inventor TemplateDaniel Balan LangatNessuna valutazione finora
- ITTC - Recommended Procedures and Guidelines: Practical Guidelines For Ship CFD ApplicationsDocumento18 pagineITTC - Recommended Procedures and Guidelines: Practical Guidelines For Ship CFD ApplicationsHamed HmNessuna valutazione finora
- Resistance ManualDocumento71 pagineResistance ManualDaniel Balan LangatNessuna valutazione finora
- Review of P-Y Relationships in Cohesionless SoilDocumento33 pagineReview of P-Y Relationships in Cohesionless SoilMalik RizwanNessuna valutazione finora
- Hot and Cold Water DespensorDocumento6 pagineHot and Cold Water DespensorMohamedFasilNessuna valutazione finora
- User Instruction HIC402A - 404A - 406A - 408A - 410A - 412A - 416ADocumento2 pagineUser Instruction HIC402A - 404A - 406A - 408A - 410A - 412A - 416AHamd1971Nessuna valutazione finora
- Post Test Gas LawDocumento5 paginePost Test Gas LawSmb RichieNessuna valutazione finora
- 1.1 Basic Rankine Cycle and Its ModificationsDocumento20 pagine1.1 Basic Rankine Cycle and Its Modificationskarthikeyan SNessuna valutazione finora
- Fire Science, Fire Behaviour & Fire Growth Curve - OptimizeDocumento193 pagineFire Science, Fire Behaviour & Fire Growth Curve - OptimizeHSE CRECNessuna valutazione finora
- Spin Orientation During Acrylic Fiber FormationDocumento20 pagineSpin Orientation During Acrylic Fiber FormationGurjinder SinghNessuna valutazione finora
- 3-1. Hydraulic SystemDocumento35 pagine3-1. Hydraulic SystemSumitomo ExcavatorNessuna valutazione finora
- Hancock Et Al 1994 DB Curves PaperDocumento18 pagineHancock Et Al 1994 DB Curves Paperclam2014Nessuna valutazione finora
- Two Way Slab Design.Documento9 pagineTwo Way Slab Design.tuansteelsNessuna valutazione finora
- MTG Chemistry Class 11 CH 6Documento10 pagineMTG Chemistry Class 11 CH 687vnqbkqkcNessuna valutazione finora
- Thermal Expansion CalculationDocumento6 pagineThermal Expansion CalculationAdipati Syahidullah Ulini'amNessuna valutazione finora
- Shallow Foundations Basic Solved ProblemsDocumento19 pagineShallow Foundations Basic Solved ProblemsadilbakriabdullahNessuna valutazione finora
- Chapter 8: Convection in External Turbulent Flow: - (A) Mixing ProcessesDocumento38 pagineChapter 8: Convection in External Turbulent Flow: - (A) Mixing ProcessesephremNessuna valutazione finora
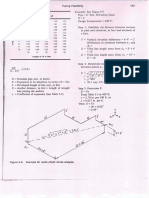
- Pipe Line Flexibility Manual CalculationDocumento20 paginePipe Line Flexibility Manual CalculationKagira Drawing Soltuion100% (3)
- Heat Recovery Steam Generator 5Documento29 pagineHeat Recovery Steam Generator 5Hitesh SinglaNessuna valutazione finora
- Lafortune - Et - Al - SMST06 - Superelasticity Related Phenomena of Shape Memory Alloy Passive DampersDocumento10 pagineLafortune - Et - Al - SMST06 - Superelasticity Related Phenomena of Shape Memory Alloy Passive DamperspilafaNessuna valutazione finora
- Rumus Perhitungan Turbin UapDocumento17 pagineRumus Perhitungan Turbin Uapricki yusufNessuna valutazione finora
- Reciprocating Compressors (PDF)Documento15 pagineReciprocating Compressors (PDF)Shashank Muduli33% (3)
- Output Summary: SI UnitsDocumento14 pagineOutput Summary: SI UnitsEduardoNessuna valutazione finora
- Mech Nonlin Mats 14.5 L01 Adv PlasticityDocumento28 pagineMech Nonlin Mats 14.5 L01 Adv PlasticityRao JanapaNessuna valutazione finora
- Examen Parcial 01 - IC - C6Documento2 pagineExamen Parcial 01 - IC - C6Bryan PerezNessuna valutazione finora
- Basic Concepts of Heat TransferDocumento3 pagineBasic Concepts of Heat TransferOsama Hasan100% (3)
- Astm 1457Documento27 pagineAstm 1457jjNessuna valutazione finora
- Rapidly Varied Flow: DR Edwin K. KandaDocumento42 pagineRapidly Varied Flow: DR Edwin K. KandaErick WanduNessuna valutazione finora
- Physics BSC QuestionDocumento31 paginePhysics BSC QuestionIsha MohadikarNessuna valutazione finora
- Temperature ControlDocumento60 pagineTemperature ControlKmilo Giraldo100% (4)
- Surface Tension PDFDocumento7 pagineSurface Tension PDFNsBhasinNessuna valutazione finora
- Thermometry MCqs Taken From Past PapersDocumento2 pagineThermometry MCqs Taken From Past PapersAli Ahmad AliNessuna valutazione finora
- Dynamic Modeling of A Deethanizer Column in A Natural Gas Processing PlantDocumento5 pagineDynamic Modeling of A Deethanizer Column in A Natural Gas Processing PlantdoufethiNessuna valutazione finora