Potrebbero piacerti anche
- Automation at Northparkes Rio TintoDocumento30 pagineAutomation at Northparkes Rio TintoAmilton filhoNessuna valutazione finora
- Assessing The Impact of Driverless Haul Trucks in Australian Surface Mining PDFDocumento10 pagineAssessing The Impact of Driverless Haul Trucks in Australian Surface Mining PDFRodrigo AndrésNessuna valutazione finora
- Mining Innovation 8apr2016Documento57 pagineMining Innovation 8apr2016cdkuea100% (1)
- Autonomous and Remote Operation Technologies in Australian MiningDocumento44 pagineAutonomous and Remote Operation Technologies in Australian MiningRamsan1004Nessuna valutazione finora
- Automation of Load Haul Dump Machines: Research ReportDocumento56 pagineAutomation of Load Haul Dump Machines: Research Reportvangoethe100% (1)
- 02 Alluvial Mining Operation - A Sustainable Guideline and PDFDocumento138 pagine02 Alluvial Mining Operation - A Sustainable Guideline and PDFGindang Rain PratamaNessuna valutazione finora
- Ilmenite - An Ore of Titanium - Uses and PropertiesDocumento5 pagineIlmenite - An Ore of Titanium - Uses and PropertieswessilissaNessuna valutazione finora
- Digitalisation Risks and Opportunities Is It Worth It Fazil IbrahimDocumento21 pagineDigitalisation Risks and Opportunities Is It Worth It Fazil IbrahimPrabhuNessuna valutazione finora
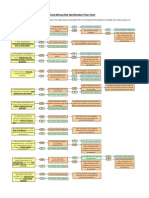
- Coal Mining Risk Identification Flow ChartDocumento1 paginaCoal Mining Risk Identification Flow ChartZ Babar Khan100% (1)
- Simulation Techniques in Oyu Tolgoi Underground Development SchedulingDocumento9 pagineSimulation Techniques in Oyu Tolgoi Underground Development SchedulingNIEVES MORALES SUBIABRENessuna valutazione finora
- Rio TintoDocumento20 pagineRio TintoSandeep PandharkarNessuna valutazione finora
- The Value of Remote Operating Centers VfinalDocumento9 pagineThe Value of Remote Operating Centers VfinalCseixas100% (1)
- Feasibility RequirementsDocumento4 pagineFeasibility RequirementsEmmanuel CaguimbalNessuna valutazione finora
- A Simulation Model For Truck-Shovel Operation PDFDocumento307 pagineA Simulation Model For Truck-Shovel Operation PDFFernando SagasteguiNessuna valutazione finora
- Hammerstone Haul Roads WebDocumento4 pagineHammerstone Haul Roads WebAnonymous FvXjyF4cT4Nessuna valutazione finora
- Integrated Strategy Optimsation For Complex OperationsDocumento8 pagineIntegrated Strategy Optimsation For Complex OperationsCarlos A. Espinoza MNessuna valutazione finora
- Open Pit Metals Xpac SolutionDocumento6 pagineOpen Pit Metals Xpac SolutionjunaifaNessuna valutazione finora
- 2013 Australian Mine Ventilation Conference HalimDocumento7 pagine2013 Australian Mine Ventilation Conference HalimDiegoNessuna valutazione finora
- Estimating Road Construction Unit CostsDocumento7 pagineEstimating Road Construction Unit CostsRoldan SuazoNessuna valutazione finora
- GLD Capitulo 11 3 y 11 4 Ultima Version 24 04 15 12 00 HDocumento74 pagineGLD Capitulo 11 3 y 11 4 Ultima Version 24 04 15 12 00 HAlvaro Torres Bozzo100% (1)
- Extracting Value and Building Resilience With Data-Led Mining in South AfricaDocumento19 pagineExtracting Value and Building Resilience With Data-Led Mining in South AfricaSd NvNessuna valutazione finora
- PMRC 131 - Mining Financial Analysis PDFDocumento26 paginePMRC 131 - Mining Financial Analysis PDFEmmanuel CaguimbalNessuna valutazione finora
- Mineral Property ValuationDocumento9 pagineMineral Property Valuationinv_gradeNessuna valutazione finora
- Mine ManagementDocumento7 pagineMine ManagementBranden OxfordNessuna valutazione finora
- Full Paper Freiberg Conference 2013Documento8 pagineFull Paper Freiberg Conference 2013jlzmotricoNessuna valutazione finora
- Waste Dump OptimisationDocumento8 pagineWaste Dump OptimisationDody100% (1)
- Metals Sector - Value ChainDocumento11 pagineMetals Sector - Value ChainAmitOtwaniNessuna valutazione finora
- TAILSAFE Legislation and Regulation PDFDocumento68 pagineTAILSAFE Legislation and Regulation PDFFlávia GomesNessuna valutazione finora
- Optimization of Truck Loader Haulage System in An Underground Mine A Simulation Approach Using SimMineDocumento10 pagineOptimization of Truck Loader Haulage System in An Underground Mine A Simulation Approach Using SimMineYorianNessuna valutazione finora
- Estimation of Incremental Haulage Costs by Mining Historical Data and Their Influence in The Final Pit Definition PDFDocumento6 pagineEstimation of Incremental Haulage Costs by Mining Historical Data and Their Influence in The Final Pit Definition PDFGaluizu001Nessuna valutazione finora
- Surface Mining Technology - Progress and ProspectsDocumento13 pagineSurface Mining Technology - Progress and ProspectsDiego Matías Gonzalez PizarroNessuna valutazione finora
- MANAGING ACID Mine DrainageDocumento108 pagineMANAGING ACID Mine Drainagenathansolai100% (1)
- Open Cast Blasting Improvements - Gerhard StenzellDocumento82 pagineOpen Cast Blasting Improvements - Gerhard StenzellRudianto SitanggangNessuna valutazione finora
- GIS For Asset ManagementDocumento78 pagineGIS For Asset ManagementZaheer DoomahNessuna valutazione finora
- PWC School of Mines How To Operate A Cost Effective MinDocumento41 paginePWC School of Mines How To Operate A Cost Effective MinCarlos A. Espinoza M100% (2)
- Leaching of A Cu-Co OreDocumento7 pagineLeaching of A Cu-Co OreEDWIN LEONARDO ESPINOZA PACHECONessuna valutazione finora
- Mine Maintenance - The Cost of OperationDocumento11 pagineMine Maintenance - The Cost of OperationJon CarbonNessuna valutazione finora
- Digitizing Underground MiningDocumento5 pagineDigitizing Underground MiningRizky PratamaNessuna valutazione finora
- Ventilation InnovationDocumento2 pagineVentilation InnovationAnang Ma'rupNessuna valutazione finora
- Remote Operations Centres - Lessons From Other Industries: October 2007Documento19 pagineRemote Operations Centres - Lessons From Other Industries: October 2007Commence NkomoNessuna valutazione finora
- Real-Time Mining - Project - OverviewDocumento47 pagineReal-Time Mining - Project - OverviewMário de FreitasNessuna valutazione finora
- Whittle Integrated Strategic Planning: ServicesDocumento9 pagineWhittle Integrated Strategic Planning: ServicesEnkhchimeg SarankhuuNessuna valutazione finora
- Oyu Tolgoi Oct 2014Documento547 pagineOyu Tolgoi Oct 2014Carlos A. Espinoza MNessuna valutazione finora
- Management of Tailings and Waste Rock in Mining ActvitiesDocumento557 pagineManagement of Tailings and Waste Rock in Mining ActvitiesPaula TrindadeNessuna valutazione finora
- Determination of Optimal Cut-Off Grade Policy (Referencia)Documento8 pagineDetermination of Optimal Cut-Off Grade Policy (Referencia)11804Nessuna valutazione finora
- 6 2011 JORC ReviewDocumento23 pagine6 2011 JORC ReviewKresno AdjiNessuna valutazione finora
- Maputo Corridor Mar2007Documento84 pagineMaputo Corridor Mar2007이승원Nessuna valutazione finora
- Feasibility StudiesDocumento4 pagineFeasibility StudiesyudakurniaawanNessuna valutazione finora
- Aspects of Evaluating Mining ProjectsDocumento12 pagineAspects of Evaluating Mining ProjectsIury VazNessuna valutazione finora
- Myb1-2006-Nickel by Peter H. KuckDocumento27 pagineMyb1-2006-Nickel by Peter H. KuckAhmad AshariNessuna valutazione finora
- Orion South Diamond ProjectDocumento404 pagineOrion South Diamond ProjectFYC1989100% (1)
- GK Executive Summary 1.2Documento7 pagineGK Executive Summary 1.2kingdomtruck1Nessuna valutazione finora
- Application of Robotics in Mining IndustryDocumento5 pagineApplication of Robotics in Mining IndustryalfavectorNessuna valutazione finora
- Issue110 Evolution MiningTrucksDocumento4 pagineIssue110 Evolution MiningTrucksluisparedesNessuna valutazione finora
- Holtec Consultancy - Limestone Mining Cost ReductionDocumento6 pagineHoltec Consultancy - Limestone Mining Cost ReductionTvs SarmaNessuna valutazione finora
- 24th International Mining CongressDocumento1.551 pagine24th International Mining CongressFilos Safio100% (1)
- EE401-3!2015 EmbeddedSystemsDocumento90 pagineEE401-3!2015 EmbeddedSystemsPenny NguyenNessuna valutazione finora
- MegatronixDocumento21 pagineMegatronix6040 Kavi Shekhar 20 MSECNessuna valutazione finora
- TMEIC Directo-Matic LCI 2011 Low-Res 1312294547Documento8 pagineTMEIC Directo-Matic LCI 2011 Low-Res 1312294547Parameswararao BillaNessuna valutazione finora
- Navigator Design Report 2011 Intelligent Ground Vehicle CompetitionDocumento15 pagineNavigator Design Report 2011 Intelligent Ground Vehicle CompetitionKenDaniswaraNessuna valutazione finora
- Tutorial: MSBA7003 Quantitative Analysis MethodsDocumento29 pagineTutorial: MSBA7003 Quantitative Analysis MethodsAmanda WangNessuna valutazione finora
- 01 IntroductionDocumento15 pagine01 IntroductionAli FarhatNessuna valutazione finora
- Social Science PedagogyDocumento4 pagineSocial Science PedagogyrajendraNessuna valutazione finora
- The Logic of Repetition: A Guide To Trading, Thinking, and The Cycles of LifeDocumento10 pagineThe Logic of Repetition: A Guide To Trading, Thinking, and The Cycles of LifeRaghvendra kNessuna valutazione finora
- History Homework Help Ks3Documento8 pagineHistory Homework Help Ks3afetnjvog100% (1)
- The Invisible SunDocumento7 pagineThe Invisible SunJay Alfred100% (1)
- Gastone Petrini: Strutture e Costruzioni Autarchiche Di Legno in Italia e Colonie Caratteri e CriterDocumento9 pagineGastone Petrini: Strutture e Costruzioni Autarchiche Di Legno in Italia e Colonie Caratteri e CriterPier Pasquale TrausiNessuna valutazione finora
- Aerated Concrete Production Using Various Raw MaterialsDocumento5 pagineAerated Concrete Production Using Various Raw Materialskinley dorjee100% (1)
- Excel Crash Course PDFDocumento2 pagineExcel Crash Course PDFmanoj_yadav735Nessuna valutazione finora
- Electric PotentialDocumento26 pagineElectric PotentialGlitchNessuna valutazione finora
- Email ID: Contact No: +971562398104, +917358302902: Name: R.VishnushankarDocumento6 pagineEmail ID: Contact No: +971562398104, +917358302902: Name: R.VishnushankarJêmš NavikNessuna valutazione finora
- Chapter 2 Axial and Torsional ElementsDocumento57 pagineChapter 2 Axial and Torsional ElementsAhmad FaidhiNessuna valutazione finora
- 1974 - Roncaglia - The Reduction of Complex LabourDocumento12 pagine1974 - Roncaglia - The Reduction of Complex LabourRichardNessuna valutazione finora
- Overview of MEMDocumento5 pagineOverview of MEMTudor Costin100% (1)
- Research Paper On N Queen ProblemDocumento7 pagineResearch Paper On N Queen Problemxvrdskrif100% (1)
- Reading Proficiency Level of Students: Basis For Reading Intervention ProgramDocumento13 pagineReading Proficiency Level of Students: Basis For Reading Intervention ProgramSONY JOY QUINTONessuna valutazione finora
- APPSC GROUP 4 RESULTS 2012 - Khammam District Group 4 Merit ListDocumento824 pagineAPPSC GROUP 4 RESULTS 2012 - Khammam District Group 4 Merit ListReviewKeys.comNessuna valutazione finora
- 8 Lesson 13 Viking FranceDocumento2 pagine8 Lesson 13 Viking Franceapi-332379661Nessuna valutazione finora
- GARCH (1,1) Models: Ruprecht-Karls-Universit at HeidelbergDocumento42 pagineGARCH (1,1) Models: Ruprecht-Karls-Universit at HeidelbergRanjan KumarNessuna valutazione finora
- Review Rachna WasteDocumento9 pagineReview Rachna WasteSanjeet DuhanNessuna valutazione finora
- Course Outline Principles of MarketingDocumento3 pagineCourse Outline Principles of MarketingKhate Tria De LeonNessuna valutazione finora
- DJF 41032 Manufacturing Workshop Practice 3 Plastic Lab: Mini Project (Transfer Moulding)Documento7 pagineDJF 41032 Manufacturing Workshop Practice 3 Plastic Lab: Mini Project (Transfer Moulding)Lokhman HakimNessuna valutazione finora
- Tree Based Machine Learning Algorithms Decision Trees Random Forests and Boosting B0756FGJCPDocumento109 pagineTree Based Machine Learning Algorithms Decision Trees Random Forests and Boosting B0756FGJCPJulio Davalos Vasquez100% (1)
- Gr. 10 Persuasive EssayDocumento22 pagineGr. 10 Persuasive EssayZephania JandayanNessuna valutazione finora
- Certified Vendors As of 9 24 21Documento19 pagineCertified Vendors As of 9 24 21Micheal StormNessuna valutazione finora
- A Guide To Sample Size For Animal-Based Studies (VetBooks - Ir)Documento292 pagineA Guide To Sample Size For Animal-Based Studies (VetBooks - Ir)Jonathan MannNessuna valutazione finora
- Agenda - Meeting SLC (LT) - 27.06.2014 PDFDocumento27 pagineAgenda - Meeting SLC (LT) - 27.06.2014 PDFharshal1223Nessuna valutazione finora
- OOPS KnowledgeDocumento47 pagineOOPS KnowledgeLakshmanNessuna valutazione finora
- EE360 - Magnetic CircuitsDocumento48 pagineEE360 - Magnetic Circuitsبدون اسمNessuna valutazione finora
- Marketing Plan Outline-Fall 23Documento6 pagineMarketing Plan Outline-Fall 23arbelsb3Nessuna valutazione finora