Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Cessna 340A - Cessna 340A Reference Manual - Rev 0 PDFDocumento367 pagineCessna 340A - Cessna 340A Reference Manual - Rev 0 PDFLucas Knight100% (6)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Airbus 320 Series - SmartCockpit Questionnaire by BragaDocumento64 pagineAirbus 320 Series - SmartCockpit Questionnaire by BragaMarcos Braga93% (15)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- B200 ChecklistDocumento2 pagineB200 ChecklistFelipe Carvalho100% (3)
- Flight Stability and Automatic Control Second Edition Robert C. NelsonDocumento230 pagineFlight Stability and Automatic Control Second Edition Robert C. NelsonSubin Park93% (14)
- STCSR032800NY RFMS Garmin G1000 ConfigurationDocumento254 pagineSTCSR032800NY RFMS Garmin G1000 ConfigurationGivago Tondo Horst100% (1)
- Acoustic Models: Numerical Solution TechniquesDocumento8 pagineAcoustic Models: Numerical Solution TechniquesgarystevensozNessuna valutazione finora
- The Missing Mechanical Circuit ElementDocumento17 pagineThe Missing Mechanical Circuit ElementgarystevensozNessuna valutazione finora
- The Rise and Fall of The Rotor Blade Strain GaugeDocumento12 pagineThe Rise and Fall of The Rotor Blade Strain GaugegarystevensozNessuna valutazione finora
- Nafems Benchmark AerospaceDocumento57 pagineNafems Benchmark Aerospacegarystevensoz0% (1)
- A Higher Order Panel Method For Linearised Supersonic FlowDocumento257 pagineA Higher Order Panel Method For Linearised Supersonic FlowgarystevensozNessuna valutazione finora
- Damping ModelsDocumento23 pagineDamping ModelsgarystevensozNessuna valutazione finora
- Naca Report 496 TheodorsenDocumento21 pagineNaca Report 496 TheodorsengarystevensozNessuna valutazione finora
- Eijkhout - Intro To HPCDocumento482 pagineEijkhout - Intro To HPCgarystevensozNessuna valutazione finora
- Development and Implementation of A Flight Test Program For A Geometrically Scaled Joined Wing Sensorcraft Remotely Piloted VehicleDocumento258 pagineDevelopment and Implementation of A Flight Test Program For A Geometrically Scaled Joined Wing Sensorcraft Remotely Piloted VehiclegarystevensozNessuna valutazione finora
- System Coupling Users GuideDocumento144 pagineSystem Coupling Users GuidegarystevensozNessuna valutazione finora
- Solving Laplace EquationDocumento42 pagineSolving Laplace Equationgarystevensoz100% (1)
- Analysis of Axial Flow Fan Using AnsysDocumento9 pagineAnalysis of Axial Flow Fan Using AnsysgarystevensozNessuna valutazione finora
- Karman Treffitz TransformationDocumento24 pagineKarman Treffitz Transformationgarystevensoz100% (1)
- Spacecraft Loads AnalysisDocumento126 pagineSpacecraft Loads AnalysisSimone RagionieriNessuna valutazione finora
- Aerospace America Dec 2012Documento116 pagineAerospace America Dec 2012garystevensozNessuna valutazione finora
- 777 Empennage Certification ApproachDocumento18 pagine777 Empennage Certification Approachgarystevensoz100% (2)
- Boundary Layer NotesDocumento17 pagineBoundary Layer NotesgarystevensozNessuna valutazione finora
- Confomral Mapping - WakeDocumento9 pagineConfomral Mapping - WakegarystevensozNessuna valutazione finora
- MMMX PDFDocumento23 pagineMMMX PDFRobert ZrmNessuna valutazione finora
- Flight Dynamics-IDocumento15 pagineFlight Dynamics-IKelvin Sudani100% (1)
- Aerospace or Mechanical Design EngineerDocumento2 pagineAerospace or Mechanical Design Engineerapi-76878831Nessuna valutazione finora
- T-38 Park Jet Construction GuideDocumento16 pagineT-38 Park Jet Construction Guidemam73Nessuna valutazione finora
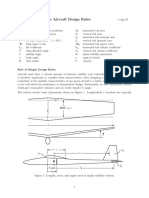
- Lab 8 Notes - Basic Aircraft Design Rules: H V H V H H VDocumento8 pagineLab 8 Notes - Basic Aircraft Design Rules: H V H V H H VRia Jiot100% (1)
- Building An Egg Crate Rubber Powered Model: Designed by Ross JahnkeDocumento3 pagineBuilding An Egg Crate Rubber Powered Model: Designed by Ross JahnkemikebutsNessuna valutazione finora
- Vol.14 Operational ProceduresDocumento163 pagineVol.14 Operational ProceduresANAKI100% (1)
- NACA 0012 Airfoil Analysis PDFDocumento11 pagineNACA 0012 Airfoil Analysis PDFMiliani AhmedNessuna valutazione finora
- 206 - 205 - Ec1ad47a2a29 - Trike Manual PDFDocumento72 pagine206 - 205 - Ec1ad47a2a29 - Trike Manual PDFDavid RomeroNessuna valutazione finora
- A Presentation On: ResistojetDocumento14 pagineA Presentation On: ResistojetudhayNessuna valutazione finora
- Vintage Airplane - Sep 1996Documento36 pagineVintage Airplane - Sep 1996Aviation/Space History LibraryNessuna valutazione finora
- Eurofighter ManualDocumento43 pagineEurofighter ManualMaximilianNessuna valutazione finora
- Strip Theory (2 D Potential Theory)Documento8 pagineStrip Theory (2 D Potential Theory)Bilal MalikNessuna valutazione finora
- Aerodrome Directory For Light Aircraft (ALA) : Aip Indonesia (Vol. Iv) West PapuaDocumento4 pagineAerodrome Directory For Light Aircraft (ALA) : Aip Indonesia (Vol. Iv) West PapuaandyNessuna valutazione finora
- RPT Internal Scheme ReportDocumento11 pagineRPT Internal Scheme ReportAnup ShindeNessuna valutazione finora
- Forward Flight Lecture2Documento6 pagineForward Flight Lecture2durak89Nessuna valutazione finora
- Service Letter: Commercial Aviation ServicesDocumento16 pagineService Letter: Commercial Aviation ServicesigorlazniukNessuna valutazione finora
- Sam Modellers Datafile 09 The Messerschmitt BF 109 Part 1 Prototype To e VariantsDocumento180 pagineSam Modellers Datafile 09 The Messerschmitt BF 109 Part 1 Prototype To e Variantscarol100% (1)
- In Flight Fuel Management and Declaring MINIMUM MAYDAY FUEL-1.0Documento21 pagineIn Flight Fuel Management and Declaring MINIMUM MAYDAY FUEL-1.0dahiya1988Nessuna valutazione finora
- Guide To Engineering Admissions in India - 2012 EditionDocumento321 pagineGuide To Engineering Admissions in India - 2012 Editionaditya_kumar_me0% (1)
- Trouvaille Act 3Documento37 pagineTrouvaille Act 3Rey ParsNessuna valutazione finora
- Model Rocketry ProjectsDocumento14 pagineModel Rocketry ProjectsAviation/Space History LibraryNessuna valutazione finora
- Gemini VII Technical DebriefingDocumento220 pagineGemini VII Technical DebriefingBob AndrepontNessuna valutazione finora
- ZuckDocumento23 pagineZuckBubaNessuna valutazione finora
- Flight Test GuidelinesDocumento156 pagineFlight Test Guidelineslth100% (3)