Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Boolean Theorems and Boolean AlgebraDocumento2 pagineBoolean Theorems and Boolean AlgebraAnonymous s8OrImv8Nessuna valutazione finora
- $RHBT115 PDFDocumento8 pagine$RHBT115 PDFAnonymous s8OrImv8Nessuna valutazione finora
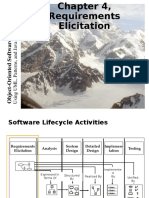
- Requirements EelicitationDocumento32 pagineRequirements EelicitationAnonymous s8OrImv8Nessuna valutazione finora
- Unit IIDocumento25 pagineUnit IIAnonymous s8OrImv8Nessuna valutazione finora
- Unit IIDocumento25 pagineUnit IIAnonymous s8OrImv8Nessuna valutazione finora
- Chemistry Investigatory Project: Setting of CementDocumento17 pagineChemistry Investigatory Project: Setting of CementAnonymous s8OrImv8Nessuna valutazione finora
- Oop Inheritance 422 K8u3g1Documento2 pagineOop Inheritance 422 K8u3g1Anonymous s8OrImv8Nessuna valutazione finora
- PDS 2 Unit 3 NotesDocumento22 paginePDS 2 Unit 3 NotesAnonymous s8OrImv8Nessuna valutazione finora
- Topics: Minimum Spanning TreesDocumento33 pagineTopics: Minimum Spanning TreesAnonymous s8OrImv8Nessuna valutazione finora
- Personal Best Position Particle Swarm Optimization: Narinder SINGH, S.B. SinghDocumento8 paginePersonal Best Position Particle Swarm Optimization: Narinder SINGH, S.B. SinghAnonymous s8OrImv8Nessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- BehatDocumento85 pagineBehatsawweNessuna valutazione finora
- 11 New Tips For Boosting Windows XP PerformanceDocumento5 pagine11 New Tips For Boosting Windows XP PerformanceBill PetrieNessuna valutazione finora
- DSA Short NotesDocumento4 pagineDSA Short NotesJitendra ChoudharyNessuna valutazione finora
- Installation InstructionsDocumento3 pagineInstallation InstructionsThiago100% (1)
- Prashant (1) .Shrivastava Resume (System Admin)Documento2 paginePrashant (1) .Shrivastava Resume (System Admin)Sapna MathurNessuna valutazione finora
- Interview Questions Big Data AnalyticsDocumento27 pagineInterview Questions Big Data AnalyticsSenthil KumarNessuna valutazione finora
- Data Statistics Number of Records Passed 961Documento18 pagineData Statistics Number of Records Passed 961godiyal4uNessuna valutazione finora
- Shortcut Set IndesignDocumento47 pagineShortcut Set IndesignIonel PopescuNessuna valutazione finora
- Winzip15 Matrix enDocumento2 pagineWinzip15 Matrix enRonan MendonçaNessuna valutazione finora
- Lesson Plan Grade 11 & 12 (Day 2)Documento5 pagineLesson Plan Grade 11 & 12 (Day 2)HanessyNessuna valutazione finora
- IoT Based Water Level Meter For Alerting Population About FloodsDocumento3 pagineIoT Based Water Level Meter For Alerting Population About FloodsEditor IJTSRDNessuna valutazione finora
- VNX SPS Reemplazo de Unidad-Cambio Alimentación ElectricaDocumento15 pagineVNX SPS Reemplazo de Unidad-Cambio Alimentación Electricadvecchio2014Nessuna valutazione finora
- SPL Series Scpi Programming Guide SB - GBDocumento16 pagineSPL Series Scpi Programming Guide SB - GBMihai CherechesNessuna valutazione finora
- Zünd Cut Center: Digital Cutting WorkflowDocumento6 pagineZünd Cut Center: Digital Cutting WorkflowMirjana EricNessuna valutazione finora
- Principles of Data Management and Mining: CS 504 Spring 2020Documento28 paginePrinciples of Data Management and Mining: CS 504 Spring 2020bijaysubediNessuna valutazione finora
- Assembly LanguageDocumento17 pagineAssembly LanguageKenneth CasuelaNessuna valutazione finora
- Carlson Software Retail Price List 03-24-15Documento29 pagineCarlson Software Retail Price List 03-24-15bechki5Nessuna valutazione finora
- A Tutorial On Testing Visualizing and Probing An Interaction Involving A Multicategorical Variable in Linear Regression AnalysisDocumento31 pagineA Tutorial On Testing Visualizing and Probing An Interaction Involving A Multicategorical Variable in Linear Regression AnalysisBlayel FelihtNessuna valutazione finora
- Simple Vs Compound InterestDocumento4 pagineSimple Vs Compound InterestSreedhar RaoNessuna valutazione finora
- Install Mediatek Mt65xx Usb Vcom Drivers For Windows AllDocumento79 pagineInstall Mediatek Mt65xx Usb Vcom Drivers For Windows Alladriano castroNessuna valutazione finora
- FSR500 ManualDocumento144 pagineFSR500 Manualmiroy14964Nessuna valutazione finora
- DBMS Interview QuestionsDocumento4 pagineDBMS Interview QuestionsVamshi Reddy AmanagantiNessuna valutazione finora
- DSW 391Documento111 pagineDSW 391Junior GodoiNessuna valutazione finora
- DMS2 GE Instruction BookDocumento227 pagineDMS2 GE Instruction BookJoshnewfound100% (2)
- Conceptual Structures in Modern Information Retrieval: Claudio CarpinetoDocumento28 pagineConceptual Structures in Modern Information Retrieval: Claudio Carpinetoapi-20013624Nessuna valutazione finora
- Ism Prerecorded Training MaterialDocumento35 pagineIsm Prerecorded Training MaterialHendra SetiawanNessuna valutazione finora
- Manual Sizer ComponentoneDocumento191 pagineManual Sizer ComponentoneGilbertoJulioMuñozNessuna valutazione finora
- Actix Traning - Actix BasicsDocumento18 pagineActix Traning - Actix Basicsudaff4ikNessuna valutazione finora
- File - SK.312 MENLHK SETJEN PSKL.1 4 2019 PDFDocumento3 pagineFile - SK.312 MENLHK SETJEN PSKL.1 4 2019 PDFCDK MeraukeNessuna valutazione finora
- White Paper of The Facebook Metaverse Token AboutDocumento6 pagineWhite Paper of The Facebook Metaverse Token AboutProgram kpu jambiNessuna valutazione finora