Potrebbero piacerti anche
- Avalia EsDocumento50 pagineAvalia EsValéria GianiniNessuna valutazione finora
- Automação Residencial Na Construção Civil PDFDocumento93 pagineAutomação Residencial Na Construção Civil PDFBreno WNessuna valutazione finora
- Compatibilização de projetos arquitetônico e hidrossanitário utilizando BIMDocumento28 pagineCompatibilização de projetos arquitetônico e hidrossanitário utilizando BIMJakson CostaNessuna valutazione finora
- Logística de Canteiro de Obras para Aumentar ProdutividadeDocumento61 pagineLogística de Canteiro de Obras para Aumentar ProdutividadePaulinoNessuna valutazione finora
- Estudo comparativo entre projetos tradicionais e BIM no MCMVDocumento42 pagineEstudo comparativo entre projetos tradicionais e BIM no MCMVedumineNessuna valutazione finora
- 2020 JoaoVitorSiqueiraResende TCCDocumento69 pagine2020 JoaoVitorSiqueiraResende TCCMagas OlmNessuna valutazione finora
- Proj Poli 10035354Documento56 pagineProj Poli 10035354Armando Dos AnjosNessuna valutazione finora
- Industrializacao Construcao Civil Pamela Tavares FURB FINALDocumento54 pagineIndustrializacao Construcao Civil Pamela Tavares FURB FINALDavid E LilianNessuna valutazione finora
- Plano de Trabalho - Renato RamosDocumento36 paginePlano de Trabalho - Renato RamosDaniel CostaNessuna valutazione finora
- O uso do BIM na gestão da construção civilDocumento41 pagineO uso do BIM na gestão da construção civilRobério Carvalho JrNessuna valutazione finora
- Tecnologia Viabilidade Sistema Construtivo Parede de Concreto Moldada in Loco - Tiago VentinDocumento70 pagineTecnologia Viabilidade Sistema Construtivo Parede de Concreto Moldada in Loco - Tiago Ventinvinicius alberto silvaNessuna valutazione finora
- Dimensionamento Análise ComparativaDocumento65 pagineDimensionamento Análise ComparativaVictor Hugo LarentisNessuna valutazione finora
- safcassasqwDocumento64 paginesafcassasqwalan.forgames01Nessuna valutazione finora
- A Criação de Projetos em Bim e o Beneficio Dos Softwares No Planejamento e Gerenciamento de ObrasDocumento112 pagineA Criação de Projetos em Bim e o Beneficio Dos Softwares No Planejamento e Gerenciamento de ObrasEronilson PenhaNessuna valutazione finora
- Monografica Gabriel Sanches - Viabilidade DrywallDocumento41 pagineMonografica Gabriel Sanches - Viabilidade DrywallSávio CarvalhoNessuna valutazione finora
- Apostila Vistoria de Vizinhança PDFDocumento48 pagineApostila Vistoria de Vizinhança PDFevilakaroline100% (1)
- TCC - 2014 - Augusto César de Magalhães JuniorDocumento76 pagineTCC - 2014 - Augusto César de Magalhães JuniorAriadinni FernandaNessuna valutazione finora
- TCC 2 Rev 03Documento48 pagineTCC 2 Rev 03Ana Paula OjeaNessuna valutazione finora
- 2016 LaisDeAndradeFreitas TCCDocumento77 pagine2016 LaisDeAndradeFreitas TCCFelipeNessuna valutazione finora
- Monografia Controle de Custos de ObrasDocumento46 pagineMonografia Controle de Custos de ObrasRENIER DE OLIVEIRA MORENONessuna valutazione finora
- Atividade Arquitetura de Interiores - Sem 2023.2 Unidade 1Documento2 pagineAtividade Arquitetura de Interiores - Sem 2023.2 Unidade 1Jordana SilvaNessuna valutazione finora
- Dissertação de Mestrado #720: Arquitetura de Hardware E Software para Supervisão E Controle de Um Carro AutônomoDocumento101 pagineDissertação de Mestrado #720: Arquitetura de Hardware E Software para Supervisão E Controle de Um Carro AutônomoCarol BorgesNessuna valutazione finora
- Computação Gráfica Aplicada A Eng. CivilDocumento79 pagineComputação Gráfica Aplicada A Eng. CivilDarlan MantelliNessuna valutazione finora
- Construção civil: Características e execução de esquadriasDocumento69 pagineConstrução civil: Características e execução de esquadriasHebert MaycoNessuna valutazione finora
- Patologias em alvenaria estrutural: causas e diagnósticoDocumento76 paginePatologias em alvenaria estrutural: causas e diagnósticoGustavoLuanNessuna valutazione finora
- 2013 TCC JscnetoDocumento67 pagine2013 TCC JscnetoFabio BatistaNessuna valutazione finora
- Apostila Autocad Patriciafaria 2016Documento129 pagineApostila Autocad Patriciafaria 2016cjaraujoNessuna valutazione finora
- Avaliação Uso TecnologiaDocumento96 pagineAvaliação Uso Tecnologiaasmorais579Nessuna valutazione finora
- TCC 2 Final - Roberto MaganiniDocumento77 pagineTCC 2 Final - Roberto Maganiniroberto maganiniNessuna valutazione finora
- Responsabilidade Civil e Penal Nos Erros Cometidos Por Engenheiros CivisDocumento52 pagineResponsabilidade Civil e Penal Nos Erros Cometidos Por Engenheiros CivisMarcelo Dos Santos BentoNessuna valutazione finora
- Edifícios "Inteligentes" A Domótica Aplicada À Realidade BrasileiraDocumento57 pagineEdifícios "Inteligentes" A Domótica Aplicada À Realidade BrasileiraRafael BarbieroNessuna valutazione finora
- PcdmisDocumento127 paginePcdmisLeonardo TeixeiraNessuna valutazione finora
- TCC FinalDocumento146 pagineTCC Finalandersonline1854Nessuna valutazione finora
- Engenharia Civil: Concepção, Teoria E PráticaDa EverandEngenharia Civil: Concepção, Teoria E PráticaNessuna valutazione finora
- 6 TCC RAFAELA - Concurso CREADocumento69 pagine6 TCC RAFAELA - Concurso CREAFagner Paulo SilvaNessuna valutazione finora
- Concepção Edifício Business GardenDocumento37 pagineConcepção Edifício Business GardenWudson NunesNessuna valutazione finora
- Aplicação Da Engenharia de Custos Na Composição de Orçamentos de Construção CivilDocumento41 pagineAplicação Da Engenharia de Custos Na Composição de Orçamentos de Construção CivilLuiz Otavio MachadoNessuna valutazione finora
- Zander ES EdifSustDocumento72 pagineZander ES EdifSustCarlos Frederico Rieck ZanderNessuna valutazione finora
- A Compatibilização de Projetos Aplicada A Uma Obra PúblicaDocumento90 pagineA Compatibilização de Projetos Aplicada A Uma Obra PúblicaaciprianoNessuna valutazione finora
- BIM Na Fiscalização de Projetos - CleitonRochadeMatosDocumento155 pagineBIM Na Fiscalização de Projetos - CleitonRochadeMatosSávio CarvalhoNessuna valutazione finora
- Análise de fundação residencial em radier pelo método dos elementos finitosDocumento133 pagineAnálise de fundação residencial em radier pelo método dos elementos finitosMarcos PauloNessuna valutazione finora
- Edificações NR 18Documento57 pagineEdificações NR 18HumbertoSchneiderNessuna valutazione finora
- TCC Jean Ricardo SacentiDocumento122 pagineTCC Jean Ricardo SacentiMagno RegisNessuna valutazione finora
- TCC - Trabalho Prático de Gerenciamento de Obras - Rev08Documento132 pagineTCC - Trabalho Prático de Gerenciamento de Obras - Rev08Ana Paula OjeaNessuna valutazione finora
- 27 - Orientacoes para o Desenvolvimento de Projetos Abordando o BimDocumento99 pagine27 - Orientacoes para o Desenvolvimento de Projetos Abordando o BimFagner Paulo SilvaNessuna valutazione finora
- Vistoria cautelar para produção antecipada de provas em obra civilDocumento108 pagineVistoria cautelar para produção antecipada de provas em obra civilJuliana HannaNessuna valutazione finora
- ANÁLISE DE MODELOS DE GERAÇÃO DE VIAGENS A POLOS GERADORES DE VIAGENS (PGVS)Documento62 pagineANÁLISE DE MODELOS DE GERAÇÃO DE VIAGENS A POLOS GERADORES DE VIAGENS (PGVS)Ivo Vieira Lamas100% (1)
- Domótica no Brasil: automação predial e residencialDocumento46 pagineDomótica no Brasil: automação predial e residencialCláudio MagalhãesNessuna valutazione finora
- Planejamento 4D com BIMDocumento117 paginePlanejamento 4D com BIMaderbalwallissonNessuna valutazione finora
- Exploração Das Possibilidades Da Impressão 3dDocumento92 pagineExploração Das Possibilidades Da Impressão 3dTarcísio MarquesNessuna valutazione finora
- TCC-IMTCDocumento42 pagineTCC-IMTCpkneipNessuna valutazione finora
- Light PenDocumento262 pagineLight PenRaphael MotaNessuna valutazione finora
- BIM para compatibilização de projetosDocumento73 pagineBIM para compatibilização de projetosDaiane BrisottoNessuna valutazione finora
- VIPTEC - Projeto Hidrossanitário PDFDocumento89 pagineVIPTEC - Projeto Hidrossanitário PDFPaloma Dondo Tonello PedroNessuna valutazione finora
- TCC Análise Segmento Rodoviário Metodologia BIMDocumento54 pagineTCC Análise Segmento Rodoviário Metodologia BIMEmerson GranzottiNessuna valutazione finora
- Tecnologias habilitadoras da Indústria 4.0 aplicadas para melhoria da segurança do trabalho na construção civilDa EverandTecnologias habilitadoras da Indústria 4.0 aplicadas para melhoria da segurança do trabalho na construção civilNessuna valutazione finora
- Produção Do Espaço Urbano Seguro Em Curitiba:Da EverandProdução Do Espaço Urbano Seguro Em Curitiba:Nessuna valutazione finora
- Mapeamento De Áreas De RiscoDa EverandMapeamento De Áreas De RiscoNessuna valutazione finora
- A Utilização De Sistemas Compartilhados Nos Aeroportos BrasileirosDa EverandA Utilização De Sistemas Compartilhados Nos Aeroportos BrasileirosNessuna valutazione finora
- Ao Gerenciamento de Canteiro de ObrasDocumento20 pagineAo Gerenciamento de Canteiro de ObrasFilipe BoitoNessuna valutazione finora
- O que é um Canteiro de ObrasDocumento67 pagineO que é um Canteiro de ObrasKassia LivioNessuna valutazione finora
- QUADRO I - em UsoDocumento3 pagineQUADRO I - em UsoKleber Marcelo CarvalhoNessuna valutazione finora
- Recebimento de MateriaisDocumento108 pagineRecebimento de MateriaisKleber Marcelo CarvalhoNessuna valutazione finora
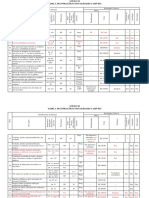
- Anexo Xi - Tabela de Infrações Código de ObrasDocumento5 pagineAnexo Xi - Tabela de Infrações Código de ObrasKleber Marcelo CarvalhoNessuna valutazione finora
- Gestão CanteirosDocumento9 pagineGestão CanteirosKleber Marcelo CarvalhoNessuna valutazione finora
- QUADRO I - em UsoDocumento3 pagineQUADRO I - em UsoKleber Marcelo CarvalhoNessuna valutazione finora
- 9.1 - Plano+de+Recursos+HumanosDocumento3 pagine9.1 - Plano+de+Recursos+HumanosKleber Marcelo CarvalhoNessuna valutazione finora
- 5.4 - Dicionario+da+EAPDocumento2 pagine5.4 - Dicionario+da+EAPKleber Marcelo CarvalhoNessuna valutazione finora
- Quadro II UsosDocumento7 pagineQuadro II UsosKleber Marcelo CarvalhoNessuna valutazione finora
- Manual de Licenciamento AmbientalDocumento56 pagineManual de Licenciamento AmbientalprettogianNessuna valutazione finora
- Aula 01 - Introdução À Refrigeração - Refrigeração e Ar CondicionadoDocumento11 pagineAula 01 - Introdução À Refrigeração - Refrigeração e Ar CondicionadoEmerson CarvalhoNessuna valutazione finora
- Gestão CanteirosDocumento9 pagineGestão CanteirosKleber Marcelo CarvalhoNessuna valutazione finora
- A Utilização de "Curvas de Agregação de Recursos" Como Ferramenta de Integração Dos Diferentes Setores de Uma Empresa de Construção Civil Na Gestão de CustosDocumento8 pagineA Utilização de "Curvas de Agregação de Recursos" Como Ferramenta de Integração Dos Diferentes Setores de Uma Empresa de Construção Civil Na Gestão de Custosmirto79Nessuna valutazione finora
- Escoramento AbaixamentoDocumento24 pagineEscoramento AbaixamentoKleber Marcelo CarvalhoNessuna valutazione finora
- EscavacoesecontencoesDocumento66 pagineEscavacoesecontencoesAdilson LeãoNessuna valutazione finora
- ContençõesDocumento22 pagineContençõesJoão Paulo de OliveiraNessuna valutazione finora
- NR 18 EscavaçõesDocumento53 pagineNR 18 EscavaçõesKleber Marcelo Carvalho100% (1)
- Controle de EstoqueDocumento3 pagineControle de EstoqueKleber Marcelo CarvalhoNessuna valutazione finora
- Telhado Eng Civil6 Cobertura RevDocumento34 pagineTelhado Eng Civil6 Cobertura RevCaio B. LarrubiaNessuna valutazione finora
- Cartilha Acessibilidade Edificacoes CreaDocumento34 pagineCartilha Acessibilidade Edificacoes Crearacnatao797Nessuna valutazione finora
- 5 Principios Lean ConstrutionDocumento30 pagine5 Principios Lean ConstrutionKleber Marcelo CarvalhoNessuna valutazione finora
- Esquadrias Parte 1 X PDFDocumento57 pagineEsquadrias Parte 1 X PDFKleber Marcelo CarvalhoNessuna valutazione finora
- Níveis de NBR 10636Documento12 pagineNíveis de NBR 10636Kleber Marcelo CarvalhoNessuna valutazione finora
- Informática - Excel Apostila Excel AvancDocumento14 pagineInformática - Excel Apostila Excel AvancExcelly100% (6)
- Atividade de trabalho de motoristas de ambulância sob o ponto de vista ergológicoDocumento10 pagineAtividade de trabalho de motoristas de ambulância sob o ponto de vista ergológicoKleber Marcelo CarvalhoNessuna valutazione finora
- Palestra CAU RJ Abril 2014Documento16 paginePalestra CAU RJ Abril 2014Kleber Marcelo CarvalhoNessuna valutazione finora
- Há Fatores Não Econômicos Na Formacao Do Preco de ImóveisDocumento26 pagineHá Fatores Não Econômicos Na Formacao Do Preco de ImóveisKleber Marcelo CarvalhoNessuna valutazione finora
- 6303437Documento170 pagine6303437Jec MoraisNessuna valutazione finora
- Programa de Qualidade 5S - Reginaldo LapaDocumento15 paginePrograma de Qualidade 5S - Reginaldo LapazurigahNessuna valutazione finora
- PDocumento4 paginePtsunaNessuna valutazione finora
- A existência e suas patologias no mundo hipermodernoDocumento15 pagineA existência e suas patologias no mundo hipermodernomayara_mka7945Nessuna valutazione finora
- Ennajup Caderno 2019Documento213 pagineEnnajup Caderno 2019VictóriaNessuna valutazione finora
- Pai Contra Mãe - Machado de Assis.Documento6 paginePai Contra Mãe - Machado de Assis.Hugo FreitasNessuna valutazione finora
- Mh8 Correcao Ficha2 CaddiarioDocumento2 pagineMh8 Correcao Ficha2 CaddiarioAna RibeiroNessuna valutazione finora
- Diversidade Na BiosferaDocumento73 pagineDiversidade Na BiosferaDino RubioNessuna valutazione finora
- Orçamento E-Commerce, Formato 1Documento3 pagineOrçamento E-Commerce, Formato 1João Vitor da SilvaNessuna valutazione finora
- A SANTA MISSA para CriancasDocumento96 pagineA SANTA MISSA para CriancasPGNessuna valutazione finora
- Mesa cirúrgica motorizada multifuncionalDocumento156 pagineMesa cirúrgica motorizada multifuncionalTatianaNessuna valutazione finora
- CFRM Producao 2019Documento8 pagineCFRM Producao 2019Clara MartinsNessuna valutazione finora
- 00 07 08 10 14 - Ensino Fundamental 2 - p0914Documento12 pagine00 07 08 10 14 - Ensino Fundamental 2 - p0914andre galdinoNessuna valutazione finora
- Confissões de Uma Mente PerigosaDocumento6 pagineConfissões de Uma Mente PerigosaVictorNessuna valutazione finora
- FIchamento Do 1º Capitulo Do Conceitos e TemasDocumento8 pagineFIchamento Do 1º Capitulo Do Conceitos e TemasIsa MaiaNessuna valutazione finora
- Tabela de Garantias-Nbr15575Documento3 pagineTabela de Garantias-Nbr15575Lili OliveiraNessuna valutazione finora
- Exercícios Revisão PO1 PORTUGUES MONICA FERNANBACHDocumento2 pagineExercícios Revisão PO1 PORTUGUES MONICA FERNANBACHLuiz Henrique Silveira MoraesNessuna valutazione finora
- T. MathiesenDocumento32 pagineT. MathiesenLiviaMecdoNessuna valutazione finora
- Personagens One Pach ManDocumento61 paginePersonagens One Pach ManEduardo RodriguesNessuna valutazione finora
- Gêneros Textuais e Ensino-AprendizagemDocumento248 pagineGêneros Textuais e Ensino-AprendizagemMarcos Philipe100% (2)
- 1-Indice Dos LivrosDocumento42 pagine1-Indice Dos LivrossaraoliviaNessuna valutazione finora
- Unit Unificado Cade 1 2022 FinalDocumento27 pagineUnit Unificado Cade 1 2022 FinalIsabella MachadoNessuna valutazione finora
- PMSB Palmas Volume 04 Residuos Solidos Versao FinalDocumento440 paginePMSB Palmas Volume 04 Residuos Solidos Versao FinalJudson Araujo SilvaNessuna valutazione finora
- Sonja BuckelDocumento24 pagineSonja BuckelRafael CasaisNessuna valutazione finora
- A Teologia do Coaching: Uma análise crítica dessa nova tendênciaDocumento11 pagineA Teologia do Coaching: Uma análise crítica dessa nova tendênciaa2ndersonNessuna valutazione finora
- A Saga Romanesca em Silvino Jacques de Brígido IbanhesDocumento122 pagineA Saga Romanesca em Silvino Jacques de Brígido IbanhesConferencistRosePradoNessuna valutazione finora
- Múmia AmeaçaDocumento1 paginaMúmia AmeaçaItszLizNessuna valutazione finora
- Técnico/a-Administrativo/a Referencial-EFADocumento73 pagineTécnico/a-Administrativo/a Referencial-EFAIcemanPort33% (3)
- Ficha Técnica 1° Festival GastronômicoDocumento7 pagineFicha Técnica 1° Festival GastronômicoEstefersonNessuna valutazione finora
- CB10.1 PS2 SLIMDocumento2 pagineCB10.1 PS2 SLIMcleber-27100% (1)
- História Da Rainha Constância... e Outras HistóriasDocumento77 pagineHistória Da Rainha Constância... e Outras HistóriasGraça Carita RodriguesNessuna valutazione finora
- BancaDocumento46 pagineBancaBruna SchlichtingNessuna valutazione finora