Potrebbero piacerti anche
- Alpha1 Series PC Communication Protocol561785 PDFDocumento1 paginaAlpha1 Series PC Communication Protocol561785 PDFnewahNessuna valutazione finora
- Chapter FourDocumento13 pagineChapter FourRoza MulukenNessuna valutazione finora
- Unit 3 Lecturer NotesDocumento48 pagineUnit 3 Lecturer NotessureshgurujiNessuna valutazione finora
- Lab 02Documento6 pagineLab 02FarazNessuna valutazione finora
- Hameg: Description of Interface CommandsDocumento19 pagineHameg: Description of Interface CommandsNaida HadžiibrahimovićNessuna valutazione finora
- Alesis D4-D5 Midi SpecificationDocumento9 pagineAlesis D4-D5 Midi SpecificationJoe EmenakerNessuna valutazione finora
- Xconsole Communication ProtocolDocumento7 pagineXconsole Communication Protocollauraibexe.comNessuna valutazione finora
- Instruction Formats in 8086Documento5 pagineInstruction Formats in 8086siitcentre100% (4)
- Unit 3 Students NotesDocumento18 pagineUnit 3 Students NotessureshgurujiNessuna valutazione finora
- HSR Serial CommunicationDocumento10 pagineHSR Serial CommunicationLe Dinh PhongNessuna valutazione finora
- Audio Coding G.711: FeaturesDocumento5 pagineAudio Coding G.711: FeaturesBelachew AndualemNessuna valutazione finora
- MODBUS COMMAND FOR V2 ProductsDocumento6 pagineMODBUS COMMAND FOR V2 ProductsSanjay SinghNessuna valutazione finora
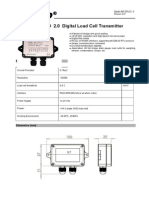
- RW-ST01D 2.0 ManualDocumento5 pagineRW-ST01D 2.0 ManualUndibal Alejandro RivasNessuna valutazione finora
- AM1000 Modbus Protocol en VA0Documento4 pagineAM1000 Modbus Protocol en VA0Pedro José Arjona GonzálezNessuna valutazione finora
- Interrupts: - Figure Shows A Time Line That Indicates A Typist TypingDocumento33 pagineInterrupts: - Figure Shows A Time Line That Indicates A Typist TypingVuggam VenkateshNessuna valutazione finora
- PPLADocumento55 paginePPLAdreamafonNessuna valutazione finora
- Sheet Ch:10Documento10 pagineSheet Ch:10LeenaNessuna valutazione finora
- Modbus Instructions For Cumark Drive 2020.08.09Documento6 pagineModbus Instructions For Cumark Drive 2020.08.09Sinan BasolNessuna valutazione finora
- Modbus-Map LG Master KDocumento10 pagineModbus-Map LG Master KmohammadNessuna valutazione finora
- Serial ProtocolDocumento10 pagineSerial ProtocolJohnNessuna valutazione finora
- PZEM 004T V3.0 Datasheet User ManualDocumento7 paginePZEM 004T V3.0 Datasheet User Manualeswaramoorthy subramanian0% (1)
- Sheet5 2011Documento4 pagineSheet5 2011Basem Abd ElazizNessuna valutazione finora
- Lexicon 300 V3 MIDI Implementation DetailsDocumento41 pagineLexicon 300 V3 MIDI Implementation DetailsStanleyNessuna valutazione finora
- STIK1014 A172assembler Project Mac2018Documento5 pagineSTIK1014 A172assembler Project Mac2018Visnu ManimaranNessuna valutazione finora
- PZEM-014/016 AC Communication Module: Software AddressDocumento7 paginePZEM-014/016 AC Communication Module: Software AddressNda SmuNessuna valutazione finora
- P ProtocolDocumento2 pagineP Protocolsapa3Nessuna valutazione finora
- 2018new Modbus Communication ProtocolDocumento2 pagine2018new Modbus Communication ProtocoladulqwulNessuna valutazione finora
- STM250 RS485 ProtocolDocumento6 pagineSTM250 RS485 ProtocolDanilo Antonio Reyes MorisNessuna valutazione finora
- Asm07 MachineLanguageDocumento6 pagineAsm07 MachineLanguageselva247Nessuna valutazione finora
- Experiment No. 06 Objective: To Learn L Logical InstructionsDocumento2 pagineExperiment No. 06 Objective: To Learn L Logical InstructionsEayashen ArafatNessuna valutazione finora
- DKP6008 Communication Protocol ReviewDocumento2 pagineDKP6008 Communication Protocol ReviewВася Пупкин100% (1)
- 7300EV MODBUS CommProtocol V2.0 (ENG)Documento14 pagine7300EV MODBUS CommProtocol V2.0 (ENG)Maitry ShahNessuna valutazione finora
- Bitwise OperatorsDocumento7 pagineBitwise OperatorsRamji PatelNessuna valutazione finora
- Bommireddy Rambabu: MPMC Ii-UnitDocumento12 pagineBommireddy Rambabu: MPMC Ii-UnitrambabuNessuna valutazione finora
- Micro Pross e orDocumento5 pagineMicro Pross e orMahfuz HasanNessuna valutazione finora
- Korg DW-8000 Service ManualDocumento47 pagineKorg DW-8000 Service ManualMatthew DavidsonNessuna valutazione finora
- Category Description Register Units Range Default NV User Notes Size (INT16)Documento19 pagineCategory Description Register Units Range Default NV User Notes Size (INT16)WenChenNessuna valutazione finora
- Objective: Theory:: Microprocessor & Microcontroller (CE-308)Documento4 pagineObjective: Theory:: Microprocessor & Microcontroller (CE-308)james peterNessuna valutazione finora
- Lab 1Documento5 pagineLab 1Amal FahadNessuna valutazione finora
- MSX Technical Handbook AppendixDocumento75 pagineMSX Technical Handbook AppendixfifetonNessuna valutazione finora
- Modbus Communication ProtocolDocumento3 pagineModbus Communication ProtocolJ HongNessuna valutazione finora
- 80x85 FormatDocumento17 pagine80x85 Formatnorberto_1Nessuna valutazione finora
- PZEM 014,016 SpecificationDocumento7 paginePZEM 014,016 SpecificationAztvNessuna valutazione finora
- Recent Singlecycle ProblemsDocumento58 pagineRecent Singlecycle ProblemsAlhassan RaadNessuna valutazione finora
- Instruction FormatDocumento10 pagineInstruction Formatmrpython456Nessuna valutazione finora
- PIC18Documento112 paginePIC18Keshav Reddy100% (1)
- IC HCS101 DatasheetDocumento20 pagineIC HCS101 Datasheetnaupas007Nessuna valutazione finora
- Midterm 1 SolutionDocumento6 pagineMidterm 1 SolutionsagarNessuna valutazione finora
- PZEM-004T (V3.0) User ManualDocumento7 paginePZEM-004T (V3.0) User ManualTriscziIpinkipunkkDhuatoejuhNessuna valutazione finora
- PFC Interface DefinitionDocumento49 paginePFC Interface DefinitionCarlos GranceNessuna valutazione finora
- Evotouch ProtocolDocumento10 pagineEvotouch ProtocolRoger SchobbenNessuna valutazione finora
- MF5700 Modbus Protocols PDFDocumento5 pagineMF5700 Modbus Protocols PDFPedro José Arjona GonzálezNessuna valutazione finora
- 10 Tm4C Tm4C: TXD RXDDocumento6 pagine10 Tm4C Tm4C: TXD RXDnhungdieubatchotNessuna valutazione finora
- DRS202M Modbus Register MapDocumento15 pagineDRS202M Modbus Register MapSocaciu VioricaNessuna valutazione finora
- Table 1a: The Complete MSP430 Instruction Set of 27 Core InstructionsDocumento9 pagineTable 1a: The Complete MSP430 Instruction Set of 27 Core Instructionsmanjus46Nessuna valutazione finora
- R4AVA07 ManualDocumento12 pagineR4AVA07 Manualsplinter inc100% (1)
- Test1-S 2014Documento3 pagineTest1-S 2014Prabhpreet Singh AjmaniNessuna valutazione finora
- Digital Signal Processing Using the ARM Cortex M4Da EverandDigital Signal Processing Using the ARM Cortex M4Valutazione: 1 su 5 stelle1/5 (1)
- IOCard USB Keys Manual 2012 REV2.0 EnglishDocumento12 pagineIOCard USB Keys Manual 2012 REV2.0 EnglishnewahNessuna valutazione finora
- Sound Effects Light EffectsDocumento2 pagineSound Effects Light EffectsnewahNessuna valutazione finora
- IOCard USB Relays Manual 2012 REV2 EnglishDocumento9 pagineIOCard USB Relays Manual 2012 REV2 EnglishnewahNessuna valutazione finora
- IOCard USB DcMotors Manual 2012 REV2.0 EnglishDocumento8 pagineIOCard USB DcMotors Manual 2012 REV2.0 Englishnewah100% (1)
- IOCard USB Axes Manual 2013 REV2.1 EnglishDocumento8 pagineIOCard USB Axes Manual 2013 REV2.1 EnglishnewahNessuna valutazione finora
- IOCard USB DcMotor Plus Manual 2012 REV1.0 EnglishDocumento14 pagineIOCard USB DcMotor Plus Manual 2012 REV1.0 EnglishnewahNessuna valutazione finora
- IOCard Displays II Manual 2012 REV2.2 EnglishDocumento12 pagineIOCard Displays II Manual 2012 REV2.2 EnglishnewahNessuna valutazione finora
- V737 OverheadDocumento50 pagineV737 OverheadnewahNessuna valutazione finora
- Certificari VirtualizareDocumento1 paginaCertificari VirtualizarenewahNessuna valutazione finora
- FMC 737 V3 Manual 2012 REV1.0 EnglishDocumento12 pagineFMC 737 V3 Manual 2012 REV1.0 EnglishnewahNessuna valutazione finora
- Change LogDocumento42 pagineChange LognewahNessuna valutazione finora
- Change LogDocumento42 pagineChange LognewahNessuna valutazione finora
- Change Log 2Documento136 pagineChange Log 2newahNessuna valutazione finora
- Operation User Manual (English) PDFDocumento10 pagineOperation User Manual (English) PDFnewahNessuna valutazione finora
- Operation User Manual (English) PDFDocumento10 pagineOperation User Manual (English) PDFnewahNessuna valutazione finora
- Alpha1 Series Bluetooth Communication Protocol565212Documento1 paginaAlpha1 Series Bluetooth Communication Protocol565212newahNessuna valutazione finora
- Certificari Si Examene VirtualizareDocumento1 paginaCertificari Si Examene VirtualizarenewahNessuna valutazione finora
- b737ng DSTD Pro M Feb2210Documento1 paginab737ng DSTD Pro M Feb2210newahNessuna valutazione finora
- Cursuri MOCDocumento30 pagineCursuri MOCnewahNessuna valutazione finora
- What's New in MDT 2010 GuideDocumento12 pagineWhat's New in MDT 2010 GuidedovydovNessuna valutazione finora
- Coreldraw TutorialDocumento25 pagineCoreldraw TutorialTaufik Abidin100% (21)
- DM2 0n-1abDocumento6 pagineDM2 0n-1abyus11Nessuna valutazione finora
- Self-Study Guidance - Basic Accounting. 15 Problems With Detailed Solutions.Documento176 pagineSelf-Study Guidance - Basic Accounting. 15 Problems With Detailed Solutions.Martin Teguh WibowoNessuna valutazione finora
- Group Terms&ConditionsDocumento5 pagineGroup Terms&Conditionsbelen rodriguezNessuna valutazione finora
- TUV300 T4 Plus Vs TUV300 T6 Plus Vs TUV300 T8 Vs TUV300 T10 - CarWaleDocumento12 pagineTUV300 T4 Plus Vs TUV300 T6 Plus Vs TUV300 T8 Vs TUV300 T10 - CarWalernbansalNessuna valutazione finora
- PRANIR ProfileDocumento14 paginePRANIR ProfileManish VadanereNessuna valutazione finora
- Magnetic Properties of MaterialsDocumento10 pagineMagnetic Properties of MaterialsNoviNessuna valutazione finora
- Bare Copper & Earthing Accessories SpecificationDocumento14 pagineBare Copper & Earthing Accessories SpecificationJayantha SampathNessuna valutazione finora
- INCOME TAX AND GST. JURAZ-Module 4Documento8 pagineINCOME TAX AND GST. JURAZ-Module 4TERZO IncNessuna valutazione finora
- Surveillance of Healthcare-Associated Infections in Indonesian HospitalsDocumento12 pagineSurveillance of Healthcare-Associated Infections in Indonesian HospitalsRidha MardiyaniNessuna valutazione finora
- Presentation On Plant LayoutDocumento20 paginePresentation On Plant LayoutSahil NayyarNessuna valutazione finora
- Unit III Sales and Retail ManagementDocumento16 pagineUnit III Sales and Retail ManagementMitali MishraNessuna valutazione finora
- Hippa and ISO MappingDocumento13 pagineHippa and ISO Mappingnidelel214Nessuna valutazione finora
- Spark - Eastern Peripheral Road Project (Epr) Weekly Quality MeetingDocumento6 pagineSpark - Eastern Peripheral Road Project (Epr) Weekly Quality Meetingengr.s.a.malik6424Nessuna valutazione finora
- Oliva - A Maturity Model For Enterprise Risk ManagementDocumento14 pagineOliva - A Maturity Model For Enterprise Risk ManagementErika FerreiraNessuna valutazione finora
- Submitted To: Sir Ahmad Mujtaba Submitted By: Museera Maqbool Roll No: L-21318 Course: Service Marketing Programme: MBA 1.5 (Evening)Documento3 pagineSubmitted To: Sir Ahmad Mujtaba Submitted By: Museera Maqbool Roll No: L-21318 Course: Service Marketing Programme: MBA 1.5 (Evening)GlobalNessuna valutazione finora
- SYKES - Telework Work Area AgreementDocumento2 pagineSYKES - Telework Work Area AgreementFritz PrejeanNessuna valutazione finora
- Victory Magazine 2012 PDFDocumento19 pagineVictory Magazine 2012 PDFijojlNessuna valutazione finora
- Pepsi IMCDocumento19 paginePepsi IMCMahi Teja0% (2)
- Lecun 20201027 AttDocumento72 pagineLecun 20201027 AttEfrain TitoNessuna valutazione finora
- Muji Into Denmark MarketDocumento13 pagineMuji Into Denmark MarketTròn QuayyNessuna valutazione finora
- Test P1 Chapter 10Documento10 pagineTest P1 Chapter 10Prince PersiaNessuna valutazione finora
- MSSQL and Devops DumpsDocumento5 pagineMSSQL and Devops DumpsRishav GuptaNessuna valutazione finora
- BIR Form 2307Documento20 pagineBIR Form 2307Lean Isidro0% (1)
- MCQ (Chapter 6)Documento4 pagineMCQ (Chapter 6)trail meNessuna valutazione finora
- Nammcesa 000010 PDFDocumento1.543 pagineNammcesa 000010 PDFBasel Osama RaafatNessuna valutazione finora
- Abhijit Auditorium Elective Sem 09Documento3 pagineAbhijit Auditorium Elective Sem 09Abhijit Kumar AroraNessuna valutazione finora
- Life Lessons AssignmentDocumento5 pagineLife Lessons Assignmentapi-332560669Nessuna valutazione finora
- PCB Design PCB Design: Dr. P. C. PandeyDocumento13 paginePCB Design PCB Design: Dr. P. C. PandeyengshimaaNessuna valutazione finora
- Nilfisck SR 1601 DDocumento43 pagineNilfisck SR 1601 DGORDNessuna valutazione finora
- Elo BLP Neutral en Web.5573Documento8 pagineElo BLP Neutral en Web.5573Ichsanul AnamNessuna valutazione finora