Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Fixing Cognitive DistortionsDocumento2 pagineFixing Cognitive Distortionslord_eufroc100% (1)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Framework of Ethical Decision MakingDocumento16 pagineFramework of Ethical Decision MakingRENU KHATRI100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Employability SkillsDocumento14 pagineEmployability SkillsTanvir HossainNessuna valutazione finora
- Managing Motivation in Difficult EconomyDocumento3 pagineManaging Motivation in Difficult EconomyBahala Nakauroy100% (1)
- David HumeDocumento7 pagineDavid HumePaul Kallan100% (1)
- Issues and EthicsDocumento17 pagineIssues and EthicsJodi Chin0% (1)
- Ethical LeadershipDocumento18 pagineEthical Leadershipbappa85100% (3)
- Currie - Image and MindDocumento329 pagineCurrie - Image and MindVero Mena100% (1)
- Middle Childhood Reflection Paper FinalDocumento4 pagineMiddle Childhood Reflection Paper Finalapi-349363475100% (4)
- Organisation Theory and ManagementDocumento173 pagineOrganisation Theory and Managementkeenodiid0% (1)
- Capital S Grabbing Hand A Cross-Country-Cross Industry Analysis of The Decline of The Labour ShareDocumento43 pagineCapital S Grabbing Hand A Cross-Country-Cross Industry Analysis of The Decline of The Labour ShareEnrique Alan Lastire OlmedoNessuna valutazione finora
- Jones2 Solutions PDFDocumento46 pagineJones2 Solutions PDFClaudia Islas VergaraNessuna valutazione finora
- Microeconomic Theory Solution Manual - Mas-ColellDocumento758 pagineMicroeconomic Theory Solution Manual - Mas-Colellmjkhumalo0% (1)
- A Core of Practical MacroeconomicsDocumento3 pagineA Core of Practical MacroeconomicsEnrique Alan Lastire OlmedoNessuna valutazione finora
- Geometric Hamilton-Jacobi TheoryDocumento40 pagineGeometric Hamilton-Jacobi TheoryEnrique Alan Lastire OlmedoNessuna valutazione finora
- RudinDocumento26 pagineRudinqwsx098Nessuna valutazione finora
- Gut Feelings? Cold Feet? Body Maps Show Where Emotions GoDocumento2 pagineGut Feelings? Cold Feet? Body Maps Show Where Emotions GoK Krishna RaoNessuna valutazione finora
- Holton2007 PDFDocumento24 pagineHolton2007 PDFMaledictumNessuna valutazione finora
- 360 Degree Feedback & Performance Management SystemDocumento20 pagine360 Degree Feedback & Performance Management SystemShruti S KumarNessuna valutazione finora
- Managemet MCQs-2Documento15 pagineManagemet MCQs-2chikka28Nessuna valutazione finora
- Jean-Paul Sartre P Grosse Process and Themes FALL 2002Documento2 pagineJean-Paul Sartre P Grosse Process and Themes FALL 2002Cris Carry-on100% (1)
- Organizational Learning - Creating, Retaining, and Transferring Knowledge - 2000Documento5 pagineOrganizational Learning - Creating, Retaining, and Transferring Knowledge - 2000Asim JahangirNessuna valutazione finora
- Covarrubias 2017Documento4 pagineCovarrubias 2017NICOLÁS ANDRÉS AYELEF PARRAGUEZNessuna valutazione finora
- Cultural Difference Between Brazil and ItalyDocumento4 pagineCultural Difference Between Brazil and Italybrandon ambosta100% (1)
- MPC 2Documento141 pagineMPC 2Surya Budi WidagdoNessuna valutazione finora
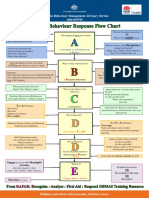
- Behaviour Response Flow Chart 5 Nov 2012Documento1 paginaBehaviour Response Flow Chart 5 Nov 2012jakilaNessuna valutazione finora
- Checklist For Assessing StudentsDocumento2 pagineChecklist For Assessing StudentsPablo Ragay JrNessuna valutazione finora
- Educational Leadership & Management (EDU602)Documento6 pagineEducational Leadership & Management (EDU602)Ikram ChaudharyNessuna valutazione finora
- Leadership Style in CIMB BankDocumento2 pagineLeadership Style in CIMB BankLiza Turapbayeva50% (2)
- CH 3 CBDocumento40 pagineCH 3 CBSuvam PatelNessuna valutazione finora
- Case Studies - Operations Research and ManagementDocumento12 pagineCase Studies - Operations Research and ManagementVineet NairNessuna valutazione finora
- The Emerging Markets Century: How A New Breed of World-Class Companies Is Overtaking The WorldDocumento4 pagineThe Emerging Markets Century: How A New Breed of World-Class Companies Is Overtaking The WorldLuis MalaverNessuna valutazione finora
- Bernardo A. B. I. Clemente J. A. R. and PDFDocumento9 pagineBernardo A. B. I. Clemente J. A. R. and PDFJayson Ryan De LeonNessuna valutazione finora
- Ungky Pawestri, Soeyono Ira KurniawatiDocumento7 pagineUngky Pawestri, Soeyono Ira KurniawatiEagle StarNessuna valutazione finora
- Relationships PresentationDocumento14 pagineRelationships PresentationmnogadeNessuna valutazione finora
- Ruth G. Millikan - Philosophy DepartmentDocumento3 pagineRuth G. Millikan - Philosophy DepartmenturliaNessuna valutazione finora