Potrebbero piacerti anche
- Computer Architecture FundamentalsDocumento47 pagineComputer Architecture FundamentalsASIF MNessuna valutazione finora
- Unit 4 FocDocumento57 pagineUnit 4 FocGayatri AkkivalliNessuna valutazione finora
- Computer CourseDocumento62 pagineComputer CourseKoram TomboyNessuna valutazione finora
- Two-Marks Material Computer ArchitectureDocumento35 pagineTwo-Marks Material Computer ArchitectureJbr RaheemNessuna valutazione finora
- EC8552 Computer Architecture and Organization Notes 1Documento106 pagineEC8552 Computer Architecture and Organization Notes 1Ambedkar RajanNessuna valutazione finora
- Introduction To ComputersDocumento97 pagineIntroduction To Computersyoboiiii649Nessuna valutazione finora
- Computer Performancce IdeasDocumento29 pagineComputer Performancce IdeasLathaNessuna valutazione finora
- Evolution of Computer ScienceDocumento29 pagineEvolution of Computer ScienceBidrohi TollatNessuna valutazione finora
- Problem Solving & Programming Notes - Unit - IDocumento46 pagineProblem Solving & Programming Notes - Unit - ISmd nazeebNessuna valutazione finora
- Unit 1 - Basic Computer EngineeringDocumento27 pagineUnit 1 - Basic Computer Engineeringgenokol858Nessuna valutazione finora
- Magna College of EngineeringDocumento9 pagineMagna College of Engineeringsoundharya03Nessuna valutazione finora
- Radian Ias Academy (Feb.2013) Computer AwarenessDocumento20 pagineRadian Ias Academy (Feb.2013) Computer AwarenessjosekinNessuna valutazione finora
- Complete CO Notes 5UNITSDocumento218 pagineComplete CO Notes 5UNITS560 KarthikNessuna valutazione finora
- Computer AssignmentDocumento4 pagineComputer AssignmentRichid1234Nessuna valutazione finora
- Notes On ComputerDocumento46 pagineNotes On Computer2nablsNessuna valutazione finora
- Rajagiri School of Engineering and TechnologyDocumento44 pagineRajagiri School of Engineering and TechnologyBennet MathewNessuna valutazione finora
- Final Co Notes 1 38Documento38 pagineFinal Co Notes 1 38kaveri.h.hulimani1993Nessuna valutazione finora
- FOC Notes Unit 1 and Unit 2 PDFDocumento46 pagineFOC Notes Unit 1 and Unit 2 PDFhill_rws407Nessuna valutazione finora
- Student NotesDocumento11 pagineStudent Noteskuldeep choudharyNessuna valutazione finora
- CS 8491 Computer ArchitectureDocumento103 pagineCS 8491 Computer ArchitectureMUKESH KUMAR P 2019-2023 CSENessuna valutazione finora
- Empowerment Chapter-1Documento27 pagineEmpowerment Chapter-1John Lester M. Dela Cruz100% (1)
- RGMCET IT Workshop Manual FundamentalsDocumento166 pagineRGMCET IT Workshop Manual FundamentalssureshexecutiveNessuna valutazione finora
- Computer Organization - IntroductionDocumento69 pagineComputer Organization - IntroductiongmgaargiNessuna valutazione finora
- Module 1 TEACHING ICT EXPLORATORYDocumento25 pagineModule 1 TEACHING ICT EXPLORATORYJane Vistal LicoNessuna valutazione finora
- Chapter 4Documento15 pagineChapter 4Sudarshan SharmaNessuna valutazione finora
- Ec6009 Unit-1Documento36 pagineEc6009 Unit-1Sherril VincentNessuna valutazione finora
- Fundamentals of Computer Systems and Programming ExplainedDocumento46 pagineFundamentals of Computer Systems and Programming ExplainedJasonStanton50% (4)
- Computer CourseDocumento20 pagineComputer CourseAnu RadhaNessuna valutazione finora
- IT for Managers Lecture NotesDocumento58 pagineIT for Managers Lecture NotespearkuNessuna valutazione finora
- Basics of Computer SystemDocumento61 pagineBasics of Computer Systemshahiddange05Nessuna valutazione finora
- Introduction To ComputerDocumento74 pagineIntroduction To ComputerJade TobiasNessuna valutazione finora
- CACS101 CFA Unit 1Documento14 pagineCACS101 CFA Unit 1Anjali KapoorNessuna valutazione finora
- Digital Basics and Computer ComponentsDocumento31 pagineDigital Basics and Computer ComponentsADITYA KUMAR0% (1)
- Computer Organisation & Architecture: UNIT-1Documento37 pagineComputer Organisation & Architecture: UNIT-1Sarthak GuptaNessuna valutazione finora
- Computer Fundamentals and OperationsDocumento47 pagineComputer Fundamentals and OperationsAlgine EscolNessuna valutazione finora
- Cs 6303 Unit 1Documento90 pagineCs 6303 Unit 1Raghu Raman DuraiswamyNessuna valutazione finora
- اساسيات الحاسوب المحاضرة الاولىDocumento32 pagineاساسيات الحاسوب المحاضرة الاولىFatimah Malk MohsenNessuna valutazione finora
- Advanced Computer Architecture: CSE-401 EDocumento71 pagineAdvanced Computer Architecture: CSE-401 EJitender GargNessuna valutazione finora
- Basics of Parallel Programming: Unit-1Documento79 pagineBasics of Parallel Programming: Unit-1jai shree krishnaNessuna valutazione finora
- Unit 2 Computer Systems: StructureDocumento13 pagineUnit 2 Computer Systems: StructureCamilo AmarcyNessuna valutazione finora
- Computer Architecture and Organization: Adigrat University Electrical and Computer Engineering Dep'tDocumento35 pagineComputer Architecture and Organization: Adigrat University Electrical and Computer Engineering Dep'tmillionNessuna valutazione finora
- Chapter 1Documento24 pagineChapter 1Ermias TegenawNessuna valutazione finora
- CO&A 18EC35 Module-1 Notes Dileep Kumar K SDocumento32 pagineCO&A 18EC35 Module-1 Notes Dileep Kumar K SThanushree RMNessuna valutazione finora
- Notes 1Documento9 pagineNotes 1Purity Kangogo100% (1)
- 41 PDFDocumento135 pagine41 PDFyNessuna valutazione finora
- Computer - Introduction To Computer - English - 1599804024Documento18 pagineComputer - Introduction To Computer - English - 1599804024sadafmirzaNessuna valutazione finora
- Lec 1 - Lec2 Introduction - & EvolutionDocumento15 pagineLec 1 - Lec2 Introduction - & EvolutionKimani MaithyaNessuna valutazione finora
- Unit 1 - Overview and InstructionsDocumento29 pagineUnit 1 - Overview and InstructionsreenaanandhNessuna valutazione finora
- Computer FundamentalsDocumento19 pagineComputer FundamentalsPaneendra KumarNessuna valutazione finora
- Compskill1 7Documento7 pagineCompskill1 7Nikhil YadavNessuna valutazione finora
- Coding Notes For SemsDocumento27 pagineCoding Notes For SemsArani DasguptaNessuna valutazione finora
- Computer Organization & Architecture (KCA 105) : DR Manmohan Mishra Associate Professor MCA, DepartmentDocumento87 pagineComputer Organization & Architecture (KCA 105) : DR Manmohan Mishra Associate Professor MCA, DepartmentDolly SrivastavaNessuna valutazione finora
- 1 Sem Btech - Fundamentals of Computers Part 1Documento140 pagine1 Sem Btech - Fundamentals of Computers Part 1Sumit Raj ShahNessuna valutazione finora
- Chapter 1 COALDocumento46 pagineChapter 1 COALShahzael MughalNessuna valutazione finora
- CofaDocumento286 pagineCofamhommad saifNessuna valutazione finora
- Mod 2Documento20 pagineMod 2PraneethNessuna valutazione finora
- Lec 1 FITDocumento22 pagineLec 1 FITashiriqbal939Nessuna valutazione finora
- Fundamentals of IS-Module IDocumento96 pagineFundamentals of IS-Module IEdenNessuna valutazione finora
- Class 1 Computer - Introdcution and Type of Computer 1Documento58 pagineClass 1 Computer - Introdcution and Type of Computer 1nonukhatri33Nessuna valutazione finora
- Fundamentals of Modern Computer Architecture: From Logic Gates to Parallel ProcessingDa EverandFundamentals of Modern Computer Architecture: From Logic Gates to Parallel ProcessingNessuna valutazione finora
- Automatic Volumetric Measurement ofDocumento9 pagineAutomatic Volumetric Measurement ofharsathsamuelNessuna valutazione finora
- S E D OF Mechaincal Engineering: Athmandu NiversityDocumento28 pagineS E D OF Mechaincal Engineering: Athmandu NiversitySURESHNessuna valutazione finora
- Round 3 MaterialDocumento2 pagineRound 3 MaterialharsathsamuelNessuna valutazione finora
- CS 2012 Solved PDFDocumento30 pagineCS 2012 Solved PDFAishwaryaNawkarNessuna valutazione finora
- Engine SpecsDocumento4 pagineEngine SpecsharsathsamuelNessuna valutazione finora
- UNIT 1 CaDocumento41 pagineUNIT 1 CaharsathsamuelNessuna valutazione finora
- IInd UnitDocumento36 pagineIInd UnitharsathsamuelNessuna valutazione finora
- UNIT 1 CaDocumento41 pagineUNIT 1 CaharsathsamuelNessuna valutazione finora
- Halley's Comet: Facts About The Most Famous CometDocumento10 pagineHalley's Comet: Facts About The Most Famous CometharsathsamuelNessuna valutazione finora
- Samsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFDocumento77 pagineSamsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFSiengNessuna valutazione finora
- Health & Safety and Installation Guide for DishwashersDocumento8 pagineHealth & Safety and Installation Guide for DishwashersRuben TavaresNessuna valutazione finora
- Fuel Gas Filter Skid Start-Up and Operation ManualDocumento14 pagineFuel Gas Filter Skid Start-Up and Operation Manualczekjo100% (1)
- Bernina Aurora 430, 440 QE, 450 User Guide & ManualDocumento86 pagineBernina Aurora 430, 440 QE, 450 User Guide & ManualJeanne GoldNessuna valutazione finora
- 4 PDFDocumento1 pagina4 PDFranickng1Nessuna valutazione finora
- 04 Cuculic Celic PrencDocumento8 pagine04 Cuculic Celic PrencStanislava RokvicNessuna valutazione finora
- Delco Wire CatalogDocumento80 pagineDelco Wire Catalogrkonc100% (1)
- Eng Va-3 18502874 FlamcoDocumento20 pagineEng Va-3 18502874 Flamcoflore_02Nessuna valutazione finora
- Form 2: Residential Loads Feeder 1: Use: 100 KVADocumento38 pagineForm 2: Residential Loads Feeder 1: Use: 100 KVAZaul tatingNessuna valutazione finora
- Index ChillDocumento95 pagineIndex Chillreezqee100% (1)
- ZF TERRAPOWER TPT 20 transmission overviewDocumento2 pagineZF TERRAPOWER TPT 20 transmission overviewMiguelNessuna valutazione finora
- 2022.03.03 - Toda - Murata (OP1 - SLD3 Glass) - Xoa FixDocumento14 pagine2022.03.03 - Toda - Murata (OP1 - SLD3 Glass) - Xoa FixHiếu NguyễnNessuna valutazione finora
- Physical Transmission MediaDocumento47 paginePhysical Transmission MediaabdulazizNessuna valutazione finora
- Sym Jet4 125 Owners Manual Eng PDFDocumento24 pagineSym Jet4 125 Owners Manual Eng PDFJulwen100% (2)
- H16-22XM-12EC Empty Container Handlers Offer Class-Leading PerformanceDocumento24 pagineH16-22XM-12EC Empty Container Handlers Offer Class-Leading PerformanceEjaz EjazNessuna valutazione finora
- Short Range Radar SystemDocumento14 pagineShort Range Radar Systemsiri velpulaNessuna valutazione finora
- 1 1 1 A B SimplemachinesinclinedplanewedgescrewDocumento19 pagine1 1 1 A B Simplemachinesinclinedplanewedgescrewapi-366546603Nessuna valutazione finora
- High Performance Double Eccentric Butterfly ValvesDocumento16 pagineHigh Performance Double Eccentric Butterfly ValvesPanagiotis PanagosNessuna valutazione finora
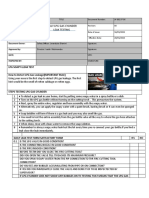
- b206 Check ListDocumento24 pagineb206 Check ListSandiego Alexander100% (1)
- P Series Strain GaugesDocumento1 paginaP Series Strain Gaugesjbmune6683Nessuna valutazione finora
- Daily LPG Cylinder Leakage TestDocumento2 pagineDaily LPG Cylinder Leakage TestLwandziso DlaminiNessuna valutazione finora
- Fischer FH II High Performance AnchorDocumento5 pagineFischer FH II High Performance AnchorJaga NathNessuna valutazione finora
- LEVEL III - ATA 25 Equipment - FurnishingDocumento72 pagineLEVEL III - ATA 25 Equipment - Furnishingwagdi0% (1)
- 6 BLP Spesifikasi Teknis NOC 14920Documento3 pagine6 BLP Spesifikasi Teknis NOC 14920Ka BudiKaNessuna valutazione finora
- PUMA M5.2EX maintenance and exploded viewsDocumento1 paginaPUMA M5.2EX maintenance and exploded viewsJORGE C. CHAO R.Nessuna valutazione finora
- 1997 3800 PCM Fiero WiringDocumento3 pagine1997 3800 PCM Fiero WiringDamián Martínez SánchezNessuna valutazione finora
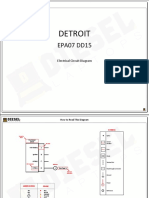
- Detroit - DD15 EPA07 (2007-09) .Engine WiringDocumento9 pagineDetroit - DD15 EPA07 (2007-09) .Engine Wiringroberto martir100% (6)
- FW 03Documento13 pagineFW 03xerwaneNessuna valutazione finora
- HyundaiDocumento11 pagineHyundaiSebastian BryceNessuna valutazione finora
- Mfge09l 1Documento6 pagineMfge09l 1Joseph ZamoraNessuna valutazione finora