Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Wind Tunnels, Test Stands: and ComponentsDocumento20 pagineWind Tunnels, Test Stands: and ComponentsLuiz CostaNessuna valutazione finora
- Friction and Dry Sliding Wear Behavior of Red MudDocumento13 pagineFriction and Dry Sliding Wear Behavior of Red MudAnkushNessuna valutazione finora
- The Multi-Objective Decision Making Methods Based On MULTIMOORA and MOOSRA For The Laptop Selection ProblemDocumento9 pagineThe Multi-Objective Decision Making Methods Based On MULTIMOORA and MOOSRA For The Laptop Selection ProblemAnkushNessuna valutazione finora
- Effect of The Marble Powder and Wood Powder Content On The Technological Properties of Thermoplastic CompositesDocumento4 pagineEffect of The Marble Powder and Wood Powder Content On The Technological Properties of Thermoplastic CompositesAnkushNessuna valutazione finora
- Lau Ney 2009Documento8 pagineLau Ney 2009AnkushNessuna valutazione finora
- Effect of The Marble Powder and Wood Powder Content On The Technological Properties of Thermoplastic CompositesDocumento4 pagineEffect of The Marble Powder and Wood Powder Content On The Technological Properties of Thermoplastic CompositesAnkushNessuna valutazione finora
- ADocumento1 paginaAAnkushNessuna valutazione finora
- Boey 1990Documento15 pagineBoey 1990AnkushNessuna valutazione finora
- Crack Path Predictions in Fiber Reinforced Composites Crack Path Predictions in Fiber Reinforced CompositesDocumento8 pagineCrack Path Predictions in Fiber Reinforced Composites Crack Path Predictions in Fiber Reinforced CompositesAnkushNessuna valutazione finora
- 592906Documento11 pagine592906AnkushNessuna valutazione finora
- 936912Documento23 pagine936912AnkushNessuna valutazione finora
- Multiphase Finite Element Modeling of Machining Unidirectional Composites: Prediction of Debonding and Fiber DamageDocumento12 pagineMultiphase Finite Element Modeling of Machining Unidirectional Composites: Prediction of Debonding and Fiber DamageAnkushNessuna valutazione finora
- Andre 2016Documento10 pagineAndre 2016AnkushNessuna valutazione finora
- Number Systems: Location in Course TextbookDocumento64 pagineNumber Systems: Location in Course Textbookhaboooooosh1188Nessuna valutazione finora
- Fawaz 2004 Numerical Simulation of Normal and Oblique Ballistic ImpactDocumento9 pagineFawaz 2004 Numerical Simulation of Normal and Oblique Ballistic ImpactAnkushNessuna valutazione finora
- Introduction To Multi-Criteria Decision MakingDocumento4 pagineIntroduction To Multi-Criteria Decision MakingAnkushNessuna valutazione finora
- Sandeep2011 - Thermo-Mechanical Correlations To Erosion Performance of Short Carbon FibreDocumento9 pagineSandeep2011 - Thermo-Mechanical Correlations To Erosion Performance of Short Carbon FibreAnkushNessuna valutazione finora
- Casting & Welding Theory & Questions Altogethre 2013Documento66 pagineCasting & Welding Theory & Questions Altogethre 2013Stark029Nessuna valutazione finora
- Dropwise and Filmwise Condensation PDFDocumento5 pagineDropwise and Filmwise Condensation PDFmustafa100% (2)
- Fabrication and Analysis of Micro-Pillars by Abrasive Water Jet MachiningDocumento11 pagineFabrication and Analysis of Micro-Pillars by Abrasive Water Jet MachiningAnkushNessuna valutazione finora
- 0334 PDFDocumento5 pagine0334 PDFAnkushNessuna valutazione finora
- Techniques For Measuring Stress-Strain Relations at High Strain RatesDocumento8 pagineTechniques For Measuring Stress-Strain Relations at High Strain RatesAnkushNessuna valutazione finora
- 1 s2.0 S0927025612001589 MainDocumento11 pagine1 s2.0 S0927025612001589 MainAnkushNessuna valutazione finora
- Automated Composite Fabric Layup For Wind Turbine Blades: Siqi ZhuDocumento10 pagineAutomated Composite Fabric Layup For Wind Turbine Blades: Siqi ZhuAnkushNessuna valutazione finora
- 2014 Heat Transfer PDFDocumento2 pagine2014 Heat Transfer PDFAnkushNessuna valutazione finora
- 1 s2.0 S0043164817303332 MainDocumento9 pagine1 s2.0 S0043164817303332 MainAnkushNessuna valutazione finora
- Fan 2008Documento15 pagineFan 2008AnkushNessuna valutazione finora
- Feli2011 - Finite Element Simulation of Ceramiccomposite Armor Under Ballistic Impact PDFDocumento10 pagineFeli2011 - Finite Element Simulation of Ceramiccomposite Armor Under Ballistic Impact PDFAnkushNessuna valutazione finora
- Zaretsky2013-High Temperature Impact Response of 998 AluminaDocumento8 pagineZaretsky2013-High Temperature Impact Response of 998 AluminaAnkushNessuna valutazione finora
- Simulation of Ballistic Impacts On Armored Civil VehiclesDocumento101 pagineSimulation of Ballistic Impacts On Armored Civil Vehiclesau00843929100% (1)
- Power Systems Relays (ETD 35) - Electrotechnical Division-Public Safety Standards of IndiaDocumento3 paginePower Systems Relays (ETD 35) - Electrotechnical Division-Public Safety Standards of IndiamaninderpreetNessuna valutazione finora
- Tabla Comparativa Baterias TKDocumento6 pagineTabla Comparativa Baterias TKJose Angel Mayor ParraNessuna valutazione finora
- Och752 Energy Technology 1Documento11 pagineOch752 Energy Technology 1Aravind AravindNessuna valutazione finora
- EIE321 Module 2Documento65 pagineEIE321 Module 2Opeyemi OrugunNessuna valutazione finora
- Datasheet e Inmetro-1-4Documento4 pagineDatasheet e Inmetro-1-4Fernanda MagnoNessuna valutazione finora
- Active Operation of Hydrogen Fuelling Stations To Support Renewable IntegrationDocumento6 pagineActive Operation of Hydrogen Fuelling Stations To Support Renewable IntegrationDiego CamachoNessuna valutazione finora
- SLD 2Documento48 pagineSLD 2madev21413Nessuna valutazione finora
- Mechanical Properties of Fluids: Chapter TenDocumento20 pagineMechanical Properties of Fluids: Chapter TenjjNessuna valutazione finora
- Sick - Ue 43mfDocumento4 pagineSick - Ue 43mfchnanduNessuna valutazione finora
- Fluid Chapter 3Documento31 pagineFluid Chapter 3ALNessuna valutazione finora
- CHEM 141 #E-305 Post - Lab AnalysisDocumento7 pagineCHEM 141 #E-305 Post - Lab Analysischalden25Nessuna valutazione finora
- CE Module 9 - Physics (Answer Key)Documento5 pagineCE Module 9 - Physics (Answer Key)Angelice Alliah De la CruzNessuna valutazione finora
- Pumps TurbinesDocumento45 paginePumps Turbinesapi-19799147Nessuna valutazione finora
- Applied Physics by M KumarDocumento43 pagineApplied Physics by M KumarheloverNessuna valutazione finora
- Transistor Blocking Oscillator Analysis : Summary-Two ADocumento7 pagineTransistor Blocking Oscillator Analysis : Summary-Two AmcamhkNessuna valutazione finora
- Stat ComDocumento13 pagineStat ComSanthi Manoj VaddiNessuna valutazione finora
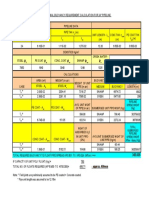
- 24in Pipeline Buoyancy CalculationDocumento1 pagina24in Pipeline Buoyancy CalculationDivesh rahulNessuna valutazione finora
- IOQP Part I NSEP SolutionDocumento10 pagineIOQP Part I NSEP SolutionAditya MondalNessuna valutazione finora
- 74LS123Documento10 pagine74LS123jonat09Nessuna valutazione finora
- Lecture 1 - Rankine Power CyclesDocumento5 pagineLecture 1 - Rankine Power CyclesMuhammad Alam Zaib KhanNessuna valutazione finora
- Fundamentals of Automotive Electricity & ElectronicsDocumento83 pagineFundamentals of Automotive Electricity & ElectronicsJohnny Ym100% (1)
- Compresor Quincy QGV100Documento1 paginaCompresor Quincy QGV100Luis LoredoNessuna valutazione finora
- Diagrama Hyundai 210Documento8 pagineDiagrama Hyundai 210Marcelo LanaNessuna valutazione finora
- Convabbrevstech PDFDocumento1 paginaConvabbrevstech PDFdhikaNessuna valutazione finora
- Applications of Sensors On CNC Machine Tools - UtmelDocumento10 pagineApplications of Sensors On CNC Machine Tools - Utmeljayakrishnan psNessuna valutazione finora
- Ele3209 Assignment 2018Documento1 paginaEle3209 Assignment 2018aisha nakatoNessuna valutazione finora
- Elec Workshop Mid 2016 TestDocumento6 pagineElec Workshop Mid 2016 TestJermain PeartNessuna valutazione finora