Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
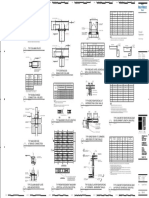
- S5-01 - Typical DetailsDocumento1 paginaS5-01 - Typical DetailsArdser AvicoNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- US Hex Bolt SizesDocumento2 pagineUS Hex Bolt SizesYana Jarang OlNessuna valutazione finora
- SAE Flat Washer Size ChartDocumento1 paginaSAE Flat Washer Size ChartArdser AvicoNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- ScrewDocumento5 pagineScrewiqbaljuttNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Metric Hex Bolt ChartsDocumento1 paginaMetric Hex Bolt ChartsPraburamNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- SAE Flat Washer Size ChartDocumento1 paginaSAE Flat Washer Size ChartArdser AvicoNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Optional Tail Special Instructions: For More Info and Guides, Please VisitDocumento5 pagineOptional Tail Special Instructions: For More Info and Guides, Please VisitArdser Avico100% (1)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Metric/Imperial Screw Conversion ChartDocumento1 paginaMetric/Imperial Screw Conversion ChartArdser AvicoNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- RuleDocumento1 paginaRuledillehNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Weld Joint Design and Weld SymbolDocumento49 pagineWeld Joint Design and Weld SymbolArdser Avico100% (2)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Pernos EquivalenciasDocumento2 paginePernos EquivalenciasEnriqueGDNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Lab Manual Tutorial Part1Documento12 pagineLab Manual Tutorial Part1Ardser AvicoNessuna valutazione finora
- Weld Symbols On DrawingsDocumento25 pagineWeld Symbols On Drawingshombre.muerto5959100% (2)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Welding SymbolDocumento11 pagineWelding SymbolManv2211Nessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Library IeeeDocumento3 pagineLibrary IeeeArdser AvicoNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Team Gobi FinalReportDocumento51 pagineTeam Gobi FinalReportArdser AvicoNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Welding PositionDocumento6 pagineWelding Positionenels77Nessuna valutazione finora
- Pmodkypd: Kpd1 R1 10K R2 10K R3 10K R4Documento1 paginaPmodkypd: Kpd1 R1 10K R2 10K R3 10K R4Ardser AvicoNessuna valutazione finora
- Translate UARTDocumento3 pagineTranslate UARTArdser AvicoNessuna valutazione finora
- Pmodkypd: Kpd1 R1 10K R2 10K R3 10K R4Documento1 paginaPmodkypd: Kpd1 R1 10K R2 10K R3 10K R4Ardser AvicoNessuna valutazione finora
- ISE Installation, LicensingDocumento54 pagineISE Installation, LicensingardserNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- VHDL 2di4341334Documento112 pagineVHDL 2di4341334ardserNessuna valutazione finora
- Jual: Alat Tulis, Kertas, Percetakan, Print, DLLDocumento15 pagineJual: Alat Tulis, Kertas, Percetakan, Print, DLLArdser AvicoNessuna valutazione finora
- Library IEE1Documento3 pagineLibrary IEE1Ardser AvicoNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- HaskellDocumento158 pagineHaskellArdser AvicoNessuna valutazione finora
- Watchdog Timer For ATMDocumento47 pagineWatchdog Timer For ATMm_sushil29Nessuna valutazione finora
- Eeeb161 Lab ReportDocumento7 pagineEeeb161 Lab ReportRoxas Nabeyl0% (1)
- WorstDocumento478 pagineWorstaamina ShahNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Lecture3 - Logic Operation FundamentalsDocumento64 pagineLecture3 - Logic Operation FundamentalsTrần Quốc ToảnNessuna valutazione finora
- Using The ADC0808/ ADC0809 8-Bit MP Compatible A/D Converters With 8-Channel Analog MultiplexerDocumento16 pagineUsing The ADC0808/ ADC0809 8-Bit MP Compatible A/D Converters With 8-Channel Analog MultiplexerSantiago SerranoNessuna valutazione finora
- Combinational Logic Circuit: University of Perpetual Help System DaltaDocumento17 pagineCombinational Logic Circuit: University of Perpetual Help System DaltaJohn Kenneth BulabosNessuna valutazione finora
- Programming Skill in CDocumento41 pagineProgramming Skill in CSHUBHAMKAR JOSHINessuna valutazione finora
- Lab Manual: Submmitted byDocumento70 pagineLab Manual: Submmitted byMuhammad owais Muhammad munirNessuna valutazione finora
- Read The Entire Specification Before You Begin Working On This Project!Documento5 pagineRead The Entire Specification Before You Begin Working On This Project!Muhammad ArslanNessuna valutazione finora
- Digital System Objective QuestionsDocumento17 pagineDigital System Objective QuestionsRanjeet pratap singh bhadoriyaNessuna valutazione finora
- LAB With Experiments DetailsDocumento14 pagineLAB With Experiments DetailsMohd Helmy Hakimie RozlanNessuna valutazione finora
- Cambridge IGCSE Computer Science 2nd Edition Workbook 2 (Algorithms, Programming and Logic)Documento74 pagineCambridge IGCSE Computer Science 2nd Edition Workbook 2 (Algorithms, Programming and Logic)Jiawei YeNessuna valutazione finora
- NGD18N40CLBT4 Ignition IGBT 18 Amps, 400 VoltsDocumento8 pagineNGD18N40CLBT4 Ignition IGBT 18 Amps, 400 VoltsEudis HernandezNessuna valutazione finora
- A Project On Car Security System OriginalDocumento12 pagineA Project On Car Security System OriginalEesha. ParuchuriNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Question Bank - 2131004 - DE - New - 11082016 - 075548AMDocumento5 pagineQuestion Bank - 2131004 - DE - New - 11082016 - 075548AMRutvik JaniNessuna valutazione finora
- CS - ECE - EEE - INSTR F215 Digital Design Handout I Sem 2023-24Documento3 pagineCS - ECE - EEE - INSTR F215 Digital Design Handout I Sem 2023-24Deepti MishraNessuna valutazione finora
- Phy340-Tutorial 2Documento2 paginePhy340-Tutorial 2sabellaemellea16Nessuna valutazione finora
- Distance Relay D60Documento630 pagineDistance Relay D60nadalllabeedNessuna valutazione finora
- 1MRK505396-BEN A en Product Guide Line Differential Protection RED650 Version 2.2Documento90 pagine1MRK505396-BEN A en Product Guide Line Differential Protection RED650 Version 2.2Pavel DobiasNessuna valutazione finora
- Mil HDBK 217fn1Documento37 pagineMil HDBK 217fn1Pradeep BhagwatNessuna valutazione finora
- Boardworks Cambridge IGCSE Mapping Grid PhysDocumento15 pagineBoardworks Cambridge IGCSE Mapping Grid PhysengrroyNessuna valutazione finora
- Chapter 3 Logic GatesDocumento7 pagineChapter 3 Logic GatesYou Are Not Wasting TIME Here33% (3)
- Digital Logic Design: Tanzilur Rahman (TNR) Assistant Professor North South UniversityDocumento18 pagineDigital Logic Design: Tanzilur Rahman (TNR) Assistant Professor North South UniversityBarnardoNessuna valutazione finora
- Digital Circuit Work Book F1Documento33 pagineDigital Circuit Work Book F1swaransh patelNessuna valutazione finora
- ITSyllabusVersion2 0Documento152 pagineITSyllabusVersion2 0Ganesh NandgaonkarNessuna valutazione finora
- Hsslive-9. Solids and SemiconductorsDocumento10 pagineHsslive-9. Solids and SemiconductorsRishikesh CRNessuna valutazione finora
- Basic Vlsi Design ContentsDocumento6 pagineBasic Vlsi Design ContentsrdnanduNessuna valutazione finora
- Video Audio Wireless Transmitter Project For YouDocumento38 pagineVideo Audio Wireless Transmitter Project For YouAnnu JaiswalNessuna valutazione finora
- PLC Based Load Sharing ReportDocumento15 paginePLC Based Load Sharing ReportPravin Gareta83% (6)
- Antipona, Clarence A. - Chapter 5-1, 5-2, 5-3 SummaryDocumento3 pagineAntipona, Clarence A. - Chapter 5-1, 5-2, 5-3 Summaryclarence antiponaNessuna valutazione finora
- Chapter 14Documento23 pagineChapter 14Christina josephine malathiNessuna valutazione finora