Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Experimental PWM Method Validation of A 9-Level 4.16 KV Series Connected H-Bridge Grid SimulatorDocumento6 pagineExperimental PWM Method Validation of A 9-Level 4.16 KV Series Connected H-Bridge Grid SimulatorRoopa ReddyNessuna valutazione finora
- Rating of The Circuit BreakersDocumento19 pagineRating of The Circuit BreakersRoopa ReddyNessuna valutazione finora
- Unit - 1: Switches and FusesDocumento3 pagineUnit - 1: Switches and FusesRoopa ReddyNessuna valutazione finora
- Unit IDocumento23 pagineUnit IRoopa ReddyNessuna valutazione finora
- Unit VDocumento23 pagineUnit VRoopa ReddyNessuna valutazione finora
- Unit - 1: Switches and FusesDocumento3 pagineUnit - 1: Switches and FusesRoopa ReddyNessuna valutazione finora
- EMS U 1 Part 2Documento25 pagineEMS U 1 Part 2Roopa ReddyNessuna valutazione finora
- Preamble:: Laboratory Manual Electrical MeasurmentDocumento57 paginePreamble:: Laboratory Manual Electrical MeasurmentRoopa ReddyNessuna valutazione finora
- After Completing This Course The Student Must Demonstrate The Knowledge and Ability ToDocumento2 pagineAfter Completing This Course The Student Must Demonstrate The Knowledge and Ability ToRoopa ReddyNessuna valutazione finora
- Unit - I Economic Load DispatchDocumento36 pagineUnit - I Economic Load DispatchRoopa Reddy100% (1)
- 14-15 PEED Comprehensive VivaDocumento1 pagina14-15 PEED Comprehensive VivaRoopa ReddyNessuna valutazione finora
- Handbook 2014 - 15 EEE Department-IV Year I SemDocumento55 pagineHandbook 2014 - 15 EEE Department-IV Year I SemRoopa ReddyNessuna valutazione finora
- Multi Functional DVRDocumento9 pagineMulti Functional DVRRoopa ReddyNessuna valutazione finora
- Lecture1423813026 PDFDocumento92 pagineLecture1423813026 PDFKarthikeyanKarunNessuna valutazione finora
- R15-II, III & IV-eee Syllubi 18-6-2016Documento3 pagineR15-II, III & IV-eee Syllubi 18-6-2016Roopa ReddyNessuna valutazione finora
- DbmsDocumento2 pagineDbmsRoopa ReddyNessuna valutazione finora
- Preamble:: Laboratory Manual Electrical MeasurmentDocumento57 paginePreamble:: Laboratory Manual Electrical MeasurmentRoopa ReddyNessuna valutazione finora
- Reference Books List by Made EasyDocumento3 pagineReference Books List by Made EasyRoopa ReddyNessuna valutazione finora
- Bee DC Machines ProblemsDocumento1 paginaBee DC Machines ProblemsRoopa ReddyNessuna valutazione finora
- Modeling of Power SystemDocumento3 pagineModeling of Power SystemRoopa ReddyNessuna valutazione finora
- Bloom's Taxonomy of Measurable VerbsDocumento2 pagineBloom's Taxonomy of Measurable Verbsbidyutgogoi100% (3)
- 01 02 04 22 (Hazop)Documento5 pagine01 02 04 22 (Hazop)David MacatangayNessuna valutazione finora
- PLC Lab ExeercisesDocumento73 paginePLC Lab Exeercisesmanicks369601Nessuna valutazione finora
- Switchgear Notes PDFDocumento134 pagineSwitchgear Notes PDFGorla RamuNessuna valutazione finora
- DC Generator PDFDocumento108 pagineDC Generator PDFSaeed Osman MohamedNessuna valutazione finora
- Brushless DC (BLDC) Motor FundamentalsDocumento20 pagineBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- L10 Single Phase Fully Controlled RectifierDocumento26 pagineL10 Single Phase Fully Controlled Rectifierapi-1995170750% (2)
- Final Ibps Po Mains Capsule 20153 PDFDocumento71 pagineFinal Ibps Po Mains Capsule 20153 PDFRyan WootenNessuna valutazione finora
- TT - Electronics 898 3 R100K Datasheet PDFDocumento4 pagineTT - Electronics 898 3 R100K Datasheet PDFelnegritoheberNessuna valutazione finora
- Control of Vibration and Resonance in Aero Engines and Rotating Machinery - An OverviewDocumento7 pagineControl of Vibration and Resonance in Aero Engines and Rotating Machinery - An OverviewpeaceshadyNessuna valutazione finora
- Current ElecDocumento56 pagineCurrent Elecsuresh_tNessuna valutazione finora
- Force and AccelerationDocumento26 pagineForce and AccelerationRian Dale Cadiente MalazzabNessuna valutazione finora
- Types of DTRDocumento78 pagineTypes of DTRraja471100% (1)
- Accu Icr18650 2.2 PDFDocumento8 pagineAccu Icr18650 2.2 PDFNaciu CatalinNessuna valutazione finora
- Section - 12 RHEOLOGY AND HYDRAULICSDocumento8 pagineSection - 12 RHEOLOGY AND HYDRAULICSIbrahim DewaliNessuna valutazione finora
- Physics 121: Electricity & Magnetism - Lecture 3 Electric FieldDocumento22 paginePhysics 121: Electricity & Magnetism - Lecture 3 Electric FieldDilini WijesinghNessuna valutazione finora
- Building Electrical Materials and EquipmentDocumento20 pagineBuilding Electrical Materials and EquipmentDon RoyNessuna valutazione finora
- Atmospheric Water GeneratorDocumento9 pagineAtmospheric Water GeneratorIJRASETPublicationsNessuna valutazione finora
- FM Module 3 ProbsDocumento11 pagineFM Module 3 Probsyogesh shinde100% (1)
- Quantum Physics Short NotesDocumento2 pagineQuantum Physics Short NotesMyName One999Nessuna valutazione finora
- Properties of Saturated Steam - Pressure in BarDocumento6 pagineProperties of Saturated Steam - Pressure in Barmanpreetsodhi08Nessuna valutazione finora
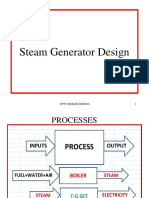
- Steam Generator DesignDocumento147 pagineSteam Generator Designzerocool86100% (1)
- Using The Mobile Substations in 132Kv Network and Studying Their Effects On The Losses of NetworkDocumento4 pagineUsing The Mobile Substations in 132Kv Network and Studying Their Effects On The Losses of NetworkSudhir RavipudiNessuna valutazione finora
- Bitumen SpecificationsDocumento2 pagineBitumen SpecificationsAlexander IvanovNessuna valutazione finora
- Declination Angle - PVEducationDocumento5 pagineDeclination Angle - PVEducationSWATHINessuna valutazione finora
- PT - Handa Energi Investasi Indonesia ProfileDocumento3 paginePT - Handa Energi Investasi Indonesia ProfilemasterdokumenhandaNessuna valutazione finora
- GATE-2014 Electrical MeasurementsDocumento42 pagineGATE-2014 Electrical MeasurementsRamaDinakaran100% (1)
- Short Lab Report SheetDocumento3 pagineShort Lab Report SheetDharmaalManieNessuna valutazione finora
- Steam TablesDocumento20 pagineSteam TablesFenny PutriNessuna valutazione finora
- 4.2 Entropy Session 3Documento40 pagine4.2 Entropy Session 3Chanti ChaithanyaNessuna valutazione finora
- Maths Guru: B-242, DDA FLATS BINDAPUR ND-59.MOB:9818322670, EmailDocumento2 pagineMaths Guru: B-242, DDA FLATS BINDAPUR ND-59.MOB:9818322670, Emailsanjay kumarNessuna valutazione finora
- Ohmite Component Selector: Catalog 4000KDocumento205 pagineOhmite Component Selector: Catalog 4000Klem abesamisNessuna valutazione finora
- 01 Variable LoadDocumento11 pagine01 Variable LoadPaul CamuNessuna valutazione finora
- Chapter 01 PDFDocumento27 pagineChapter 01 PDFRahayu Riandika PutriNessuna valutazione finora
- Assignment 1Documento2 pagineAssignment 1Fredrik UlvinNessuna valutazione finora
- Effect of PCM On Temperature Fluctuation During The Door Opening of A Household RefrigeratorDocumento22 pagineEffect of PCM On Temperature Fluctuation During The Door Opening of A Household RefrigeratorWalton Science Research LabNessuna valutazione finora
- 9702-P1 WavesDocumento41 pagine9702-P1 WavesZubair AhmadNessuna valutazione finora
- Copeland Refrigeration Manual - Part 3 - The Refrigeration LoadDocumento44 pagineCopeland Refrigeration Manual - Part 3 - The Refrigeration LoadMohammad Amer100% (3)