IJSTE - International Journal of Science Technology & Engineering | Volume 2 | Issue 10 | April 2016
ISSN (online): 2349-784X
Fuzzy Based Indoor Navigation System for
Physically Disabled
Uma. S.
Department of Electronics & Electrical Engineering
College of Engineering, Guindy, Anna University, Chennai,
India
Gnanamani Sapientia. M.
Department of Electronics & Electrical Engineering
College of Engineering, Guindy, Anna University,
Chennai, India
Abstract
This paper develops a system to aid people who are physically challenged with leg impairment to navigate indoor with ease. It also
aims to provide the traditional powered wheelchair with added features provided with low cost design. The system is divided into
2 units. First part consists of sensors and direction inputs which are interfaced with motors through microcontroller. The obstacle
avoidance scheme is developed based on fuzzy algorithm to prevent accidents. The wheelchair is operated by two DC motors. The
direction keys are used to change the direction of the wheelchair. The other part consists of Bluetooth module connected to
microcontroller to control domestic electronic devices. An android app is built for user interface. Using Relay, we can switch
ON/OFF the electronic devices.
Keywords: Fuzzy, Home Automation, Bluetooth, Zigbee, Control Algorithms
________________________________________________________________________________________________________
I.
INTRODUCTION
The people who are suffering with motion impairment problem, chooses an artificial means of locomotion, like wheelchair. The
intelligent wheelchair helps the handicapped and elderly people to live independently in home. But the cost of individual health
care is more expensive. Considering the people with medium and low income to afford such services with basic features is the
main idea of this paper.
The main goal is to develop a wheelchair with autonomous navigation in an unknown environment without hitting any object.
In ancient days wheelchair are self-propelled controlled by users hand rim and electrical power assisted controlled by electric
motors on both wheels. The evolution of technology made the electric powered wheelchair controlled by driving commands
(velocity and direction) through joystick and voice [1]. This paper deals with an electric powered assisted wheelchair with joystick
to control the direction of the wheels. The wheelchair controlled with two DC motors. The controller operates these DC motors
and controls the wheelchair accordingly.
The navigation is performed based on sensor information, behavior based or sensor based approach is analyzed. In which the
wheelchair is derived by direct mapping between sensors and motors. The implementation of fuzzy based reactive control for the
motion of two wheels in an unknown indoor environment with obstacle is performed. The fuzzy driving direction is determined
by the fuzzy rules /algorithm based on the information provided by the joystick and distance to the obstacle measured by the
ultrasonic sensor [1].
To avoid the problem of elderly people to approach the switch to ON/OFF the device, a home automation is provided. The home
automation is achieved through various technologies. This paper adopts the Bluetooth technology, Zigbee for home automation.
The command is given by user from android applications (smart phone) to microcontroller via Bluetooth [2]. The control App to
board connectivity is in Bluetooth and the home automation part of the App is done in Zigbee for longer range.
II. RELATED WORKS
Autonomous navigation of the wheelchair in an uncertain situation is difficult task. To discover the optimal path for the navigation,
various methodologies like Road map building, artificial field potential, fuzzy logic controller, neural networks, genetic algorithms
have been proposed based on both classical and reactive method [3]. They present a free intelligent navigation FIN algorithm
which has two main stages. The first stage is the sub-fuzzy set model uses the proper fuzzy set to find the shortest distance. The
second stage generates the navigation of the vehicle according to the output of first stage.IR sensor and ultrasonic sensors are used
for the obstacle detection and distance measure from the vehicle and obstacle, this measurement is used to find the shortest distance
from the obstacle and take desired decision to reach target. The curve fitting method is used to create a map of unknown
environment based on sensed data. Fuzzy sensor fusion and curve approximation. The ultrasonic sensor and infrared sensor are
used to discover the unknown environment [4].
[5] proposed a logic called Type-2 fuzzy logic applied to better accuracy and smoothness which also provides additional degree
of freedom to handle uncertainties. The main core of this logic is to design the fusion controller to compensate our lack of
information. The controller calculates both linear and angular velocities of the robot in order to separate the distance and angle
between the target and obstacle. Membership function of fuzzy algorithm is optimized in genetic algorithm. When the obstacle is
All rights reserved by www.ijste.org
890
Fuzzy Based Indoor Navigation System for Physically Disabled
(IJSTE/ Volume 2 / Issue 10 / 160)
detected too close wall following method is activated. The angle compensation method is designed to overcome the deadlock
problem in Ran Zhao experiment. The experiment was tested in MATLAB [6]. Path planning of autonomous robot using fuzzy
logics to avoid obstacle of different shapes in workspace environment as a simulation was done in MATLAB Fuzzy tool box and
analyzed by [7]. [8] suggested Goal seeking fuzzy logic controller (GSFLC) and Fuzzy Logic for Obstacle Avoidance(FLOA) both
work concurrently for the navigation.
Look up table (LUT) based fuzzy system was addressed by [9] to improve the processing speed of a fuzzy obstacle. P/N rule
fuzzy controller, in which positive rule direct the robot to a target and negative rules avoid from colliding with obstacles. The basic
idea is to reduce the processing speed, is to store all membership function data in LUTs in advance and search for membership
degrees in LUTs. [10] developed a solution based on XScale embedded platform and real-time embedded Linux. For collision free
navigation laser range finder and artificial field potential (APF) approach are used. People appreciate the wireless life style. With
the help of never ending evolution of technologies we can built various product according the convenience of consumers [11].
Latha and her team developed a home automation system based on cloud server interfaced using ardunio an android app was
created for user command[12].
Raspberry-Pi card - Nano computer card with ARM processor was experimented with wed sever by Hayetusing android app as
user interface[13] Security system for home main entrance, car door, and domestic appliances was designed using PIC
Microcontroller and Bluetooth technology by Sadeque[14]. On analyzing a various methodology this paper deals with the idea to
build a wheelchair with obstacle avoidance algorithm based on fuzzy and to create an android app for home automation using
zigbee. The microcontroller named NUC140VE3CN, which is a 32-bit microcontroller with embedded ARM cortex with rich
communication interfaces is used to implement the proposed system.
III. IMPLEMENTATION
Control System for Navigation
The idea for control system for indoor navigation deals with setup of wheelchair with obstacle avoidance scheme. The relationship
between the input and output variable is defined by Fuzzy Inference System(FIS).The input is composed of multiple variable like
left senor distance, front sensor distance, right sensor distance. In similar way the output is composed of multiple variables like
right motor direction and left motor direction. One of the fundamental necessity in navigation is path planning. The path planning
has to be designed with care to overcome the obstacle from starting point to destination point.
The collision free path planning is achieved by fuzzy logic based obstacle avoidance and navigation scheme. The application of
the FIS to the user defined membership functions has been adopted with three inputs and two outputs along with two membership
function for each input. The three inputs are the distance from the vehicle and the obstacle provided by ultrasonic sensors placed
left, front, right [14] as represented in figure 1. The ultrasonic sensor ranges from 1cm to 4m. Many researchers have taken up
fuzzy algorithm in robot navigation. Because for real time application fuzzy controller is more suitable. They provide simpler and
more spontaneous method for collision free path planning.
The locomotion of the systems is based on two DC motors positioned at the different sides of the wheels (left and right). The
direction of the motors control independently so that they can take a smooth turns in desired direction. The direction changes in
order to have collision free path planning depends on the sensor values, which is provided by three ultrasonic sensor placed at left,
right and front sides of the vehicle.
Fig. 1: Wheel chair model
Home Automation System
Electronic and Electrical environment includes fans, lighting system, air conditioner, motor, heater etc Remotely accessing and
controlling the electronic appliances includes android application and web application. There are wide range of options are
convenient for home automation system for example Phone based, Wireless control system, Bluetooth, ZigBee and GSM. In this
All rights reserved by www.ijste.org
891
Fuzzy Based Indoor Navigation System for Physically Disabled
(IJSTE/ Volume 2 / Issue 10 / 160)
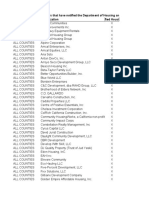
paper the fusion of Bluetooth and Zigbee are applied. The command is given by user from android applications (smart phone) to
microcontroller via Bluetooth. The controller then transfers the command from remote unit through Zigbee which enables the user
to switch ON/OFF the devices.
Fig. 2: Block diagram for home automation system
Fuzzy logic Implementation
Obstacle avoidance is the main requirement in autonomous navigation. Both the navigation and obstacle avoidance can be handled
well with the Fuzzy controller. Fuzzy logic based system has the advantage that it admits the perspective nature of sensor based
navigation. The defuzzification is done through Centroid method. Once the obstacle and the distance of the obstacle were
encountered a collision free path can be created [1]. In times of obstacles the wheelchair would take its left or right turn based on
the set of fuzzy rules. However, the result of these rules would not be the velocities applied to the robot motors, but a set of degrees
of membership [14].
As shown in the figure 3 and figure 4 the type of the plot in the membership function is chosen to be Gaussian because it is
essential to achieve smoothness in motion. In order to reduce the complexity only two membership functions are considered for
each sensor input. The two membership functions correspond to input is named to be near and far. They are ranged as 0 - 1.5(near)m
and 1.5 - 4(far)m. The two membership functions correspond to the output is named as Forward and Reverse. To check the
output of the simulation the membership function output was verified for the range as 0-30 for forward action of motor and 30-60
for reverse.
Fig. 3: Membership function for input variables
All rights reserved by www.ijste.org
892
Fuzzy Based Indoor Navigation System for Physically Disabled
(IJSTE/ Volume 2 / Issue 10 / 160)
Fig. 4: Membership function for output variables
It is quite difficult to control the movement of the wheels independently. Fuzzy commands used to control the left and right
wheels are forward, reverse and stop to turn left the left motor should be in reverse direction and right motor should be in forward
direction. These fuzzy control rules for avoiding collision are given in the Table 1 as taken from [15].
Table 1
Fuzzy Rules for Obstacle Avoidance
L.S
F.S
R.S
L.M
R.M
FAR
FAR
FAR
FWD
REV
FAR
FAR
NEAR
REV
FWD
FAR
NEAR
NEAR
REV
FWD
FAR
NEAR
FAR
FWD
REV
NEAR
NEAR
FAR
FWD
REV
NEAR
NEAR
NEAR
REV
REV
NEAR
FAR
NEAR
FWD
REV
NEAR
FAR
FAR
FWD
REV
IV. RESULT AND ANALYSIS
The correctness of the fuzzy rules are verified using fuzzy Simulink Tool Box. The Sensor values are manually given and analyzed
for every condition. For example as shown in Figure 5 the constant, constant1, constant2 corresponds to the input sensor values
L.S=2(FAR) F.S=2.5(FAR) R.S=1(NEAR). Which means when the left sensor reads 2 and the front sensor reads 2.5 and the right
sensor reads 1, the corresponding outputs are verified using scope.
All rights reserved by www.ijste.org
893
Fuzzy Based Indoor Navigation System for Physically Disabled
(IJSTE/ Volume 2 / Issue 10 / 160)
Fig. 5: Simulation block for fuzzy condition
According to the condition the output should be L.M=REVERSE which should range from 30-60 which is displayed in the
figure. 6.1 R.M=FORWARD should range from 0-30 which is displayed in figure 6.2.
Fig. 6.1: The simulation output for left motor
Fig. 6.2: The simulation output for right motor
Verification in real time was done by building prototype of wheelchair as in figure 7.
All rights reserved by www.ijste.org
894
Fuzzy Based Indoor Navigation System for Physically Disabled
(IJSTE/ Volume 2 / Issue 10 / 160)
Fig. 7: Prototype for wheelchair
V. CONCLUSION
This paper has attempted to develop a wheelchair operated by joystick with obstacle avoidance algorithm based on fuzzy logic and
a home automation system controlled using Bluetooth technology which is yet to be implemented. The proposed control system is
capable of achieving collision free and smooth navigation. The experiment is tested using the prototype in an indoor environment
to verify the efficiency of the algorithm. Our future work is to increase the efficiency of the algorithm so that it can make the
navigation safer and suitable for outdoor.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
Hiroki Murakami and Hirokazu Seki, Fuzzy Algorithm Based Obstacle Avoidance Control of Electric Powered Wheelchair using Ultrasonic Sensor
International conference on Industrial Electronics IEEE Porto, 2009.
R.A.Ramlee et.al Bluetooth Remote Home Automation System Using Android Application The International Journal of Engineering And Science, Volume
2 ,Issue 01, pp. 149-153, 2013.
Amir Shahzad, Rami Al-Jarrah, and Hubert Roth Teleportation of AutoMerlin by inculcating FIN algorithm Journal of Mechanical Engineering and
Robotics Research, Volume 5, No. 1, pp. 1-5, 2016.
J.G.Juang, and Y.C.Yang, Fuzzy sensor fusion and curve approximation for indoor map building proc. Of International conference on Artificial Intelligence
and Industrial Engineering, pp. 554-557, May 2015.
Mouloud IDER, and Boubekeur MENDIL, Type-2 fuzzy logic control for a mobile robot tracking a moving target Mediterranean Journal of Modelling and
Simulation, pp. 057-065, March2015.
Ran Zhao, Dong Hwan Lee, and Hong Kyu Lee, Mobile Robot Navigation using Optimized Fuzzy Controller by Genetic Algorithm International Journal
of Fuzzy Logic and Intelligent Systems, Volume 15, No. 1, pp. 12-19, March 2015.
Hedjar Ramdane, Mohammed Faisal, Mohammed Algabri, and Khalid Al-Mutib Mobile Robot Navigation with Obstacle Avoidance in Unknown Indoor
Environment using MATLAB International Journal of Computer Science and Network, Volume 2, Issue 6, pp. 25-31,2013.
Jinwook Kim, Yoon-Gu Kim, and Jinung An, A Fuzzy Obstacle Avoidance Controller Using a Lookup-Table Sharing Method and Its Applications for
Mobile Robots International Journal of Advanced Robotic Systems, Vol. 8, No. 5, pp. 39-48,2011.
Chung-Hsien Kuo, Yao-Sheng Syu, Tsung-Chin Tsai and Ting-Shuo Chen, An Embedded Robotic Wheelchair Control Architecture with Reactive
Navigations IEEE International Conference on Automation Science and Engineering, Italy 2011.
R.Piyare, and M.Tazil, Bluetooth based Home Automation System using Cell Phone IEEE International Symposium on Consumer Electronics, Fiji 2011.
Latha A.P, Prathik Agarwal, RishadhRAjgarhia, Shashank and Nafiya, Home Automation Using Android Application and Predictive Behavior
Implementation International Journal of Engineering and Techniques, Volume 1 Issue 3, pp. 49-53, 2015.
Hayet Lamine and Hafedh Abid, Remote control of domestic equipment from an Android application based on Raspberry pi card International conference
on Sciences and Techniques of Automatic control & computer engineering IEEE Tunisa December 2014.
Sadeque Reza Khan and Farzana Sultana Dristy, Arduino based security and home automation system International Journal for Ambient System and
Applications, International Journal of Ambient Systems and Applications, Vol.3, No.1, pp. 15-24, 2015.
Anish Pandey, Rakesh Kumar Sonkar, Krishna Kant Pandey and D. R. Parhi, Path Planning Navigation of Mobile Robot with Obstacles Avoidance Using
Fuzzy Logic Controller International Conference on Intelligent System Control IEEE, Coimbatore, 2014.
C. G. Rusu and T. Birou, Obstacle Avoidance Fuzzy System for Mobile Robot with IR Sensors International Conference on development and Application
Systems, Romania, May 27-29,pp. 25-29 2010.
Marwah Almasri , Khaled Elleithy and Abrar Alajlan ,Sensor Fusion Based Model for Collision Free Mobile Robot Navigation MDPI Journals, Sensors,
pp. 1- 24, 2016.
[17]
[18] Satish Palaniappan et.al, Home Automation Systems - A Study,International Journal of Computer Applications,Volume 116 No. 11, pp. 11-18, April
2015.
[19] Wu Wei, Ma Xiaoning and Gao Xiuyu, The Application of Fuzzy PID Control in Intelligent Wheelchair System IEEE of second Global Congress on
Intelligent Systems, Wuhan, 2010.
[20] Wijetunge S.P., Wijetunge U.S., Peiris G.R.V.,Aluthgedara C.S, Samarasinghe A.T.L.K., Design and Implementation of a Bluetooth based General Purpose
Controlling Module IEEE Conference on Information and Automation for Sustainability, Colombo, 2008.
All rights reserved by www.ijste.org
895
Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Study For 33KV Sub-Marine Cable Crossings PDFDocumento80 pagineStudy For 33KV Sub-Marine Cable Crossings PDFOGBONNAYA MARTINSNessuna valutazione finora
- Data MiningDocumento721 pagineData MiningAuly Natijatul AinNessuna valutazione finora
- DTDC Rate Quotation-4Documento3 pagineDTDC Rate Quotation-4Ujjwal Sen100% (1)
- Optimization of Overall Efficiency Using Facilities Planning in Ropp Cap Making IndustryDocumento8 pagineOptimization of Overall Efficiency Using Facilities Planning in Ropp Cap Making IndustryIJSTENessuna valutazione finora
- Partial Replacement of Fine Aggregate With Iron Ore Tailings and Glass PowderDocumento7 paginePartial Replacement of Fine Aggregate With Iron Ore Tailings and Glass PowderIJSTENessuna valutazione finora
- Automatic Generation Control in Three-Area Power System Operation by Using "Particle Swarm Optimization Technique"Documento8 pagineAutomatic Generation Control in Three-Area Power System Operation by Using "Particle Swarm Optimization Technique"IJSTENessuna valutazione finora
- Design and Analysis of Magneto Repulsive Wind TurbineDocumento7 pagineDesign and Analysis of Magneto Repulsive Wind TurbineIJSTENessuna valutazione finora
- FPGA Implementation of High Speed Floating Point Mutliplier Using Log Based DesignDocumento4 pagineFPGA Implementation of High Speed Floating Point Mutliplier Using Log Based DesignIJSTENessuna valutazione finora
- Multipurpose Scheme of Workshop Exhaust System For Ventilation and Electrical Power GenerationDocumento9 pagineMultipurpose Scheme of Workshop Exhaust System For Ventilation and Electrical Power GenerationIJSTENessuna valutazione finora
- RFID Based Toll Gate AccessDocumento5 pagineRFID Based Toll Gate AccessIJSTENessuna valutazione finora
- A Cloud Based Healthcare Services For Remote PlacesDocumento4 pagineA Cloud Based Healthcare Services For Remote PlacesIJSTENessuna valutazione finora
- Effect of RIB Orientation in Isogrid Structures: Aerospace ApplicationsDocumento9 pagineEffect of RIB Orientation in Isogrid Structures: Aerospace ApplicationsIJSTENessuna valutazione finora
- Optimization of Treatability by FACCO For Treatment of Chemical Industry EffluentDocumento9 pagineOptimization of Treatability by FACCO For Treatment of Chemical Industry EffluentIJSTENessuna valutazione finora
- A Mixture of Experts Model For ExtubationDocumento4 pagineA Mixture of Experts Model For ExtubationIJSTENessuna valutazione finora
- A Comprehensive Survey of Techniques/Methods For Content Based Image Retrieval SystemDocumento6 pagineA Comprehensive Survey of Techniques/Methods For Content Based Image Retrieval SystemIJSTENessuna valutazione finora
- Development of Relationship Between Saturation Flow and Capacity of Mid Block Section of Urban Road - A Case Study of Ahmedabad CityDocumento6 pagineDevelopment of Relationship Between Saturation Flow and Capacity of Mid Block Section of Urban Road - A Case Study of Ahmedabad CityIJSTENessuna valutazione finora
- The Bicycle As A Mode Choice - A Gendered ApproachDocumento4 pagineThe Bicycle As A Mode Choice - A Gendered ApproachIJSTENessuna valutazione finora
- Enriching Gum Disease Prediction Using Machine LearningDocumento6 pagineEnriching Gum Disease Prediction Using Machine LearningIJSTENessuna valutazione finora
- A Radar Target Generator For Airborne TargetsDocumento8 pagineA Radar Target Generator For Airborne TargetsIJSTENessuna valutazione finora
- Onerider The Bike TaxiDocumento3 pagineOnerider The Bike TaxiIJSTENessuna valutazione finora
- Optimum Placement of DG Units Using CPF MethodDocumento6 pagineOptimum Placement of DG Units Using CPF MethodIJSTENessuna valutazione finora
- Comparative Study and Analysis of PCC Beam and Reinforced Concrete Beam Using GeogridDocumento7 pagineComparative Study and Analysis of PCC Beam and Reinforced Concrete Beam Using GeogridIJSTENessuna valutazione finora
- An Implementation and Design A Customized Advanced Image Editor Using Image Processing in MatlabDocumento5 pagineAn Implementation and Design A Customized Advanced Image Editor Using Image Processing in MatlabIJSTENessuna valutazione finora
- App-Based Water Tanker Booking, Monitoring & Controlling SystemDocumento6 pagineApp-Based Water Tanker Booking, Monitoring & Controlling SystemIJSTENessuna valutazione finora
- Optimizing Turning Process For EN43 by Taguchi Method Under Various Machining ParametersDocumento4 pagineOptimizing Turning Process For EN43 by Taguchi Method Under Various Machining ParametersIJSTENessuna valutazione finora
- Wireless Information Process and Power Transfer in Single-User OFDM SystemDocumento6 pagineWireless Information Process and Power Transfer in Single-User OFDM SystemIJSTENessuna valutazione finora
- Interstage Construction Techniques For Mass Gain: An OverviewDocumento5 pagineInterstage Construction Techniques For Mass Gain: An OverviewIJSTENessuna valutazione finora
- Using The Touch-Screen Images For Password-Based Authentication of IlliteratesDocumento6 pagineUsing The Touch-Screen Images For Password-Based Authentication of IlliteratesIJSTENessuna valutazione finora
- Duplicate Detection Using AlgorithmsDocumento3 pagineDuplicate Detection Using AlgorithmsIJSTENessuna valutazione finora
- Research On Storage Privacy Via Black Box and Sanitizable SignatureDocumento6 pagineResearch On Storage Privacy Via Black Box and Sanitizable SignatureIJSTENessuna valutazione finora
- Technology Advancement For Abled PersonDocumento9 pagineTechnology Advancement For Abled PersonIJSTENessuna valutazione finora
- An Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemDocumento5 pagineAn Implementation of Maximum Power Point Tracking Algorithms For Photovoltaic Systems Using Matlab and Arduino Based RTOS SystemIJSTENessuna valutazione finora
- KL1508 KL1516: 8/16-Port Cat 5 High-Density Dual Rail LCD KVM SwitchDocumento5 pagineKL1508 KL1516: 8/16-Port Cat 5 High-Density Dual Rail LCD KVM SwitchnisarahmedgfecNessuna valutazione finora
- Br2e Int Readingfile10 PDFDocumento2 pagineBr2e Int Readingfile10 PDFSanti RodriguezNessuna valutazione finora
- Cam 12 Test 2 ReadingDocumento7 pagineCam 12 Test 2 ReadingLê Nguyễn Ái DuyênNessuna valutazione finora
- Longley Rice PropagationDocumento11 pagineLongley Rice Propagationy_m_algbaliNessuna valutazione finora
- Application Form-Nguyen Huy CuongDocumento4 pagineApplication Form-Nguyen Huy Cuongapi-3798114Nessuna valutazione finora
- Maverick Research: World Order 2.0: The Birth of Virtual NationsDocumento9 pagineMaverick Research: World Order 2.0: The Birth of Virtual NationsСергей КолосовNessuna valutazione finora
- Indian Consumer - Goldman Sachs ReportDocumento22 pagineIndian Consumer - Goldman Sachs Reporthvsboua100% (1)
- Stryker Endoscopy SDC Pro 2 DVDDocumento2 pagineStryker Endoscopy SDC Pro 2 DVDWillemNessuna valutazione finora
- Reterta V MoresDocumento13 pagineReterta V MoresRam Migue SaintNessuna valutazione finora
- Chapter 10 Outline PDFDocumento2 pagineChapter 10 Outline PDFjanellennuiNessuna valutazione finora
- A88438-23 Critical Procedure 11-01 - Pipeline Cut Outs - A5X9W9Documento7 pagineA88438-23 Critical Procedure 11-01 - Pipeline Cut Outs - A5X9W9mahmoudNessuna valutazione finora
- Joseph J. Fiumara v. Fireman's Fund Insurance Companies, 746 F.2d 87, 1st Cir. (1984)Documento7 pagineJoseph J. Fiumara v. Fireman's Fund Insurance Companies, 746 F.2d 87, 1st Cir. (1984)Scribd Government DocsNessuna valutazione finora
- Ex 6 Duo - 2021 Open-Macroeconomics Basic Concepts: Part 1: Multple ChoicesDocumento6 pagineEx 6 Duo - 2021 Open-Macroeconomics Basic Concepts: Part 1: Multple ChoicesTuyền Lý Thị LamNessuna valutazione finora
- Ab 1486 Developer Interest ListDocumento84 pagineAb 1486 Developer Interest ListPrajwal DSNessuna valutazione finora
- Payment Systems Worldwide: Appendix Country-by-Country AnswersDocumento306 paginePayment Systems Worldwide: Appendix Country-by-Country Answersravinewatia27Nessuna valutazione finora
- Digitalisasi Alquran-1 PDFDocumento40 pagineDigitalisasi Alquran-1 PDFMohammad Zildan Pasyha MNessuna valutazione finora
- Eastern Bank Limited: Name: ID: American International University of Bangladesh Course Name: Faculty Name: Due DateDocumento6 pagineEastern Bank Limited: Name: ID: American International University of Bangladesh Course Name: Faculty Name: Due DateTasheen MahabubNessuna valutazione finora
- Danais 150 ActuadoresDocumento28 pagineDanais 150 Actuadoresedark2009Nessuna valutazione finora
- CERES News Digest - Week 11, Vol.4, March 31-April 4Documento6 pagineCERES News Digest - Week 11, Vol.4, March 31-April 4Center for Eurasian, Russian and East European StudiesNessuna valutazione finora
- Alfa Laval Plate Heat Exchangers: A Product Catalogue For Comfort Heating and CoolingDocumento8 pagineAlfa Laval Plate Heat Exchangers: A Product Catalogue For Comfort Heating and CoolingvictoryanezNessuna valutazione finora
- Book Notes Covering: Andy Kirk's Book, Data Visualization - A Successful Design ProcessDocumento10 pagineBook Notes Covering: Andy Kirk's Book, Data Visualization - A Successful Design ProcessDataVersed100% (1)
- General Electric/ Massachusetts State Records Request Response Part 3Documento673 pagineGeneral Electric/ Massachusetts State Records Request Response Part 3Gintautas DumciusNessuna valutazione finora
- Burberry Annual Report 2019-20 PDFDocumento277 pagineBurberry Annual Report 2019-20 PDFSatya PhaneendraNessuna valutazione finora
- Kudla Vs PolandDocumento4 pagineKudla Vs PolandTony TopacioNessuna valutazione finora
- Engineering Materials-Istanbul .Technical UniversityDocumento40 pagineEngineering Materials-Istanbul .Technical UniversitybuggrraaNessuna valutazione finora
- TM9-238 Deepwater Fording of Ordnance Materiel PDFDocumento35 pagineTM9-238 Deepwater Fording of Ordnance Materiel PDFdieudecafeNessuna valutazione finora
- Top Ten Helicopter Checkride TipsDocumento35 pagineTop Ten Helicopter Checkride TipsAbhiraj Singh SandhuNessuna valutazione finora