Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Salem-Campus, Attur Main Road, Minnampalli, Salem - 636 106.: Mahendra College of EngineeringDocumento4 pagineSalem-Campus, Attur Main Road, Minnampalli, Salem - 636 106.: Mahendra College of EngineeringAnonymous Ndsvh2soNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- College of EngineeringDocumento40 pagineCollege of EngineeringAnonymous Ndsvh2soNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Salem-Campus, Attur Main Road, Minnampalli, Salem - 636 106.: Mahendra College of EngineeringDocumento2 pagineSalem-Campus, Attur Main Road, Minnampalli, Salem - 636 106.: Mahendra College of EngineeringAnonymous Ndsvh2soNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Ec 6651 Communicationengineeringunit 5Documento94 pagineEc 6651 Communicationengineeringunit 5Anonymous Ndsvh2soNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Salem-Campus, Attur Main Road, Minnampalli, Salem - 636 106.: Mahendra College of EngineeringDocumento2 pagineSalem-Campus, Attur Main Road, Minnampalli, Salem - 636 106.: Mahendra College of EngineeringAnonymous Ndsvh2soNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- University Question Bank - CTDocumento25 pagineUniversity Question Bank - CTSenthil IlangovanNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Reg. No: B - Optoelectronic Devices Exam QuestionsDocumento2 pagineReg. No: B - Optoelectronic Devices Exam QuestionsAnonymous Ndsvh2soNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Digital Signal Processing Question BankDocumento2 pagineDigital Signal Processing Question BankAnonymous Ndsvh2soNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Salem-Campus, Attur Main Road, Minnampalli, Salem - 636 106.: Mahendra College of EngineeringDocumento2 pagineSalem-Campus, Attur Main Road, Minnampalli, Salem - 636 106.: Mahendra College of EngineeringAnonymous Ndsvh2soNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- Reg. No: MAHENDRA COLLEGE OF ENGINEERING OPTOELECTRONIC DEVICES EXAMDocumento2 pagineReg. No: MAHENDRA COLLEGE OF ENGINEERING OPTOELECTRONIC DEVICES EXAMAnonymous Ndsvh2soNessuna valutazione finora
- Ec6651 Communication Engineering Unit 4Documento36 pagineEc6651 Communication Engineering Unit 4Anonymous Ndsvh2soNessuna valutazione finora
- Ec6651 Communication Engineering Unit 1Documento73 pagineEc6651 Communication Engineering Unit 1Anonymous Ndsvh2soNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Mahendra College of Engineering Vision and MissionDocumento2 pagineMahendra College of Engineering Vision and MissionAnonymous Ndsvh2soNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- CS8591 - CN Unit 1 PDFDocumento44 pagineCS8591 - CN Unit 1 PDFMsd70% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Mahendra College of Engineering, Salem - 636 106Documento3 pagineMahendra College of Engineering, Salem - 636 106Anonymous Ndsvh2soNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Mahendra College ECE PEO PO MappingDocumento2 pagineMahendra College ECE PEO PO MappingAnonymous Ndsvh2soNessuna valutazione finora
- Mahendra College of Engineering: Course SyllabusDocumento1 paginaMahendra College of Engineering: Course SyllabusAnonymous Ndsvh2soNessuna valutazione finora
- Mahendra College of Engineering: Programme Educational Objectives (Peos) StatementsDocumento1 paginaMahendra College of Engineering: Programme Educational Objectives (Peos) StatementsAnonymous Ndsvh2soNessuna valutazione finora
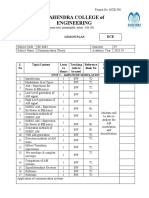
- Mahendra College of Engineering: Lesson PlanDocumento4 pagineMahendra College of Engineering: Lesson PlanAnonymous Ndsvh2soNessuna valutazione finora
- Mahendra College Communication Theory AssignmentDocumento1 paginaMahendra College Communication Theory AssignmentAnonymous Ndsvh2soNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Progress Norms CircularDocumento2 pagineProgress Norms CircularAnonymous Ndsvh2soNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- EC8491 Communication Theory Question BankDocumento4 pagineEC8491 Communication Theory Question BankAnonymous Ndsvh2soNessuna valutazione finora
- Engineering Admission Open for B.E/B.Tech at Just Rs. 10,000/YearDocumento1 paginaEngineering Admission Open for B.E/B.Tech at Just Rs. 10,000/YearAnonymous Ndsvh2soNessuna valutazione finora
- TEST PLAN NewDocumento1 paginaTEST PLAN NewAnonymous Ndsvh2soNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- India's No. 1 IES ACADEMY Schedule: MECHANICAL BranchDocumento4 pagineIndia's No. 1 IES ACADEMY Schedule: MECHANICAL BranchAnonymous Ndsvh2soNessuna valutazione finora
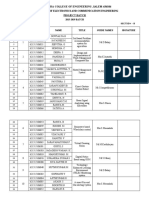
- Mahendra College Engineering Salem Projects 2015-2019Documento2 pagineMahendra College Engineering Salem Projects 2015-2019Anonymous Ndsvh2soNessuna valutazione finora
- (If Any) : Name: Register NumberDocumento1 pagina(If Any) : Name: Register NumberAnonymous Ndsvh2soNessuna valutazione finora
- GATE Coaching Fees StructureDocumento8 pagineGATE Coaching Fees StructureAnonymous Ndsvh2soNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Associates and Senior Associates: We Require For Voice ProcessDocumento1 paginaAssociates and Senior Associates: We Require For Voice ProcessAnonymous Ndsvh2soNessuna valutazione finora
- Modeling and Analysis of Hybrid Composite Strip With Bolted Joint Using FEMDocumento39 pagineModeling and Analysis of Hybrid Composite Strip With Bolted Joint Using FEMAnonymous Ndsvh2soNessuna valutazione finora
- Fujitsu Esprimo X923 Desktop PC: Data SheetDocumento8 pagineFujitsu Esprimo X923 Desktop PC: Data Sheetconmar5mNessuna valutazione finora
- Transmission Lines and WaveguidesDocumento109 pagineTransmission Lines and WaveguidesruikarsachinNessuna valutazione finora
- 2.1 Introduction BJTDocumento3 pagine2.1 Introduction BJTlizhi0007Nessuna valutazione finora
- Eee342 hw3 PDFDocumento2 pagineEee342 hw3 PDFRedion XhepaNessuna valutazione finora
- DCN Case StudyDocumento8 pagineDCN Case Studyhimanshu guptaNessuna valutazione finora
- @3 FET FundamentalsDocumento210 pagine@3 FET Fundamentalschâu nguyễn ngọcNessuna valutazione finora
- Jm506 Programmable Logic ControlDocumento10 pagineJm506 Programmable Logic ControlMuhammad HafizNessuna valutazione finora
- Analog Electronics Circuit (ECE - 2101) (Make Up) RCSDocumento2 pagineAnalog Electronics Circuit (ECE - 2101) (Make Up) RCSdeevNessuna valutazione finora
- Project Report On Safety BoatDocumento36 pagineProject Report On Safety BoatNikil.A HadiNessuna valutazione finora
- SSP2N60B/SSS2N60B: 600V N-Channel MOSFETDocumento11 pagineSSP2N60B/SSS2N60B: 600V N-Channel MOSFETCuenta ParaNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Series CompensationDocumento3 pagineSeries CompensationMikail AkyolNessuna valutazione finora
- VHF and UHF Narrowbanding - Your Complete Guide To Meet The DeadlineDocumento109 pagineVHF and UHF Narrowbanding - Your Complete Guide To Meet The DeadlineTopcom Toki-VokiNessuna valutazione finora
- Multiple Choice Question (MCQ) of Power Systems Page-21Documento3 pagineMultiple Choice Question (MCQ) of Power Systems Page-21RitNessuna valutazione finora
- ENGIN 112 Intro To Electrical and Computer Engineering: Binary Adders and SubtractorsDocumento20 pagineENGIN 112 Intro To Electrical and Computer Engineering: Binary Adders and SubtractorsRichie LatchmanNessuna valutazione finora
- Práctica 1 TiristoresDocumento15 paginePráctica 1 TiristoresDorian JesusNessuna valutazione finora
- TNB Metering Requirements for Distributed Generation FacilitiesDocumento8 pagineTNB Metering Requirements for Distributed Generation FacilitiesAzree Mohd NoorNessuna valutazione finora
- LOGIC SeriesDocumento2 pagineLOGIC SeriesJosueFerreiraNessuna valutazione finora
- Bp308 Installation Manual GBDocumento154 pagineBp308 Installation Manual GBReynold SuarezNessuna valutazione finora
- PLCDocumento47 paginePLCishwarNessuna valutazione finora
- Bipolar Transistor BiasingDocumento29 pagineBipolar Transistor Biasingmoin_mohdNessuna valutazione finora
- TTC 1000Documento2 pagineTTC 1000svismaelNessuna valutazione finora
- Mobile Controlled Home Appliances Without MicrocontrollerDocumento3 pagineMobile Controlled Home Appliances Without MicrocontrollerSaurabh MangeshkarNessuna valutazione finora
- Ant WDocumento2 pagineAnt WMUHAMMAD TAUFIQNessuna valutazione finora
- How To Make A Dipole AntennaDocumento3 pagineHow To Make A Dipole AntennarzmNessuna valutazione finora
- Product Specifications Product Specifications: RV4PX306R RV4PX306RDocumento4 pagineProduct Specifications Product Specifications: RV4PX306R RV4PX306RLuis CarlosNessuna valutazione finora
- Data Sheet MKP1584Documento17 pagineData Sheet MKP1584aafeletronicaNessuna valutazione finora
- Build a 555 Pocket Synth KeyboardDocumento10 pagineBuild a 555 Pocket Synth KeyboardMarius DanilaNessuna valutazione finora
- Siemens 87L - Compatibility ModeDocumento46 pagineSiemens 87L - Compatibility ModeNoptana TummasitNessuna valutazione finora
- Haier HLH37ATBBDocumento43 pagineHaier HLH37ATBBelectroniclm5795Nessuna valutazione finora
- Marantz Sa7001 SMDocumento68 pagineMarantz Sa7001 SMPietertje58Nessuna valutazione finora