Potrebbero piacerti anche
- Practica UNIDAD 5 ExtracciónDocumento29 paginePractica UNIDAD 5 ExtracciónFrancisco Monterrosa PimientaNessuna valutazione finora
- Tema 4Documento21 pagineTema 4Elio barrios ibarraNessuna valutazione finora
- Presentación Unidad II MODELACIÓN DINAMICA DE SISTEMAS DE CONTROLDocumento61 paginePresentación Unidad II MODELACIÓN DINAMICA DE SISTEMAS DE CONTROLAlexandra VelazquezNessuna valutazione finora
- 4.2 InstrumentacionDocumento11 pagine4.2 InstrumentacionRichard MedinaNessuna valutazione finora
- Las Alinealidades (GananciaDocumento4 pagineLas Alinealidades (GananciakellyNessuna valutazione finora
- Ejercicio para Punto Extra PDFDocumento30 pagineEjercicio para Punto Extra PDFJonathan AlonsoNessuna valutazione finora
- Cuestionario DESTILACIONDocumento5 pagineCuestionario DESTILACIONJuan Jose ClavijoNessuna valutazione finora
- 3.2 Desarrollo de Funciones de TransferenciaDocumento7 pagine3.2 Desarrollo de Funciones de TransferenciaMartha L Pv RNessuna valutazione finora
- Calculo de Reactores IsotérmicosDocumento42 pagineCalculo de Reactores IsotérmicosFernanda Borquez0% (2)
- Calculos Flash THISDocumento60 pagineCalculos Flash THISAdi JcNessuna valutazione finora
- Intercambiador de Calor - Seis PasosDocumento6 pagineIntercambiador de Calor - Seis PasosHerbert SimsNessuna valutazione finora
- 6 Separadores de Baja Temperatura y Controladores de PresiónDocumento19 pagine6 Separadores de Baja Temperatura y Controladores de PresiónBertino Izquierdo ToledoNessuna valutazione finora
- AccidenteDocumento4 pagineAccidentecristianNessuna valutazione finora
- Clase 2 16-02-2021Documento22 pagineClase 2 16-02-2021Daniela Franco OsorioNessuna valutazione finora
- Ensayo Evaporador de Doble EfectoDocumento4 pagineEnsayo Evaporador de Doble EfectomargaritaNessuna valutazione finora
- HARINAS DE MINATITlANDocumento14 pagineHARINAS DE MINATITlANWILBER DE JESUS TORRES TORRESNessuna valutazione finora
- Caida de Presion en Lechos Empacados PREVIODocumento5 pagineCaida de Presion en Lechos Empacados PREVIODaniel AlmanzaNessuna valutazione finora
- Capítulo 7 de Metodología de DouglasDocumento4 pagineCapítulo 7 de Metodología de DouglasAdriana NeriNessuna valutazione finora
- Práctica 4 Dilatometria Laboratorio Integral IiDocumento13 paginePráctica 4 Dilatometria Laboratorio Integral IiRodolfo Luis LimónNessuna valutazione finora
- Tubos Concentricos, PasteurizacionDocumento9 pagineTubos Concentricos, PasteurizacionDiianaLauraMelendezNessuna valutazione finora
- Desalado Del CrudoDocumento15 pagineDesalado Del CrudoEstephanny Watsson G. HzNessuna valutazione finora
- Feedforward Lessons in Industrial InstrumentationDocumento23 pagineFeedforward Lessons in Industrial InstrumentationMartha Quiñonez JiménezNessuna valutazione finora
- Factor de Compresibilidad Del Gas ZDocumento9 pagineFactor de Compresibilidad Del Gas ZCarlozs Luizs'Nessuna valutazione finora
- Reporte 7. Planta de Gas NaturalDocumento11 pagineReporte 7. Planta de Gas NaturalRodrigo Merino LubetzkyNessuna valutazione finora
- Produccion DE CICLOHEXANODocumento44 pagineProduccion DE CICLOHEXANOBryan Roncal LlajarunaNessuna valutazione finora
- IntercambiadorDocumento1 paginaIntercambiadorHéctor Alejandro Serrano OrtizNessuna valutazione finora
- Binp U3 A1 AdmrDocumento4 pagineBinp U3 A1 AdmrÂdolfo MenesesNessuna valutazione finora
- Control de Procesos 1er Examen PDFDocumento105 pagineControl de Procesos 1er Examen PDFSilvia Gutierrez100% (1)
- Balance de Materia y Energia en Un Sistema Simple WordDocumento22 pagineBalance de Materia y Energia en Un Sistema Simple WordCarlos F.Nessuna valutazione finora
- Productos Derivados Del PropenoDocumento16 pagineProductos Derivados Del PropenoEdgardoNessuna valutazione finora
- Control CascadaDocumento5 pagineControl Cascadaadrian_87Nessuna valutazione finora
- Tarea 4,8 de EquilibrioDocumento3 pagineTarea 4,8 de EquilibrioeleuterioNessuna valutazione finora
- Visbreaking en EcuadorDocumento9 pagineVisbreaking en EcuadorPatricio Espinosa100% (1)
- Etapas Teoricas y Reales PDFDocumento15 pagineEtapas Teoricas y Reales PDFjudithNessuna valutazione finora
- Controladores PDFDocumento2 pagineControladores PDFIVAN DARIO PARRA GUZMANNessuna valutazione finora
- PD - Ingeniería de Control de Procesos - U3Documento14 paginePD - Ingeniería de Control de Procesos - U3ruben vazquez basaveNessuna valutazione finora
- 5.2 Fluidizacion PDFDocumento22 pagine5.2 Fluidizacion PDFLucero Chontal Estudillo100% (1)
- Producción Del Dimetil Carbonat1Documento7 pagineProducción Del Dimetil Carbonat1floryguapoNessuna valutazione finora
- Medidores de Flujo (Trabajo)Documento18 pagineMedidores de Flujo (Trabajo)Alan Mg0% (1)
- Absorción 1Documento35 pagineAbsorción 1Cristhian CarrizalesNessuna valutazione finora
- Control Con Intercambiadores de CalorDocumento18 pagineControl Con Intercambiadores de CalorYuskeila Bracamonte Boada100% (1)
- Celda de ArnoldDocumento13 pagineCelda de ArnoldHamiltonNessuna valutazione finora
- Sistema de 2 FasesDocumento17 pagineSistema de 2 FasesCesar ZapataNessuna valutazione finora
- Tiempo MuertoDocumento10 pagineTiempo Muertoalalcami9221Nessuna valutazione finora
- 3 Determinacion de Coeficiente de Transferencia de Calor en Un Evaporador de Doble EfectoDocumento14 pagine3 Determinacion de Coeficiente de Transferencia de Calor en Un Evaporador de Doble EfectoFranco Guadalupe Castillo VegaNessuna valutazione finora
- Procesos y Sistemas de Compresión y ExpansiónDocumento8 pagineProcesos y Sistemas de Compresión y ExpansiónMiguel VenegasNessuna valutazione finora
- Instrumentos Que Miden La Caida de PresionDocumento6 pagineInstrumentos Que Miden La Caida de Presionleslierp29Nessuna valutazione finora
- Actividad 1Documento2 pagineActividad 1Diego PalaciosNessuna valutazione finora
- Produccion de Etilbenceno A Partir de Etileno y Benceno en Fase LiquidaDocumento3 pagineProduccion de Etilbenceno A Partir de Etileno y Benceno en Fase LiquidaDoperta2100% (2)
- Lacteos Josue 3Documento6 pagineLacteos Josue 3KattyNessuna valutazione finora
- INFORME # 9 - EvaporadoresDocumento9 pagineINFORME # 9 - EvaporadoresKevin David Aguirre VallejoNessuna valutazione finora
- Técnicas de ControlDocumento10 pagineTécnicas de Controlingsepulveda30Nessuna valutazione finora
- Flujo TaponDocumento8 pagineFlujo TaponCristhian AymaNessuna valutazione finora
- Control AnticipativoDocumento20 pagineControl AnticipativoGrecia ChucNessuna valutazione finora
- Difusión LOU 2 Bergel Casanga TeránDocumento15 pagineDifusión LOU 2 Bergel Casanga TeránFelipe Andrés Arriagada GalleguillosNessuna valutazione finora
- Instrumentacion y ControlDocumento14 pagineInstrumentacion y ControlLili Garcia Torres0% (1)
- ForoDocumento4 pagineForoAliz AnmedNessuna valutazione finora
- Control CascadaDocumento8 pagineControl CascadaHugo LópezNessuna valutazione finora
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Da EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Valutazione: 2 su 5 stelle2/5 (1)
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Da EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Nessuna valutazione finora
- Guia Riodejaneiro Es Print v5Documento14 pagineGuia Riodejaneiro Es Print v5Fredy Cartez RubioNessuna valutazione finora
- Tema 3 ConveccionDocumento43 pagineTema 3 Conveccionjulian362Nessuna valutazione finora
- Amd Apuntes Transmision CalorDocumento60 pagineAmd Apuntes Transmision CalorAdi SallisacNessuna valutazione finora
- Trabajo de Energia EolicaDocumento3 pagineTrabajo de Energia EolicaCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Tema 2.07-Lagrange y EulerDocumento23 pagineTema 2.07-Lagrange y EulerMiguel Pacheco PalominoNessuna valutazione finora
- Tema 2.07-Lagrange y EulerDocumento23 pagineTema 2.07-Lagrange y EulerMiguel Pacheco PalominoNessuna valutazione finora
- Dibujos Tarima TottoDocumento3 pagineDibujos Tarima TottoCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Consideraciones de DiseñoDocumento4 pagineConsideraciones de DiseñoCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Dimensionamiento de Una ValvulaDocumento14 pagineDimensionamiento de Una ValvulaCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Instrucciones para Instalar Solidworks 2016Documento6 pagineInstrucciones para Instalar Solidworks 2016Camilo Andres Hoyos AlvarezNessuna valutazione finora
- P&id Planta de Tratamiento de AguaDocumento1 paginaP&id Planta de Tratamiento de AguaCamilo Andres Hoyos AlvarezNessuna valutazione finora
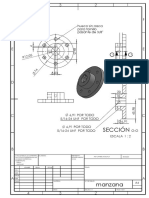
- Plano ManzanaDocumento1 paginaPlano ManzanaCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Presentacion Bancos de TrabajoDocumento9 paginePresentacion Bancos de TrabajoCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Avance Formulario v2 r1Documento17 pagineAvance Formulario v2 r1Camilo Andres Hoyos AlvarezNessuna valutazione finora
- Plano ManzanaDocumento1 paginaPlano ManzanaCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Ejemplo Pieza Torneado CNC Con WINUNISOFTDocumento5 pagineEjemplo Pieza Torneado CNC Con WINUNISOFTTony Marasca100% (1)
- 5S Country MotorsDocumento3 pagine5S Country MotorsCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Calculo Del Sistema de DuctosDocumento4 pagineCalculo Del Sistema de DuctosCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Proyecto PlantasDocumento3 pagineProyecto PlantasCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Beneficios y Problemas Con La Implementacion de Lubricantes Sinteticos EnsayoDocumento2 pagineBeneficios y Problemas Con La Implementacion de Lubricantes Sinteticos EnsayoCamilo Andres Hoyos AlvarezNessuna valutazione finora
- CODocumento1 paginaCOCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Sistema TermicoDocumento4 pagineSistema TermicoCamilo Andres Hoyos AlvarezNessuna valutazione finora
- El Mito de La ViscosidadDocumento7 pagineEl Mito de La ViscosidaderwinperezrNessuna valutazione finora
- Análisis de La Actualidad Del Sector de Transporte en ColombiaDocumento4 pagineAnálisis de La Actualidad Del Sector de Transporte en ColombiaCamilo Andres Hoyos AlvarezNessuna valutazione finora
- 131 Regulares y MBP Web BogDocumento1 pagina131 Regulares y MBP Web BogSebastian Perez VelandiaNessuna valutazione finora
- Seguridad IndustrialDocumento2 pagineSeguridad IndustrialCamilo Andres Hoyos AlvarezNessuna valutazione finora
- Conversion InformaticaDocumento3 pagineConversion InformaticaninjachuNessuna valutazione finora
- Proposiciones Jurídicas - PERÚDocumento19 pagineProposiciones Jurídicas - PERÚJoseLuisHerediaNessuna valutazione finora
- Discriminación de La Palabra y LogoaudiometríaDocumento3 pagineDiscriminación de La Palabra y LogoaudiometríaManuel Alejandro Collipal MillaqueoNessuna valutazione finora
- Adj React 2Documento2 pagineAdj React 2DAYANA ANGELA CASTILLA VARGASNessuna valutazione finora
- Teorias y Modelos de Enfermeria: ConceptosDocumento3 pagineTeorias y Modelos de Enfermeria: ConceptosAbby GalvanNessuna valutazione finora
- La Caída Del HombreDocumento15 pagineLa Caída Del HombrehndzjavierNessuna valutazione finora
- TALLERnGA2n220501096nAA2nEV01 77635c06abc0988Documento11 pagineTALLERnGA2n220501096nAA2nEV01 77635c06abc0988Fernando GranadosNessuna valutazione finora
- FedraDocumento13 pagineFedraLilium DeaNessuna valutazione finora
- Horarios Docentes (Actualizado)Documento16 pagineHorarios Docentes (Actualizado)Gaby ViteriNessuna valutazione finora
- Introducción A Las HebrasDocumento5 pagineIntroducción A Las HebrasMario CórdobaNessuna valutazione finora
- Significado de Las FloresDocumento10 pagineSignificado de Las FloresSamantha GarcíaNessuna valutazione finora
- Qué Es El PárrafoDocumento20 pagineQué Es El PárrafoYanelis RamosNessuna valutazione finora
- Venda Sobre Los OjosDocumento5 pagineVenda Sobre Los OjosRodrigo SanchezNessuna valutazione finora
- Repaso 1 EsoDocumento26 pagineRepaso 1 EsoTinky Winky Winky TinkyNessuna valutazione finora
- Tarea CristologíaDocumento15 pagineTarea CristologíaNoé HernándezNessuna valutazione finora
- Informe Escrito Sobre Aplicación de Matrices Como Herramientas de Optimizacion Dentro de La Empresa ProyectoDocumento15 pagineInforme Escrito Sobre Aplicación de Matrices Como Herramientas de Optimizacion Dentro de La Empresa ProyectoJose Manuel Leal PerdomoNessuna valutazione finora
- MODELO de CARTAS Formal-InformalDocumento4 pagineMODELO de CARTAS Formal-InformalAlicia García100% (1)
- Tema 28-La SílabaDocumento5 pagineTema 28-La SílabaAlonso SalinasNessuna valutazione finora
- Microestructura TextualDocumento3 pagineMicroestructura TextualDiego FVNessuna valutazione finora
- El Teatro, Principios y FundamentosDocumento33 pagineEl Teatro, Principios y FundamentosCarlos Arango50% (2)
- 1978 Lyotard La Condición PostmodernaDocumento4 pagine1978 Lyotard La Condición PostmodernaGiampiero SosaNessuna valutazione finora
- Cacada MyriamDocumento1 paginaCacada MyriamBrayanNessuna valutazione finora
- Hacia La Meta 1 PDFDocumento60 pagineHacia La Meta 1 PDFlimon0606123825% (4)
- Minayo Cap 4Documento45 pagineMinayo Cap 4pajariuxNessuna valutazione finora
- Evaluacion Final - Escenario 8 - SEGUNDO BLOQUE-TEORICO - PRACTICO - DIBUJO TECNICO - (GRUPO B04)Documento10 pagineEvaluacion Final - Escenario 8 - SEGUNDO BLOQUE-TEORICO - PRACTICO - DIBUJO TECNICO - (GRUPO B04)Nelson SanchezNessuna valutazione finora
- Tarea de CompuDocumento4 pagineTarea de CompuVeronica GuerraNessuna valutazione finora
- Guia 3 Matemática Unidad IDocumento9 pagineGuia 3 Matemática Unidad IDiego LopezNessuna valutazione finora
- Continuacion 2 Cuentos LatinoamericanosDocumento4 pagineContinuacion 2 Cuentos LatinoamericanosMelissa Liset Lopez OchoaNessuna valutazione finora
- Tema N 7 - La Mujer Diseñada para Recibir La Gracia de DiosDocumento5 pagineTema N 7 - La Mujer Diseñada para Recibir La Gracia de DiosYony Moreno100% (1)
- El Silabario de San Miguel MeerDocumento1 paginaEl Silabario de San Miguel Meergtorresg2078Nessuna valutazione finora