Potrebbero piacerti anche
- Rosca AcmeDocumento6 pagineRosca Acmeleinat553233% (3)
- Catalogo Gerdau 2011Documento66 pagineCatalogo Gerdau 2011fylypeNessuna valutazione finora
- Florilegios Espirituais - Divaldo FrancoDocumento60 pagineFlorilegios Espirituais - Divaldo FrancoSheilaNessuna valutazione finora
- Fispq - Detergente Girando SolDocumento5 pagineFispq - Detergente Girando SolAna Guberte50% (2)
- História e Geografia de RondôniaDocumento134 pagineHistória e Geografia de RondôniaLucas MoreiraNessuna valutazione finora
- Fichamento Texto A Brincadeira Suas Implicações No Processo de AprendizagemDocumento6 pagineFichamento Texto A Brincadeira Suas Implicações No Processo de Aprendizagemchriscost100% (1)
- Exercicios de Aplicacoes para o GRAFCETDocumento7 pagineExercicios de Aplicacoes para o GRAFCETcheguevaraeng100% (1)
- Desenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoDa EverandDesenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoNessuna valutazione finora
- Provas Enade - Tecnologia - em - Automacao - Industrial - 2011Documento32 pagineProvas Enade - Tecnologia - em - Automacao - Industrial - 2011Dylan HardNessuna valutazione finora
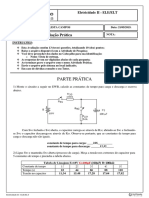
- Avaliação Prática - Eletricidade IIDocumento6 pagineAvaliação Prática - Eletricidade IINilton CamposNessuna valutazione finora
- Projeto e Análise de Compensadores Por Intemédio Da Resposta em FrequênciaDocumento9 pagineProjeto e Análise de Compensadores Por Intemédio Da Resposta em FrequênciaCavalini Assessoria AcadêmicaNessuna valutazione finora
- Exercícios ResolvidosDocumento3 pagineExercícios ResolvidosKarolina AzevedoNessuna valutazione finora
- $RPLYSLDDocumento5 pagine$RPLYSLDFelipe Caldas Ferreira dos SantosNessuna valutazione finora
- CE Aula 02 TransformadoresDocumento47 pagineCE Aula 02 TransformadoresJbprofessor BatistaNessuna valutazione finora
- Aula 3 02-04-2018 Sist. Polif. EquilibradosDocumento130 pagineAula 3 02-04-2018 Sist. Polif. EquilibradosJoão LucasNessuna valutazione finora
- Cap. 4 - Tabela Quadripolos 1 - Livro FuchsDocumento1 paginaCap. 4 - Tabela Quadripolos 1 - Livro FuchsThiago CarvalhoNessuna valutazione finora
- CicloconversoresDocumento7 pagineCicloconversoresDaniel OliboniNessuna valutazione finora
- Sistema Logico 03 - Controle de Nivel Com Tanque ReservaDocumento1 paginaSistema Logico 03 - Controle de Nivel Com Tanque ReservaESS AUTOMAÇÃONessuna valutazione finora
- Lista Leis Kirchoff Associacao ResistoresDocumento2 pagineLista Leis Kirchoff Associacao Resistorescheguevaraeng0% (1)
- Aula 04 - Exercícios GrafcetDocumento11 pagineAula 04 - Exercícios GrafcetBruna Alves100% (2)
- Aula 3 e 1 CompletasDocumento17 pagineAula 3 e 1 CompletasDayvson FerreiraNessuna valutazione finora
- Acionamentos Aula Prática 2 - Partida Direta de Um Motor ElétricoDocumento2 pagineAcionamentos Aula Prática 2 - Partida Direta de Um Motor ElétricoJosé Ronaldo Tavares SantosNessuna valutazione finora
- Amplificadores Operacionais e Filtros AtivosDocumento18 pagineAmplificadores Operacionais e Filtros AtivosMarcelo OliveiraNessuna valutazione finora
- 6-Controle-I-Analogia de Sistemas Mecânicos e Elétricos PDFDocumento23 pagine6-Controle-I-Analogia de Sistemas Mecânicos e Elétricos PDFLucas NunesNessuna valutazione finora
- Prova de SubestaçãoDocumento9 pagineProva de SubestaçãoGustavo Rodrigo SantanaNessuna valutazione finora
- Instalações Prediais Diagramas OriginalDocumento20 pagineInstalações Prediais Diagramas OriginalThiago Filipe Cecchin Paza100% (1)
- Entradas Analogicas Pic16f628aDocumento6 pagineEntradas Analogicas Pic16f628apaivafrotaNessuna valutazione finora
- Atividade 4 - Acionamentos Elétricos - 51-2023Documento5 pagineAtividade 4 - Acionamentos Elétricos - 51-2023Cavalini Assessoria AcadêmicaNessuna valutazione finora
- 01 - Maquinas Elétricas - Conceito PDFDocumento100 pagine01 - Maquinas Elétricas - Conceito PDFCelso Ciamponi100% (1)
- EXERCÍCIOS cfw08Documento3 pagineEXERCÍCIOS cfw08mota_j100% (1)
- Esquema de Força e Comando Chave Compensadora Com ReversãoDocumento18 pagineEsquema de Força e Comando Chave Compensadora Com ReversãomateusheNessuna valutazione finora
- Questionario Partida Estrela - TriânguloDocumento7 pagineQuestionario Partida Estrela - TriânguloSaulo CâmaraNessuna valutazione finora
- Atividade de Pesquisa - Instalações ElétricasDocumento8 pagineAtividade de Pesquisa - Instalações Elétricasmauro flores100% (1)
- Relatorio Pratica 1Documento5 pagineRelatorio Pratica 1Flávia Mendonça MarquesNessuna valutazione finora
- Revisão para Prova Projeto Predial 2Documento8 pagineRevisão para Prova Projeto Predial 2Matheus OliveiraNessuna valutazione finora
- Transformadores MonofásicosDocumento5 pagineTransformadores MonofásicosFagner Michel LimaNessuna valutazione finora
- Exercícios de ParametrizaçãoDocumento1 paginaExercícios de ParametrizaçãoRonne Herbert100% (2)
- Exercicios de Logica Digital - Lista 1Documento4 pagineExercicios de Logica Digital - Lista 1Paulo DiasNessuna valutazione finora
- 3-Controle-I-Função de Transferência e Diagrama de Blocos PDFDocumento41 pagine3-Controle-I-Função de Transferência e Diagrama de Blocos PDFLucas Nunes100% (1)
- Aula Controle PIDDocumento27 pagineAula Controle PIDPedro NavarroNessuna valutazione finora
- INTRODUÇÃO Fonte LinearDocumento12 pagineINTRODUÇÃO Fonte LinearJosé Carlos SimõesNessuna valutazione finora
- Ensaios de Rotina em Transformadores ElétricosDocumento5 pagineEnsaios de Rotina em Transformadores Elétricosdiegofarias2010Nessuna valutazione finora
- Prova - Processos IndustriaisDocumento3 pagineProva - Processos IndustriaisAmanda SantosNessuna valutazione finora
- Exercicios de CLPDocumento11 pagineExercicios de CLPVanessa MartinsNessuna valutazione finora
- Exercicios Adicionais de Maquinas CCDocumento5 pagineExercicios Adicionais de Maquinas CCJosé Gabriel Hermes Cavalcanti100% (1)
- List A 011Documento4 pagineList A 011Francisco Rodrigues CoelhoNessuna valutazione finora
- DahlanderDocumento1 paginaDahlanderMathews WsllanderNessuna valutazione finora
- CCAexer Resolvidos IDocumento10 pagineCCAexer Resolvidos IAlexsandro Da SilvaNessuna valutazione finora
- Catalogo Linha Eletrica VicapDocumento28 pagineCatalogo Linha Eletrica Vicapvagner alvesNessuna valutazione finora
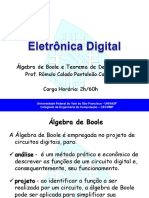
- Algebra de BooleDocumento22 pagineAlgebra de BooleJuliano MartinsNessuna valutazione finora
- Exercícios de Máquinas CCDocumento3 pagineExercícios de Máquinas CCMarcos CiriloNessuna valutazione finora
- Prática Laboratorial de Circuitos Elétricos I 919067-1Documento4 paginePrática Laboratorial de Circuitos Elétricos I 919067-1fnemberNessuna valutazione finora
- Relatório Ladder - Lab 1 de AutomaçãoDocumento18 pagineRelatório Ladder - Lab 1 de AutomaçãoORANGIIE100% (1)
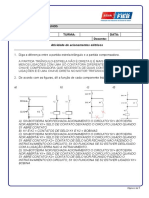
- Avaliação Prática - Eletrônica Digital-1 29Documento2 pagineAvaliação Prática - Eletrônica Digital-1 29Gielly CamposNessuna valutazione finora
- Aula Atividade 08 - CLPDocumento2 pagineAula Atividade 08 - CLPJefferson AlmeidaNessuna valutazione finora
- RealimentaçãoDocumento22 pagineRealimentaçãorfsoc100% (2)
- PCPT3 PDFDocumento17 paginePCPT3 PDFdanieljsouzaNessuna valutazione finora
- Aula 02 - Corrente AlternadaDocumento8 pagineAula 02 - Corrente AlternadaPaulo FernandoNessuna valutazione finora
- Relatório - TermoparesDocumento5 pagineRelatório - TermoparesJefferson HaagNessuna valutazione finora
- Aula 2 9 Ensaio de Transformador TrifsicoDocumento6 pagineAula 2 9 Ensaio de Transformador TrifsicoAnamaria Ucucho100% (1)
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiiDa EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiiNessuna valutazione finora
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoDa EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoNessuna valutazione finora
- Projetos De Instrumentação Eletrônica Usando O ArduinoDa EverandProjetos De Instrumentação Eletrônica Usando O ArduinoNessuna valutazione finora
- Curso - Consagrandos 2018Documento2 pagineCurso - Consagrandos 2018Shekináh EquipamentosNessuna valutazione finora
- Catálogo de Cilindros Pneumáticos PDFDocumento155 pagineCatálogo de Cilindros Pneumáticos PDFRenato César AndradeNessuna valutazione finora
- Set2012 Apostila Te CorteDocumento82 pagineSet2012 Apostila Te CorteWelly DiasNessuna valutazione finora
- Set2012 Apostila Te CorteDocumento82 pagineSet2012 Apostila Te CorteWelly DiasNessuna valutazione finora
- Análise - Tabela Da Lista Das Escolas - DetalhadoDocumento308 pagineAnálise - Tabela Da Lista Das Escolas - DetalhadoSamuel PedroNessuna valutazione finora
- ExercíciosDocumento4 pagineExercíciosPaulo JúniorNessuna valutazione finora
- Pequena e Grande Circulação Sanguínea - Veias e 2018 ROMULODocumento19 paginePequena e Grande Circulação Sanguínea - Veias e 2018 ROMULORegina Falcão100% (1)
- PT - dt.PDN.03.05.012 - Padrão de Montagens em Postes Duplo TDocumento57 paginePT - dt.PDN.03.05.012 - Padrão de Montagens em Postes Duplo TPaulo BispoNessuna valutazione finora
- TCC DiegoDocumento61 pagineTCC DiegoMilena RochaNessuna valutazione finora
- Verbos YorubaDocumento17 pagineVerbos YorubaPaulo R Roberto100% (1)
- Pressões AnormaisDocumento38 paginePressões AnormaisLuiz Antonio Pereira0% (1)
- Komeco20di - ManualDocumento13 pagineKomeco20di - ManualEduardoNessuna valutazione finora
- Aula Sobre FelicidadeDocumento25 pagineAula Sobre FelicidadeCamila PedrosaNessuna valutazione finora
- Recurso PronominalizaçãoDocumento1 paginaRecurso PronominalizaçãoMytimeNessuna valutazione finora
- Slides Oficiais Da Qualificação - 20 Dezembro 2022 AtualizadoDocumento21 pagineSlides Oficiais Da Qualificação - 20 Dezembro 2022 AtualizadoGlauber PinheiroNessuna valutazione finora
- 4p119e05 01Documento9 pagine4p119e05 01Pandora RostyNessuna valutazione finora
- CONSOLOS CURTOS ALTA REST Sad - Fabiokassouf - MDocumento122 pagineCONSOLOS CURTOS ALTA REST Sad - Fabiokassouf - MGabriel SilvaNessuna valutazione finora
- Cordel-Convite Dia Nacional Da Matematica 2017 Prof Mara Matemática SESC Cidadania Goiânia-GODocumento1 paginaCordel-Convite Dia Nacional Da Matematica 2017 Prof Mara Matemática SESC Cidadania Goiânia-GOSousa MaraNessuna valutazione finora
- CALVET, Louis-Jean. Comportamentos e AtitudesDocumento2 pagineCALVET, Louis-Jean. Comportamentos e AtitudesAmanda Ramos0% (1)
- fq8 - Teste 3 - EnunciadoDocumento6 paginefq8 - Teste 3 - EnunciadoCarla Alexandra Estevam CanhotoNessuna valutazione finora
- NBN ArtigoDocumento3 pagineNBN ArtigoDaniel da Silva VasemNessuna valutazione finora
- Alcenos, Alcinos, Álcoois e ÉteresDocumento3 pagineAlcenos, Alcinos, Álcoois e ÉteresOrlando FirmezaNessuna valutazione finora
- Собираем Hi-Fi УНЧ StonecoldDocumento5 pagineСобираем Hi-Fi УНЧ StonecoldmarcosscaratoNessuna valutazione finora
- TCF Mudanças ClimáticasDocumento17 pagineTCF Mudanças ClimáticasFrancisco GalvãoNessuna valutazione finora
- NTC35Documento141 pagineNTC35Alessandro OliveiraNessuna valutazione finora
- Orçamento e Controlo OrçamentalDocumento17 pagineOrçamento e Controlo OrçamentalGambasGambas0% (1)
- 1649960368008nr 26 e NBR 7195 As Normas Essenciais para Quem Trabalha Com Sinalizacao Viaria de Seguranca 1Documento6 pagine1649960368008nr 26 e NBR 7195 As Normas Essenciais para Quem Trabalha Com Sinalizacao Viaria de Seguranca 1Tainá AlmeidaNessuna valutazione finora
- NR-13. Apresentação TRABALHOpptDocumento18 pagineNR-13. Apresentação TRABALHOpptbordrinNessuna valutazione finora
- 0 - Contabilidade, Conceito, Objeto, Objetivos, Finalidades, TécnicasDocumento45 pagine0 - Contabilidade, Conceito, Objeto, Objetivos, Finalidades, TécnicasAnonymous 4pJZJONessuna valutazione finora