Potrebbero piacerti anche
- Brushed DC Electric Motor - WikipediaDocumento63 pagineBrushed DC Electric Motor - WikipediaKISHORE PERUMALLANessuna valutazione finora
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Da EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Nessuna valutazione finora
- DC Motors: - Construction Very Similar To A DC GeneratorDocumento35 pagineDC Motors: - Construction Very Similar To A DC GeneratorDeepak Ganachari100% (1)
- DC Machine Experiments ManualDocumento25 pagineDC Machine Experiments ManualTumzangwanaNessuna valutazione finora
- Electrical TransformerDocumento16 pagineElectrical TransformerImranMemonNessuna valutazione finora
- Basic Motor ControlDocumento17 pagineBasic Motor ControlHeizen BulanNessuna valutazione finora
- Single Phase Induction MotorDocumento7 pagineSingle Phase Induction MotorReeta Dutta100% (1)
- 3 Line ConverterDocumento10 pagine3 Line ConverterJay Romar PabianiaNessuna valutazione finora
- Utilization of Electrical EnergyDocumento17 pagineUtilization of Electrical EnergyVARALAKSHMI SEERAPUNessuna valutazione finora
- Ch7 Induction MotorDocumento82 pagineCh7 Induction MotorMuhammad R ShihadehNessuna valutazione finora
- 022 - Lecture 22 360 Chapter 7 Single Phase Induction MotorDocumento29 pagine022 - Lecture 22 360 Chapter 7 Single Phase Induction Motorapi-369945467% (3)
- Dynamic Modeling and Analysis of Three Phase Self-Excited Induction Generator Using Generalized State Space ApproachDocumento8 pagineDynamic Modeling and Analysis of Three Phase Self-Excited Induction Generator Using Generalized State Space ApproachAnonymous On47lKiNessuna valutazione finora
- DC Shunt MotorDocumento14 pagineDC Shunt MotorJohn kamandaNessuna valutazione finora
- Synchronous Generator PART ADocumento34 pagineSynchronous Generator PART ApayalNessuna valutazione finora
- Questions On DC MotorsDocumento36 pagineQuestions On DC Motorskibrom atsbhaNessuna valutazione finora
- Magnetization Curve of DC Generator - Electrical4uDocumento5 pagineMagnetization Curve of DC Generator - Electrical4uM Kumar MarimuthuNessuna valutazione finora
- Advanced Power Electronics and Microcontrollers For Renewable Energy SystemsDocumento39 pagineAdvanced Power Electronics and Microcontrollers For Renewable Energy Systemsbisrat yeshidagnaNessuna valutazione finora
- Single Phase TransformerDocumento37 pagineSingle Phase TransformerMohamed Rezza Mohd NohNessuna valutazione finora
- A Textbook of Electrical Technology by R.K.rajputDocumento514 pagineA Textbook of Electrical Technology by R.K.rajputSrikant Misra100% (2)
- 2002 Lecture - 5-7Documento21 pagine2002 Lecture - 5-7acc gemNessuna valutazione finora
- Eeeviews: Unit Iv Synchronous Motor DrivesDocumento26 pagineEeeviews: Unit Iv Synchronous Motor Driveskrithikgokul selvamNessuna valutazione finora
- Electric Motors and GeneratorsDocumento30 pagineElectric Motors and GeneratorshafizrahimmitNessuna valutazione finora
- Ge2151 Beee NotesDocumento143 pagineGe2151 Beee NotesNanda Subramanian100% (1)
- Lecture Notes - Power Electronics PDFDocumento197 pagineLecture Notes - Power Electronics PDFM.T. KadamNessuna valutazione finora
- Induction GeneratorDocumento4 pagineInduction GeneratorAaryanNessuna valutazione finora
- Chapter 3Documento46 pagineChapter 3Tewodros ShegawNessuna valutazione finora
- 6.1. Concept of Power FactorDocumento10 pagine6.1. Concept of Power FactormahaprabuasNessuna valutazione finora
- Current ElectricityDocumento26 pagineCurrent ElectricityEr Ashish BahetiNessuna valutazione finora
- Induction MotorDocumento20 pagineInduction MotorC V VIJAY KUMASRNessuna valutazione finora
- Voltage Regulation in TransformerDocumento6 pagineVoltage Regulation in TransformerRajat Tak100% (1)
- Internship KsebDocumento97 pagineInternship KsebVishnu VijayaramanNessuna valutazione finora
- Unit 3 - DC - MotorDocumento39 pagineUnit 3 - DC - MotordhoniNessuna valutazione finora
- Inverter PDFDocumento84 pagineInverter PDFVenkedesh RNessuna valutazione finora
- Labvolt Todas Las Practicas Cwa8001Documento70 pagineLabvolt Todas Las Practicas Cwa8001Yorgos J. Ramirez PNessuna valutazione finora
- AC Machine 4Documento35 pagineAC Machine 4Fadhil A. HasanNessuna valutazione finora
- Electrical Machines, Drives, and Power Systems 5E (Theodore Wildi)Documento907 pagineElectrical Machines, Drives, and Power Systems 5E (Theodore Wildi)Nouman MemonNessuna valutazione finora
- Chap1 Special MachinesDocumento23 pagineChap1 Special MachinesHell Maax100% (2)
- Single-Phase Induction MotorsDocumento82 pagineSingle-Phase Induction MotorsVinay PrakashNessuna valutazione finora
- 02 Uncontrolled AC To DC Converters3Documento46 pagine02 Uncontrolled AC To DC Converters3siegfred sicatNessuna valutazione finora
- Buck Boost ProjectDocumento24 pagineBuck Boost ProjectRonald LugwireNessuna valutazione finora
- Boost DesignDocumento4 pagineBoost DesignmuthukumartharaniNessuna valutazione finora
- Magnetic CircuitsDocumento38 pagineMagnetic CircuitsHanan KemalNessuna valutazione finora
- Basics of ElectricalDocumento178 pagineBasics of Electricaludayakumart50% (2)
- Chapter 5 Induction Machines PDFDocumento165 pagineChapter 5 Induction Machines PDFMillion GebretsadikNessuna valutazione finora
- Assignment Unit 1Documento2 pagineAssignment Unit 1DHANUSH SHIVANANDNessuna valutazione finora
- Circuit Simulation of A BLDC MotorDocumento4 pagineCircuit Simulation of A BLDC MotorjpmacabascoNessuna valutazione finora
- Tutorial1 (SynchronousMchines)Documento3 pagineTutorial1 (SynchronousMchines)Zamira JamilNessuna valutazione finora
- Basic Electrical EngineeringDocumento25 pagineBasic Electrical Engineeringamrit323Nessuna valutazione finora
- Daniel Baechle ThesisDocumento76 pagineDaniel Baechle ThesisPrince KumarNessuna valutazione finora
- Electric DrivesDocumento2 pagineElectric DrivesnikunjNessuna valutazione finora
- Special Electrical MachinesDocumento62 pagineSpecial Electrical MachinesVineeth Valiyaveedu Vijayan100% (9)
- Power Systems Guides Book by CL Wadhwa PDFDocumento3 paginePower Systems Guides Book by CL Wadhwa PDFAnkit Kumar0% (4)
- Common Emitter UnbypassedDocumento38 pagineCommon Emitter Unbypassedaliffuden 123Nessuna valutazione finora
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveDocumento5 paginePCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelNessuna valutazione finora
- Electric DrivesDocumento15 pagineElectric DriveskalerusaNessuna valutazione finora
- EE6504 Electrical Machines-II PDFDocumento233 pagineEE6504 Electrical Machines-II PDFkumar m100% (1)
- Application of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEDocumento5 pagineApplication of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEshailesh singhNessuna valutazione finora
- DC Motor Intrinsic NotesDocumento3 pagineDC Motor Intrinsic Notesimran kadriNessuna valutazione finora
- Shunt-Wound Motor Final ReportDocumento12 pagineShunt-Wound Motor Final ReportJeco Roy OsorioNessuna valutazione finora
- Electrical MotorDocumento55 pagineElectrical Motorabdulkadhir100% (1)
- Nathpa Jhakri Hydro Power Station (6 250MW) : Satluj Jal Vidyut Nigam LTD. Presented By: Prajwal Deep Rai 11007782Documento15 pagineNathpa Jhakri Hydro Power Station (6 250MW) : Satluj Jal Vidyut Nigam LTD. Presented By: Prajwal Deep Rai 11007782Prajwal Deep RaiNessuna valutazione finora
- List of TablesDocumento2 pagineList of TablesPrajwal Deep RaiNessuna valutazione finora
- Ar01 02Documento143 pagineAr01 02Prajwal Deep RaiNessuna valutazione finora
- Advancement of The Solar Air Conditioning SystemDocumento21 pagineAdvancement of The Solar Air Conditioning SystemPrajwal Deep Rai100% (1)
- Categorizing Biometric ApplicationsDocumento12 pagineCategorizing Biometric ApplicationsPrajwal Deep RaiNessuna valutazione finora
- Viability of CDM Projects in India: A Study of Chanju CDM Project in Chamba District of Himachal Pradesh IndiaDocumento32 pagineViability of CDM Projects in India: A Study of Chanju CDM Project in Chamba District of Himachal Pradesh IndiakingbahraNessuna valutazione finora
- Energy Supply Side and Demand Side ManagementDocumento26 pagineEnergy Supply Side and Demand Side ManagementGaurav SapkotaNessuna valutazione finora
- Energy & PowerDocumento20 pagineEnergy & PowerBilal AhmadNessuna valutazione finora
- Hydraulic Machines TextbookDocumento369 pagineHydraulic Machines Textbookmeku44100% (5)
- Antaisolar Mounting SystemDocumento16 pagineAntaisolar Mounting SystemMel Bryan Escobido SolisNessuna valutazione finora
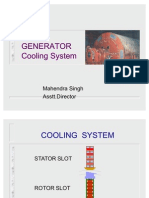
- Awantha Power - Generator Cooling SystemDocumento54 pagineAwantha Power - Generator Cooling SystemParvin KumarNessuna valutazione finora
- Iso 8217 2017Documento2 pagineIso 8217 2017Carlos Luis Esquerdo Marcano100% (2)
- Pipeline NetworkDocumento17 paginePipeline Networkaymansh3204Nessuna valutazione finora
- MOGP Summit: Oil and Gas Outlook and Price TrendsDocumento14 pagineMOGP Summit: Oil and Gas Outlook and Price TrendskothuwonNessuna valutazione finora
- Roll Paper Fire ProtectionDocumento22 pagineRoll Paper Fire ProtectionRicardoLauferNessuna valutazione finora
- KUWAITDocumento3 pagineKUWAITarvin4dNessuna valutazione finora
- Briquette Moulding MachineDocumento29 pagineBriquette Moulding MachineLife of kalyanNessuna valutazione finora
- Schneider Conext XW Power System Installation Guide Rev F EngDocumento184 pagineSchneider Conext XW Power System Installation Guide Rev F EngniantonsNessuna valutazione finora
- Calpeda GXR, GXV Submersible Drainage PumpsDocumento4 pagineCalpeda GXR, GXV Submersible Drainage PumpsWayne SeamanNessuna valutazione finora
- Solar Street Lamp With Motion Sensor PDFDocumento5 pagineSolar Street Lamp With Motion Sensor PDFYogi TripathiNessuna valutazione finora
- Vertical Turbine Submersible Pump BrochureDocumento12 pagineVertical Turbine Submersible Pump BrochuremasatusNessuna valutazione finora
- SGS Group Profile enDocumento8 pagineSGS Group Profile enchienNessuna valutazione finora
- DC1671A - 480-483kW Scania Data SheetDocumento2 pagineDC1671A - 480-483kW Scania Data SheetDenzal Wishington0% (1)
- Manual Baterias SaftsDocumento90 pagineManual Baterias SaftsEduardo E Castillo100% (1)
- Visiongain Energy Report Catalogue EI PDFDocumento39 pagineVisiongain Energy Report Catalogue EI PDFVisiongainGlobalNessuna valutazione finora
- HCM434DDocumento8 pagineHCM434D3efooNessuna valutazione finora
- Drawing Monitor: NO Drawing Title Shop Drawing Submitted Revisi Approved Date Date Date Instalasi Air BersihDocumento4 pagineDrawing Monitor: NO Drawing Title Shop Drawing Submitted Revisi Approved Date Date Date Instalasi Air Bersihsaus sambalNessuna valutazione finora
- Experimental Investigation of A Lysholm Turbine Operating WithDocumento8 pagineExperimental Investigation of A Lysholm Turbine Operating WithmehmacarNessuna valutazione finora
- Grundfos NB-NK Brochure LOWDocumento3 pagineGrundfos NB-NK Brochure LOWGrundfosEgyptNessuna valutazione finora
- Methanol: PropertiesDocumento5 pagineMethanol: PropertiesAlaidja BayonoNessuna valutazione finora
- TC FLS Sihi Leh 1200 1500 1800 enDocumento10 pagineTC FLS Sihi Leh 1200 1500 1800 enGustavo ZavalaNessuna valutazione finora
- CompressorDocumento6 pagineCompressorproxywarNessuna valutazione finora
- Atomic Particles Chart: + o - ST ND RD THDocumento2 pagineAtomic Particles Chart: + o - ST ND RD THZexdxrNessuna valutazione finora
- Polyphase SystemDocumento2 paginePolyphase SystemChocomalteeChocomaltee100% (1)
- Series LFN223B, LFN223BS Specification SheetDocumento2 pagineSeries LFN223B, LFN223BS Specification SheetWattsNessuna valutazione finora