Potrebbero piacerti anche
- Nonlinear Analysis: Geometric, Material and Contact EffectsDocumento4 pagineNonlinear Analysis: Geometric, Material and Contact EffectsCiviltech LabNessuna valutazione finora
- Finite Element Formulation For Vector Field Problems - Linear ElasticityDocumento33 pagineFinite Element Formulation For Vector Field Problems - Linear Elasticity22ebook22Nessuna valutazione finora
- Linear Vs Nonlinera Alysis in FEADocumento8 pagineLinear Vs Nonlinera Alysis in FEAMamush GslasieNessuna valutazione finora
- Strand7 - Buckling Analysis - Linear Vs NonlinearDocumento5 pagineStrand7 - Buckling Analysis - Linear Vs Nonlinearaktc100% (1)
- Understanding Geometric NonlinearitiesDocumento4 pagineUnderstanding Geometric NonlinearitiesPramod KulkarniNessuna valutazione finora
- Linear and Nonlinear Buckling in FEADocumento11 pagineLinear and Nonlinear Buckling in FEAAnonymous umabEI6Nessuna valutazione finora
- Nonlinear AnalysisDocumento38 pagineNonlinear AnalysisNarendra PalandeNessuna valutazione finora
- What Is The Difference Between Linear and Nonlinear Analysis?Documento15 pagineWhat Is The Difference Between Linear and Nonlinear Analysis?JammiNessuna valutazione finora
- Progressive Collapse ModellingDocumento2 pagineProgressive Collapse ModellingManjari ArasadaNessuna valutazione finora
- 19-ME-47 FEM Lecture 5 AssignmentDocumento3 pagine19-ME-47 FEM Lecture 5 AssignmentHassan AmeerNessuna valutazione finora
- Session 03 C1T3 Causes of NonlinearityDocumento24 pagineSession 03 C1T3 Causes of NonlinearitysandipNessuna valutazione finora
- PowerPoint PresentationDocumento65 paginePowerPoint PresentationMRIDUL SINGLANessuna valutazione finora
- Matrix Analysis of Plane and Space Frames - Devdas MenonDocumento196 pagineMatrix Analysis of Plane and Space Frames - Devdas MenonnataliaNessuna valutazione finora
- Implications of Vertical Mass Modeling Errors On 2D Dynamic Structural AnalysisDocumento19 pagineImplications of Vertical Mass Modeling Errors On 2D Dynamic Structural AnalysisEd SixzeroeightNessuna valutazione finora
- CE2351 SA 2 Lecture NotesDocumento89 pagineCE2351 SA 2 Lecture NotesKarthik PalaniswamyNessuna valutazione finora
- Slope Deflection MethodDocumento117 pagineSlope Deflection Methodann torralba71% (7)
- Autodesk Nastran 2022 Nonlinear Analysis HandbookDocumento2 pagineAutodesk Nastran 2022 Nonlinear Analysis HandbookDanNessuna valutazione finora
- Plastic Analysis PresnetationDocumento123 paginePlastic Analysis PresnetationMisganaw YeshiwasNessuna valutazione finora
- Concept: Understanding SingularitiesDocumento2 pagineConcept: Understanding SingularitiesPraveen SreedharanNessuna valutazione finora
- Autodesk Nastran For Inventor: Unlocking Nonlinear Analysis: Learning ObjectivesDocumento17 pagineAutodesk Nastran For Inventor: Unlocking Nonlinear Analysis: Learning ObjectivesGilmar MenegottoNessuna valutazione finora
- Analysis of Shell StructureDocumento37 pagineAnalysis of Shell StructureDave Mark AtendidoNessuna valutazione finora
- 1.1 Motivation: Chapter 1: IntroductionDocumento17 pagine1.1 Motivation: Chapter 1: IntroductionVenkatesh VakucherlaNessuna valutazione finora
- General Problems in Solid Mechanics and Non-Linearity: $finite Deformation Occurs. inDocumento21 pagineGeneral Problems in Solid Mechanics and Non-Linearity: $finite Deformation Occurs. inwearplayNessuna valutazione finora
- Stress ConcentrationsDocumento0 pagineStress Concentrations777894292Nessuna valutazione finora
- Fea - Ae 2017 PDFDocumento55 pagineFea - Ae 2017 PDFritastoicaNessuna valutazione finora
- ColumnsDocumento5 pagineColumnsayalwNessuna valutazione finora
- Constitutive Models RelationsDocumento32 pagineConstitutive Models RelationsMohamed SalahNessuna valutazione finora
- What Is Fixed SupportDocumento7 pagineWhat Is Fixed SupportvshapiroNessuna valutazione finora
- Case StudyDocumento7 pagineCase StudyFrances Louise MarceloNessuna valutazione finora
- Types of Damping 1. Viscous DampingDocumento6 pagineTypes of Damping 1. Viscous DampingZandro GagoteNessuna valutazione finora
- Plastic Analysis of StructuresDocumento26 paginePlastic Analysis of Structuresomar sayedNessuna valutazione finora
- Ce2351 Lecture NotesDocumento82 pagineCe2351 Lecture Notesapi-297121029Nessuna valutazione finora
- Buckling - Wikipedia, The Free EncyclopediaDocumento12 pagineBuckling - Wikipedia, The Free EncyclopediazidaaanNessuna valutazione finora
- SVT Collge of Engg. Structure II Lecture Notes..1245Documento38 pagineSVT Collge of Engg. Structure II Lecture Notes..1245Shams KhattakNessuna valutazione finora
- Esdep WG 8Documento19 pagineEsdep WG 8giuseppeNessuna valutazione finora
- Bahan Ansys DikaDocumento152 pagineBahan Ansys DikaRandika SudarmaNessuna valutazione finora
- Matrix Analysis of Beams and GridsDocumento28 pagineMatrix Analysis of Beams and GridsAnonymous 1HFV185Sl4Nessuna valutazione finora
- Lab Report 2 - Structural StudiesDocumento15 pagineLab Report 2 - Structural StudiesKAR WEI LEENessuna valutazione finora
- Pandeo Dinamico LibroDocumento39 paginePandeo Dinamico Libro6541646Nessuna valutazione finora
- Lec 25Documento31 pagineLec 25XetecNessuna valutazione finora
- Lab 2 - Maxwell-Betti Reciprocal Theorem FinalDocumento2 pagineLab 2 - Maxwell-Betti Reciprocal Theorem FinalCarlo Santos50% (2)
- Boundary Layer Equations - Non-Dimensional EquationsDocumento8 pagineBoundary Layer Equations - Non-Dimensional Equationsmsnaghavi100% (1)
- Stress TransformationDocumento7 pagineStress TransformationVignesh WaranNessuna valutazione finora
- Review of Stress Analysis Methods for Curved Beams Under Large DeflectionDocumento27 pagineReview of Stress Analysis Methods for Curved Beams Under Large DeflectionrockmanqhNessuna valutazione finora
- CAESAR II NonconvergenceDocumento11 pagineCAESAR II NonconvergenceJohn BrindleyNessuna valutazione finora
- Hourglass IngDocumento10 pagineHourglass Ingnickhil851Nessuna valutazione finora
- Buckling Analysis of The RTG CraneDocumento9 pagineBuckling Analysis of The RTG CraneGogyNessuna valutazione finora
- Analysis MethodsDocumento6 pagineAnalysis Methodsadnan-651358Nessuna valutazione finora
- Beams Deflection - Macaulay's MethodDocumento4 pagineBeams Deflection - Macaulay's MethodYadanaNessuna valutazione finora
- Observations On Eigenvalue BucklingDocumento24 pagineObservations On Eigenvalue BucklingVenkatesh PulivarthiNessuna valutazione finora
- Stress-Strain Diagram (Curve)Documento4 pagineStress-Strain Diagram (Curve)kevinNessuna valutazione finora
- Long Term DeflectionDocumento11 pagineLong Term DeflectionUmesh PatilNessuna valutazione finora
- BucklingDocumento8 pagineBucklingalphading100% (1)
- Linear Buckling Analysis - Points To Must RememberDocumento2 pagineLinear Buckling Analysis - Points To Must RememberPraveen JainNessuna valutazione finora
- Design of Compliant MechanismsDocumento11 pagineDesign of Compliant Mechanismslp23mem4r06Nessuna valutazione finora
- MECHANICS OF STEEL STRUCTURES ASSIGNMENTDocumento19 pagineMECHANICS OF STEEL STRUCTURES ASSIGNMENTEngr MahwishNessuna valutazione finora
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsDa EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNessuna valutazione finora
- RM & IPR Model QP 22Documento1 paginaRM & IPR Model QP 22rajasekharjvNessuna valutazione finora
- How To Write Review PaperDocumento2 pagineHow To Write Review PaperTasneem Vahora100% (1)
- IHP UNIT-V ObjectivesDocumento3 pagineIHP UNIT-V ObjectivesrajasekharjvNessuna valutazione finora
- CFD Model QP22Documento3 pagineCFD Model QP22rajasekharjvNessuna valutazione finora
- Chapter 14Documento47 pagineChapter 14juanqui20Nessuna valutazione finora
- Senior Advisor Aassaaneducare 0-99082-99504: Ravichandk@Aassaan - inDocumento1 paginaSenior Advisor Aassaaneducare 0-99082-99504: Ravichandk@Aassaan - inrajasekharjvNessuna valutazione finora
- Chapter 14Documento47 pagineChapter 14juanqui20Nessuna valutazione finora
- Nonlinear Free Dynamics of A Two-Layer Composite Beam With Different Boundary Conditions (Documento1 paginaNonlinear Free Dynamics of A Two-Layer Composite Beam With Different Boundary Conditions (rajasekharjvNessuna valutazione finora
- FlexSim TPDocumento72 pagineFlexSim TPrajasekharjvNessuna valutazione finora
- Annual Calendar 2015Documento1 paginaAnnual Calendar 2015burningdreams24x7Nessuna valutazione finora
- M.tech External TimeDocumento3 pagineM.tech External TimerajasekharjvNessuna valutazione finora
- Rajasekhar AadharDocumento1 paginaRajasekhar AadharrajasekharjvNessuna valutazione finora
- Machine Design222Documento64 pagineMachine Design222rajasekharjvNessuna valutazione finora
- Reducing Effect - FullDocumento8 pagineReducing Effect - FullrajasekharjvNessuna valutazione finora
- Ijest13 05 09 050Documento8 pagineIjest13 05 09 050rajasekharjvNessuna valutazione finora
- 2 1Documento23 pagine2 1Chockalingam ChidambaramNessuna valutazione finora
- Mid-I HT & IemDocumento2 pagineMid-I HT & IemrajasekharjvNessuna valutazione finora
- Student Slides M10Documento9 pagineStudent Slides M10captainhassNessuna valutazione finora
- Engineering Mechanics Notes2222Documento100 pagineEngineering Mechanics Notes2222rajasekharjvNessuna valutazione finora
- Engineering MechanicsDocumento17 pagineEngineering MechanicsmodalaNessuna valutazione finora
- JNTU Kakinada MECH Syllabus Book 4th YearDocumento90 pagineJNTU Kakinada MECH Syllabus Book 4th Yearrao253Nessuna valutazione finora
- 6th Central Pay Commission Salary CalculatorDocumento15 pagine6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Mathematics CircleDocumento7 pagineMathematics Circleabc159753Nessuna valutazione finora
- Mathematics CircleDocumento7 pagineMathematics Circleabc159753Nessuna valutazione finora
- GATE 2014 Exam Slot Analysis by SubjectDocumento1 paginaGATE 2014 Exam Slot Analysis by SubjectrajasekharjvNessuna valutazione finora
- Unconventional Manufacturing ProcessesDocumento8 pagineUnconventional Manufacturing ProcessestfortazNessuna valutazione finora
- Ijest13 05 09 050Documento8 pagineIjest13 05 09 050rajasekharjvNessuna valutazione finora
- 7Documento14 pagine7rajasekharjvNessuna valutazione finora
- Join SJVN Limited for career opportunities in growing organisationDocumento6 pagineJoin SJVN Limited for career opportunities in growing organisationVineet PandeyNessuna valutazione finora
- Professional Practice ManagementDocumento3 pagineProfessional Practice ManagementMohit GuptaNessuna valutazione finora
- MRO Accreditation MC186 - For PostingDocumento5 pagineMRO Accreditation MC186 - For PostingNairdna P Led OirasorNessuna valutazione finora
- Competency Log EC-12 Interactive ChartDocumento24 pagineCompetency Log EC-12 Interactive ChartNathan MeeceNessuna valutazione finora
- Decan Chart - WikipediaDocumento8 pagineDecan Chart - WikipediaPriestess Cynthia100% (2)
- 40k Rogue Trader VehiclesDocumento12 pagine40k Rogue Trader VehiclesLewis Holloway100% (2)
- Micropropagation and Microbes DocumentDocumento20 pagineMicropropagation and Microbes DocumentRavneet KaurNessuna valutazione finora
- StarbucksDocumento9 pagineStarbucksallen1191919Nessuna valutazione finora
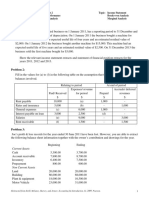
- Income Statement TutorialDocumento5 pagineIncome Statement TutorialKhiren MenonNessuna valutazione finora
- JNE Hybrid - PACKING LISTDocumento1 paginaJNE Hybrid - PACKING LISTsinta lestariNessuna valutazione finora
- Dyes and ChemicalDocumento8 pagineDyes and Chemicaldanyalkamal69Nessuna valutazione finora
- Magic's Danganronpa Kirigiri Volume 7 English TranslationDocumento321 pagineMagic's Danganronpa Kirigiri Volume 7 English TranslationZakDJNessuna valutazione finora
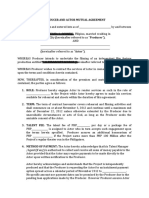
- Producer and Actor Mutual AgreementDocumento3 pagineProducer and Actor Mutual AgreementKrishNessuna valutazione finora
- Site Analysis SlidesDocumento34 pagineSite Analysis Slidesabanoub saeedNessuna valutazione finora
- Practice Set 4 DEM GSCM 2022Documento6 paginePractice Set 4 DEM GSCM 2022Romit BanerjeeNessuna valutazione finora
- Photopia User's GuideDocumento307 paginePhotopia User's GuideJesus VNessuna valutazione finora
- Dwnload Full Manufacturing Engineering and Technology 7th Edition Kalpakjian Solutions Manual PDFDocumento15 pagineDwnload Full Manufacturing Engineering and Technology 7th Edition Kalpakjian Solutions Manual PDFkhondvarletrycth100% (8)
- Vol II Tech Spec Sct1367Documento490 pagineVol II Tech Spec Sct1367ashish.mathur1Nessuna valutazione finora
- Datasheet-Pallet Scanning SystemDocumento3 pagineDatasheet-Pallet Scanning SystemSergio Tarancón GabásNessuna valutazione finora
- Startup Due Diligence ChecklistDocumento2 pagineStartup Due Diligence ChecklistSarim Saleheen LariNessuna valutazione finora
- Alpha3D: Mobile Mapping SolutionDocumento4 pagineAlpha3D: Mobile Mapping SolutionJunior Panta BalderaNessuna valutazione finora
- Ancient Greece - Unit PlanDocumento7 pagineAncient Greece - Unit PlanCosti TsakNessuna valutazione finora
- Latest Indian HR ListDocumento27 pagineLatest Indian HR Listrahulplacements100% (2)
- What You Need To Know About Association Dues: Trusted Real Estate DeveloperDocumento10 pagineWhat You Need To Know About Association Dues: Trusted Real Estate Developerced100% (1)
- Soil Components: The Role of Air and Water in Soil Pore SpacesDocumento9 pagineSoil Components: The Role of Air and Water in Soil Pore SpacesJohn Lester AlforteNessuna valutazione finora
- Tle-Computer Systems SERVICING (Grade 10) : First Quarter - Module 1 Elements of ComputerDocumento9 pagineTle-Computer Systems SERVICING (Grade 10) : First Quarter - Module 1 Elements of ComputerQuerl Manzano SarabiaNessuna valutazione finora
- Fresh MBA graduate seeking marketing opportunitiesDocumento1 paginaFresh MBA graduate seeking marketing opportunitiesPari RastogiNessuna valutazione finora
- 100 Song ChallengeDocumento3 pagine100 Song ChallengeChristina KnightsNessuna valutazione finora
- Folletos de BibliotecaDocumento2 pagineFolletos de BibliotecaCFBISDNessuna valutazione finora
- GateWay To Arabic Book 1 (A)Documento69 pagineGateWay To Arabic Book 1 (A)Mohamed Ali100% (1)
- 21 Card CounterDocumento56 pagine21 Card CounterRosa Meltrozo100% (2)