Potrebbero piacerti anche
- Follicular StudyDocumento2 pagineFollicular StudyHarsha Vijaykumar0% (1)
- Abdomen Male AdultDocumento1 paginaAbdomen Male AdultHarsha VijaykumarNessuna valutazione finora
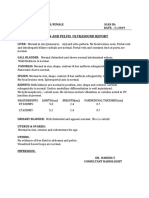
- Pelvis ScanDocumento1 paginaPelvis ScanHarsha VijaykumarNessuna valutazione finora
- Abdomen Male PaediatricDocumento1 paginaAbdomen Male PaediatricHarsha VijaykumarNessuna valutazione finora
- Madhan Knee JointDocumento1 paginaMadhan Knee JointHarsha VijaykumarNessuna valutazione finora
- November 2019Documento61 pagineNovember 2019Harsha VijaykumarNessuna valutazione finora
- Abdomen Female PeadiatricDocumento1 paginaAbdomen Female PeadiatricHarsha Vijaykumar100% (1)
- Rakshitha 2562170 86748 4201379 1 365 18776Documento1 paginaRakshitha 2562170 86748 4201379 1 365 18776Harsha VijaykumarNessuna valutazione finora
- NT and NB Ultrasonography Report: Fetal ParametersDocumento2 pagineNT and NB Ultrasonography Report: Fetal ParametersHarsha VijaykumarNessuna valutazione finora
- ProHealth Prosal FormDocumento7 pagineProHealth Prosal FormHarsha VijaykumarNessuna valutazione finora
- Abdomen Female AdultDocumento2 pagineAbdomen Female AdultHarsha Vijaykumar100% (1)
- November PHC DoubleDocumento8 pagineNovember PHC DoubleHarsha VijaykumarNessuna valutazione finora
- C V M - JulyDocumento46 pagineC V M - JulyHarsha VijaykumarNessuna valutazione finora
- The Hidden Tools of Comedy The Serious Business of Being Funny PDFDocumento190 pagineThe Hidden Tools of Comedy The Serious Business of Being Funny PDFMina89% (18)
- Shobha TMTDocumento1 paginaShobha TMTHarsha VijaykumarNessuna valutazione finora
- DNB PapersDocumento45 pagineDNB PapersHarsha VijaykumarNessuna valutazione finora
- AudiometryDocumento1 paginaAudiometryHarsha VijaykumarNessuna valutazione finora
- Nasopharynx NormalDocumento2 pagineNasopharynx NormalHarsha VijaykumarNessuna valutazione finora
- Name Corrections Form 12012015Documento1 paginaName Corrections Form 12012015Praveena VemulaNessuna valutazione finora
- Scrotal Wall LesionsDocumento15 pagineScrotal Wall LesionsHarsha VijaykumarNessuna valutazione finora
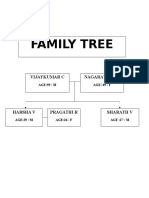
- Family TreeDocumento1 paginaFamily TreeHarsha VijaykumarNessuna valutazione finora
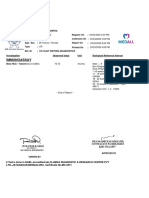
- B ReportDocumento1 paginaB ReportHarsha VijaykumarNessuna valutazione finora
- Radiation Safety for Medical StudentsDocumento27 pagineRadiation Safety for Medical StudentsHarsha VijaykumarNessuna valutazione finora
- Radiation Protection: Organizations, Standards, and PhilosophyDocumento22 pagineRadiation Protection: Organizations, Standards, and PhilosophyHarsha VijaykumarNessuna valutazione finora
- MediastinumDocumento10 pagineMediastinumHarsha VijaykumarNessuna valutazione finora
- A Study on the Dimensions and Benefits of Spiritual IntelligenceDocumento18 pagineA Study on the Dimensions and Benefits of Spiritual IntelligenceHarsha Vijaykumar100% (1)
- Radiation Protection: Organizations, Standards, and PhilosophyDocumento22 pagineRadiation Protection: Organizations, Standards, and PhilosophyHarsha VijaykumarNessuna valutazione finora
- Intex DRDocumento23 pagineIntex DRHarsha VijaykumarNessuna valutazione finora
- Radiation Safety for Medical StudentsDocumento27 pagineRadiation Safety for Medical StudentsHarsha VijaykumarNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Igcse 33 LightwavesDocumento36 pagineIgcse 33 LightwavesMuhammad Ahsan Ali KharalNessuna valutazione finora
- How To Design A Spectrometer: Alexander ScheelineDocumento16 pagineHow To Design A Spectrometer: Alexander ScheelineYongJun ChoNessuna valutazione finora
- Correction Methods for Aphakia Including IOL ImplantationDocumento12 pagineCorrection Methods for Aphakia Including IOL Implantationankur_1Nessuna valutazione finora
- Wave PropertiesDocumento122 pagineWave PropertiesschlemielzNessuna valutazione finora
- Quiz 4Documento13 pagineQuiz 4Hân BảoNessuna valutazione finora
- KS3 Science Light and Sound SummaryDocumento11 pagineKS3 Science Light and Sound SummaryCinara RahimovaNessuna valutazione finora
- Chapter 11 Human Eye and Colourful World NoteDocumento13 pagineChapter 11 Human Eye and Colourful World NoteJay MakiNessuna valutazione finora
- Notes of 10th Cbse Human EyeDocumento7 pagineNotes of 10th Cbse Human EyeAvichal TatuNessuna valutazione finora
- Physics: Crash Course For JEE Main 2020Documento16 paginePhysics: Crash Course For JEE Main 2020Ayush SharmaNessuna valutazione finora
- Light Physics NotesDocumento83 pagineLight Physics NotesNguyen NguyenNessuna valutazione finora
- NMAT Reviewer Geometrical OpticsDocumento37 pagineNMAT Reviewer Geometrical Opticsmannypot83% (12)
- Digital Marketing PlanDocumento16 pagineDigital Marketing PlanMondalo, Stephanie B.Nessuna valutazione finora
- A Detailed Lesson Plan in Teaching ScienceDocumento7 pagineA Detailed Lesson Plan in Teaching ScienceJonel Barruga100% (3)
- Integrated Science Grade 10 Weeks 1-5 - Term 3Documento52 pagineIntegrated Science Grade 10 Weeks 1-5 - Term 3Daniel DowdingNessuna valutazione finora
- Neet 2018Documento14 pagineNeet 2018ezio auditoreNessuna valutazione finora
- Bechamp Was Right All AlongDocumento9 pagineBechamp Was Right All AlongYamabushi100% (3)
- 4864.21 - Optics System 2Documento39 pagine4864.21 - Optics System 2Edgar Jose Aponte MartinezNessuna valutazione finora
- QUE 1 TestDocumento22 pagineQUE 1 TestKrishnaKanthNessuna valutazione finora
- 05 Lens Types Multifocals PDFDocumento10 pagine05 Lens Types Multifocals PDFHasan AnsariNessuna valutazione finora
- Physics Study Notes Igcse EdexcelDocumento39 paginePhysics Study Notes Igcse EdexcelAhmed Khalil75% (4)
- Assignment 3 Refractive Index Jeffy Kuriakose Thomas 21mdt002Documento9 pagineAssignment 3 Refractive Index Jeffy Kuriakose Thomas 21mdt002jeffyNessuna valutazione finora
- RainbowDocumento15 pagineRainbowkhairun nisa'Nessuna valutazione finora
- Presentation OPTIX With Devices en v.4.5Documento82 paginePresentation OPTIX With Devices en v.4.5GagovNessuna valutazione finora
- Non Imaging Fresnel Lenses Design and Performance of Solar ConcentartorDocumento278 pagineNon Imaging Fresnel Lenses Design and Performance of Solar ConcentartorYoya LawiNessuna valutazione finora
- Course: Geometrical Optics: Presented by Kailash SharmaDocumento70 pagineCourse: Geometrical Optics: Presented by Kailash SharmaIITCracke JyothirNessuna valutazione finora
- Homework 2 Chapt. 23: SolveDocumento4 pagineHomework 2 Chapt. 23: SolveMohammed AssadNessuna valutazione finora
- Biprism (Manual)Documento9 pagineBiprism (Manual)Aditya SahaiNessuna valutazione finora
- Geometric Optics ExplainedDocumento23 pagineGeometric Optics ExplainedanubhavmaheshwariNessuna valutazione finora
- Test Paper Batch: XIIDocumento3 pagineTest Paper Batch: XIIShaDNessuna valutazione finora
- Cot 1 Science 8 Sy 2019 2020Documento6 pagineCot 1 Science 8 Sy 2019 2020Cristian Portugal100% (1)