Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Mazda Protege 1996Documento36 pagineMazda Protege 1996ErasmoNieves100% (4)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- FAQ's in NetworkingDocumento1 paginaFAQ's in NetworkingPuspala ManojkumarNessuna valutazione finora
- Data StructuresDocumento2 pagineData StructuresAbhiNessuna valutazione finora
- C++ QuestionsDocumento31 pagineC++ QuestionsabhishekmanuNessuna valutazione finora
- C & C++Documento11 pagineC & C++AbhiNessuna valutazione finora
- DBMS CONCEPTS: KEY TERMS AND NORMALIZATIONDocumento5 pagineDBMS CONCEPTS: KEY TERMS AND NORMALIZATIONRishi Raj K0% (1)
- C Language SlideshowDocumento20 pagineC Language Slideshowapi-3735476100% (3)
- Coding and DecodingDocumento9 pagineCoding and DecodingPuspala ManojkumarNessuna valutazione finora
- Core JavaDocumento16 pagineCore JavaPuspala Manojkumar100% (1)
- Concepts On OsDocumento3 pagineConcepts On OsPuspala ManojkumarNessuna valutazione finora
- CodesDocumento12 pagineCodesPuspala ManojkumarNessuna valutazione finora
- C Interview QuestionsDocumento34 pagineC Interview QuestionschandanlNessuna valutazione finora
- CDocumento11 pagineCPuspala ManojkumarNessuna valutazione finora
- Q ND Ans On AwtDocumento9 pagineQ ND Ans On Awtapi-19742918Nessuna valutazione finora
- Questions On CDocumento8 pagineQuestions On Capi-3844691Nessuna valutazione finora
- SwingsDocumento8 pagineSwingsapi-3797938Nessuna valutazione finora
- ThreadingDocumento3 pagineThreadingPuspala Manojkumar0% (1)
- NetworkingDocumento5 pagineNetworkingapi-3797938Nessuna valutazione finora
- AppletsDocumento2 pagineAppletsapi-3797938Nessuna valutazione finora
- JtaDocumento3 pagineJtaapi-3797938Nessuna valutazione finora
- JSPDocumento5 pagineJSPPuspala ManojkumarNessuna valutazione finora
- J2EEDocumento2 pagineJ2EEapi-3797938Nessuna valutazione finora
- JndiDocumento1 paginaJndiapi-3797938Nessuna valutazione finora
- Q ND Ans On AwtDocumento9 pagineQ ND Ans On Awtapi-19742918Nessuna valutazione finora
- JmsDocumento2 pagineJmsapi-3797938Nessuna valutazione finora
- IostreamsDocumento6 pagineIostreamsapi-3797938Nessuna valutazione finora
- Shakuntala Devi PuzzlesDocumento137 pagineShakuntala Devi PuzzlesPuspala ManojkumarNessuna valutazione finora
- Java FaqDocumento2 pagineJava FaqPuspala ManojkumarNessuna valutazione finora
- Core JavaDocumento16 pagineCore JavaPuspala Manojkumar100% (1)
- AppletsDocumento2 pagineAppletsapi-3797938Nessuna valutazione finora
- Solved Quantitative Aptitude Paper of Bank P.ODocumento6 pagineSolved Quantitative Aptitude Paper of Bank P.Oapi-2640304889% (18)
- Groundsmaster 223-D: Parts Catalog Traction UnitDocumento56 pagineGroundsmaster 223-D: Parts Catalog Traction UnitEnrique Fdz MNessuna valutazione finora
- Electric Lift Installation RequirementsDocumento3 pagineElectric Lift Installation RequirementsDaveNessuna valutazione finora
- BC 300 ManualDocumento24 pagineBC 300 ManualFreddyo59100% (1)
- Cx2000 Ac Drive CatalogueDocumento24 pagineCx2000 Ac Drive CataloguepandurangaNessuna valutazione finora
- Ariel Coronel CV PDFDocumento4 pagineAriel Coronel CV PDFariel coronelNessuna valutazione finora
- DAS Price List 2011 04Documento14 pagineDAS Price List 2011 04Mavi ErtunaNessuna valutazione finora
- Burn-In 101Documento4 pagineBurn-In 101api-281858981Nessuna valutazione finora
- Portfolio in TleDocumento16 paginePortfolio in TleAileen Javines50% (2)
- 8i845gvmrz Ac Rev.1.0Documento34 pagine8i845gvmrz Ac Rev.1.0Cid santosNessuna valutazione finora
- Supercap Leveler PDFDocumento11 pagineSupercap Leveler PDFCazimir BostanNessuna valutazione finora
- Diodes Inc - Library - Components - List PDFDocumento5 pagineDiodes Inc - Library - Components - List PDFLuciaNessuna valutazione finora
- Catalogo Multi SplitsDocumento37 pagineCatalogo Multi SplitsDarwin RojasNessuna valutazione finora
- Hyundai VENUE SUV BrochureDocumento8 pagineHyundai VENUE SUV BrochurecdcdscdsNessuna valutazione finora
- Automatic H2o Pump ControllerDocumento14 pagineAutomatic H2o Pump ControllerSowham ChatterjeeNessuna valutazione finora
- 4 To 20 Ma Remote Indicator: Instructions, Operation Maintenance ManualDocumento24 pagine4 To 20 Ma Remote Indicator: Instructions, Operation Maintenance ManualsancakemreNessuna valutazione finora
- Radiator Connection MethodsDocumento1 paginaRadiator Connection Methodsgox458Nessuna valutazione finora
- Steca PV Off Grid Catalogue 2014-2015 enDocumento39 pagineSteca PV Off Grid Catalogue 2014-2015 entunznathNessuna valutazione finora
- V47 Components From Crank To Link Head (Conical) : Crank and Crank PlateDocumento4 pagineV47 Components From Crank To Link Head (Conical) : Crank and Crank PlatebalaNessuna valutazione finora
- RTS5138 One-LUN USB 2.0 Card Reader Controller DatasheetDocumento13 pagineRTS5138 One-LUN USB 2.0 Card Reader Controller Datasheetari factoryNessuna valutazione finora
- Argonite TANQUESDocumento8 pagineArgonite TANQUESMartha BernalNessuna valutazione finora
- Yukon 6.2Documento8 pagineYukon 6.2Dany AlvaradoNessuna valutazione finora
- Repair KeretaDocumento17 pagineRepair KeretaIefa Shafie100% (3)
- X11SWN-H/-E/-L/-C X11SWN-H/-E/-L/-C-WOHS: User ManualDocumento108 pagineX11SWN-H/-E/-L/-C X11SWN-H/-E/-L/-C-WOHS: User ManualMario Arancibia SepulvedaNessuna valutazione finora
- PLF-76T Service ManualDocumento40 paginePLF-76T Service Manualapi-3711045100% (1)
- Fieldbus V2 20130207Documento110 pagineFieldbus V2 20130207Pedro BortotNessuna valutazione finora
- Clipper Wind PDFDocumento13 pagineClipper Wind PDFyanaziNessuna valutazione finora
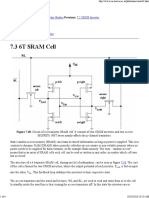
- 7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterDocumento4 pagine7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterGowtham SpNessuna valutazione finora
- The Perfect Tool To Expand Your Shop'S Tire Business!: Mdmax Tpms Diagnostic Tool Obdii Module For Maxtpms $447Documento16 pagineThe Perfect Tool To Expand Your Shop'S Tire Business!: Mdmax Tpms Diagnostic Tool Obdii Module For Maxtpms $447Jamie MiddletonNessuna valutazione finora
- NEW SO# Draft: No. Description Part NumberDocumento5 pagineNEW SO# Draft: No. Description Part NumberLayth S. ChalloobNessuna valutazione finora