Potrebbero piacerti anche
- Calefactores murales y de suelo detalles y especificacionesDocumento12 pagineCalefactores murales y de suelo detalles y especificacioneswuoruk0% (1)
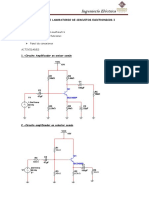
- Amplificador en Base Colector y Emisor Comun 7 PDFDocumento10 pagineAmplificador en Base Colector y Emisor Comun 7 PDFAlex HenrryNessuna valutazione finora
- NTP 827Documento4 pagineNTP 827PedroSaizMalfazNessuna valutazione finora
- TecnologíaDocumento2 pagineTecnología321Nessuna valutazione finora
- DeporteDocumento1 paginaDeporte321Nessuna valutazione finora
- DFo 1 2 SG EspDocumento25 pagineDFo 1 2 SG EspElizabeth CruzNessuna valutazione finora
- ACCESK1LTR ManualDocumento2 pagineACCESK1LTR Manual321Nessuna valutazione finora
- HistoriaDocumento3 pagineHistoria321Nessuna valutazione finora
- Img 20140925 0004Documento1 paginaImg 20140925 0004321Nessuna valutazione finora
- MB160Documento2 pagineMB160LuisRoseroNessuna valutazione finora
- ArteDocumento1 paginaArteMariana SuárezNessuna valutazione finora
- MúsicaDocumento2 pagineMúsica321Nessuna valutazione finora
- Manual de Usuario ZktecoDocumento46 pagineManual de Usuario ZktecojuanNessuna valutazione finora
- Manual de Mantencion Rapidad HuaweiDocumento15 pagineManual de Mantencion Rapidad HuaweiMiguel Angel Sepulveda SanchezNessuna valutazione finora
- Manual de Operación e Instalación Panel de Control Alarma de IncendioDocumento128 pagineManual de Operación e Instalación Panel de Control Alarma de IncendioAndres Felipe Muñoz ANessuna valutazione finora
- Elementos de Diseño de Subestaciones - HarperDocumento594 pagineElementos de Diseño de Subestaciones - Harperyad595693% (15)
- ACCESSK1LTRDocumento1 paginaACCESSK1LTR321Nessuna valutazione finora
- Analisis de Sistemas Lineales - Mario SalgadoDocumento524 pagineAnalisis de Sistemas Lineales - Mario SalgadoAwert789100% (1)
- Energia Solar Refrigeracion DomesticaDocumento4 pagineEnergia Solar Refrigeracion DomesticaaamesmNessuna valutazione finora
- Equipo, Guias y Torres para MicroondasDocumento6 pagineEquipo, Guias y Torres para Microondas321Nessuna valutazione finora
- Analisis e Instalacion de Ventiladores TechoDocumento6 pagineAnalisis e Instalacion de Ventiladores Techogavino_48Nessuna valutazione finora
- Diseno Electronico AnalogoDocumento260 pagineDiseno Electronico AnalogoJuan ArancibiaNessuna valutazione finora
- RadiocomunicacionesDocumento34 pagineRadiocomunicaciones321Nessuna valutazione finora
- 06 Es Calculo-De-radioenlace Presentacion v02Documento50 pagine06 Es Calculo-De-radioenlace Presentacion v02Yanith Lisset MurciaNessuna valutazione finora
- Guía de Blindaje de ProyectosDocumento31 pagineGuía de Blindaje de Proyectos321Nessuna valutazione finora
- Antenas 1ra Edicion Ángel Cardama, Lluís Jofre, Juan Rius, Jordi Romeu, Miguel BatallerDocumento461 pagineAntenas 1ra Edicion Ángel Cardama, Lluís Jofre, Juan Rius, Jordi Romeu, Miguel Bataller321100% (3)
- Ley General de la Industria EléctricaDocumento24 pagineLey General de la Industria EléctricaAdam JohnsonNessuna valutazione finora
- Honduras Revierte Su Matriz EnergéticaDocumento2 pagineHonduras Revierte Su Matriz Energética321Nessuna valutazione finora
- Saber Electronica 002Documento64 pagineSaber Electronica 002parascoli100% (5)
- Balacco JoseDocumento74 pagineBalacco JoseMónica Báez AbdaláNessuna valutazione finora
- Conceptos EconómicosDocumento2 pagineConceptos Económicos321Nessuna valutazione finora
- Arreglo de AntenasDocumento4 pagineArreglo de Antenas321Nessuna valutazione finora
- Comparación de Las Tarjetas de Video NVIDIA GeForce GT630M y La NVIDIA GeForce GT680MDocumento6 pagineComparación de Las Tarjetas de Video NVIDIA GeForce GT630M y La NVIDIA GeForce GT680M321Nessuna valutazione finora
- Ses. 1 - Introducción Al Mundo de La FísicaDocumento7 pagineSes. 1 - Introducción Al Mundo de La FísicaIsmael TelloNessuna valutazione finora
- Dialogos Demostracion FormacionDocumento3 pagineDialogos Demostracion FormacionFloricelavelazquezNessuna valutazione finora
- Preparación de soluciones químicasDocumento7 paginePreparación de soluciones químicasCristian PuentesNessuna valutazione finora
- Sierra CaladoraDocumento10 pagineSierra CaladoraRowina Wamani100% (1)
- EcuaciónesDocumento21 pagineEcuaciónesСистемаNessuna valutazione finora
- Transmisión Por Correas - Apuntes de Ingeniería Mecánica 02Documento3 pagineTransmisión Por Correas - Apuntes de Ingeniería Mecánica 02jorge1947Nessuna valutazione finora
- Fisica Nuclear IDocumento2 pagineFisica Nuclear IHernan CVNessuna valutazione finora
- Informe Previo de Electrotecnia N 3 FIEE UNMSMDocumento12 pagineInforme Previo de Electrotecnia N 3 FIEE UNMSMerickNessuna valutazione finora
- Conicas en R3Documento11 pagineConicas en R3Miguel Angel Castañeda SamanamúNessuna valutazione finora
- Cap - Iv.tipos de PerforadorasDocumento35 pagineCap - Iv.tipos de PerforadorasJonathan VilcaNessuna valutazione finora
- Solidos Platonicos Genesis PDFDocumento22 pagineSolidos Platonicos Genesis PDFGreivanNessuna valutazione finora
- Determinación Del Punto de EbulliciónDocumento9 pagineDeterminación Del Punto de EbulliciónJhordy Maycol Rodas QuirozNessuna valutazione finora
- Reporte Laboratorio 1 Electronica 2Documento9 pagineReporte Laboratorio 1 Electronica 2Ronny DiazNessuna valutazione finora
- Ejercicios Vectores 4ºDocumento4 pagineEjercicios Vectores 4ºusuario1983Nessuna valutazione finora
- Daño de FormacionDocumento21 pagineDaño de FormacionRosita Liliana MuñozNessuna valutazione finora
- Peso específico y absorción del agregado finoDocumento5 paginePeso específico y absorción del agregado finoAriel Nina Choque0% (1)
- 25-26 Enrique Escobedo Hernandez - Luis Alberto Zamora CamposDocumento191 pagine25-26 Enrique Escobedo Hernandez - Luis Alberto Zamora CamposFidel RamonNessuna valutazione finora
- Manual de Química: Identificación de material e instrumentosDocumento44 pagineManual de Química: Identificación de material e instrumentosNATALY JOHANA MICAN PORTILLANessuna valutazione finora
- ELECTROEROSIONADODocumento20 pagineELECTROEROSIONADOMafe RojasNessuna valutazione finora
- Informe III-IV Compuestos Coordinación 2018Documento11 pagineInforme III-IV Compuestos Coordinación 2018Daniel100% (1)
- BiofisicaDocumento8 pagineBiofisicaTatihana Zuñiga FernàndezNessuna valutazione finora
- INFORME Modificacion ExpedienteDocumento7 pagineINFORME Modificacion ExpedienteRonald Chauca HuamanNessuna valutazione finora
- Matamoscas eléctrónico: circuito flybackDocumento4 pagineMatamoscas eléctrónico: circuito flybackAnonymous iTHJZaFR0ZNessuna valutazione finora
- Sintesis de Aspirina Wai WahDocumento7 pagineSintesis de Aspirina Wai WahCristian BarriosNessuna valutazione finora
- LIBRODocumento212 pagineLIBROAlejandra SuarezNessuna valutazione finora
- Influencia de la zeolita de Cabo de Gata en morteros de cementoDocumento20 pagineInfluencia de la zeolita de Cabo de Gata en morteros de cementoRoux GandyNessuna valutazione finora
- SESION 02 - EjerciciosDocumento18 pagineSESION 02 - EjerciciosPatricia PomaNessuna valutazione finora