Potrebbero piacerti anche
- Difference Equations in Normed Spaces: Stability and OscillationsDa EverandDifference Equations in Normed Spaces: Stability and OscillationsNessuna valutazione finora
- Root LocusDocumento5 pagineRoot LocusJinwoo JungNessuna valutazione finora
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsDa EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNessuna valutazione finora
- Week 9A & 9B - Online Ckasses - S2020Documento42 pagineWeek 9A & 9B - Online Ckasses - S2020Muhammad Tayyab YousafzaiNessuna valutazione finora
- Lecture - 2 - Digital Control SystemDocumento77 pagineLecture - 2 - Digital Control Systemtadepeace23Nessuna valutazione finora
- Root Locus PDFDocumento18 pagineRoot Locus PDFUM ZaidNessuna valutazione finora
- Root Locus TechniqueDocumento43 pagineRoot Locus TechniqueAzeem SarwarNessuna valutazione finora
- Report Title: Design Methods and Application of Analog FiltersDocumento15 pagineReport Title: Design Methods and Application of Analog FiltersSara AhmedNessuna valutazione finora
- 2428-المحاضرة13 - اسس هندسة السيطرةDocumento15 pagine2428-المحاضرة13 - اسس هندسة السيطرةET201004 Md Imam HossainNessuna valutazione finora
- Control Systems - Root LocusDocumento10 pagineControl Systems - Root LocussajedaliNessuna valutazione finora
- CS Mod4@AzDOCUMENTS - inDocumento21 pagineCS Mod4@AzDOCUMENTS - insssNessuna valutazione finora
- Evans1950 PDFDocumento4 pagineEvans1950 PDFRoyer Guerra huamanNessuna valutazione finora
- Chapter 7: The Root Locus MethodDocumento13 pagineChapter 7: The Root Locus MethodPankaj Kumar MehtaNessuna valutazione finora
- Control System Synthesis by Root Locus MethodDocumento6 pagineControl System Synthesis by Root Locus MethodcastrojpNessuna valutazione finora
- Control System Synthesis by Root Locus PDFDocumento4 pagineControl System Synthesis by Root Locus PDFSohail AhmedNessuna valutazione finora
- Control Systems - The Last Basic Course, PT IIIDocumento13 pagineControl Systems - The Last Basic Course, PT IIIabhineet sharmaNessuna valutazione finora
- Control Manual Lab 10Documento14 pagineControl Manual Lab 10Hussain HadiNessuna valutazione finora
- Homework 9 TCDocumento6 pagineHomework 9 TCSebastián TorresNessuna valutazione finora
- Unit 03Documento82 pagineUnit 03MD SHAHRIARMAHMUDNessuna valutazione finora
- Izmir University of Economics Eee 311 Laboratory Assignment IvDocumento3 pagineIzmir University of Economics Eee 311 Laboratory Assignment IvPandimadevi GanesanNessuna valutazione finora
- Pole-Zero-Gain Filters: Chapter InsightDocumento13 paginePole-Zero-Gain Filters: Chapter InsightAldon JimenezNessuna valutazione finora
- Control System AssignmentDocumento27 pagineControl System AssignmentCrescent MnyamaNessuna valutazione finora
- Root Locus Method 2Documento33 pagineRoot Locus Method 2Umasankar ChilumuriNessuna valutazione finora
- Lab No. 4-System Stabilty Using Routh Table, Root LocusDocumento4 pagineLab No. 4-System Stabilty Using Routh Table, Root LocusAshno KhanNessuna valutazione finora
- Root LocusDocumento26 pagineRoot LocusMuhammad Tariq SadiqNessuna valutazione finora
- Ec6405 - Control System Engineering Questions and Answers Unit - IV Stability Analysis Two MarksDocumento6 pagineEc6405 - Control System Engineering Questions and Answers Unit - IV Stability Analysis Two MarksShailaja UdtewarNessuna valutazione finora
- Control Exp 8 Student ManualDocumento7 pagineControl Exp 8 Student ManualSyed Nahid Ahmed TopuNessuna valutazione finora
- Root Locus. Root Locus - An Overview - Sciencedirect Topics. (N.D.)Documento1 paginaRoot Locus. Root Locus - An Overview - Sciencedirect Topics. (N.D.)John Louie TapecNessuna valutazione finora
- Control Lab Report Experiment No. 06Documento2 pagineControl Lab Report Experiment No. 06Nahin AminNessuna valutazione finora
- CISE 316 Control Systems Design Lab ManualDocumento78 pagineCISE 316 Control Systems Design Lab Manualnirmal_inbox100% (1)
- AppendixDocumento16 pagineAppendixSushant YadavNessuna valutazione finora
- LAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueDocumento7 pagineLAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueSanjar BeyNessuna valutazione finora
- Control Exp 03Documento10 pagineControl Exp 03nipudasNessuna valutazione finora
- Laboratory Exercise No. 6 Poles and Zeros of A Transfer FunctionDocumento10 pagineLaboratory Exercise No. 6 Poles and Zeros of A Transfer FunctionYasmin KayeNessuna valutazione finora
- FeedCon (Unit 6)Documento55 pagineFeedCon (Unit 6)Dovie MayNessuna valutazione finora
- Prestige Institute of Engineering & Science Indore (M.P.)Documento3 paginePrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNessuna valutazione finora
- Control Engineering StabilityDocumento23 pagineControl Engineering StabilityAhmad Azree OthmanNessuna valutazione finora
- Root Locus Method 2Documento33 pagineRoot Locus Method 2Patel DipenNessuna valutazione finora
- Objective: R (S) K G (S) Y (S)Documento6 pagineObjective: R (S) K G (S) Y (S)Mujtaba HusseinNessuna valutazione finora
- Linear Control Cheat SheetDocumento13 pagineLinear Control Cheat SheetOmnia Hashad92% (13)
- 2008CCS13 Root LocusDocumento100 pagine2008CCS13 Root LocusMarde Joy MercadoNessuna valutazione finora
- FLab-08 EXP8Documento8 pagineFLab-08 EXP8Carl Kevin CartijanoNessuna valutazione finora
- Root LocusDocumento12 pagineRoot LocusMukul RustagiNessuna valutazione finora
- Construction of Root LocusDocumento5 pagineConstruction of Root LocusBharathi VNessuna valutazione finora
- Electrical-Engineering Engineering Control-Systems Root-Locus-Techniques NotesDocumento23 pagineElectrical-Engineering Engineering Control-Systems Root-Locus-Techniques NotesRahul TaldaNessuna valutazione finora
- The Root Locus AnalysisDocumento56 pagineThe Root Locus AnalysisJpradha KamalNessuna valutazione finora
- L10 12root LocusDocumento50 pagineL10 12root LocusRaj PatelNessuna valutazione finora
- Root Locus TechniqueDocumento16 pagineRoot Locus TechniqueMohammad OzairNessuna valutazione finora
- System StabilityDocumento16 pagineSystem Stabilityeugeni madaNessuna valutazione finora
- B - Lecture11 Extension of The Root Locus Automatic Control SystemDocumento15 pagineB - Lecture11 Extension of The Root Locus Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- Control 05Documento27 pagineControl 05أحمد تركي كحيوشNessuna valutazione finora
- Topic:-Root Locus: Muhammad Usman L2f08bsee0674 M Tariq Waseem L2f08bsee0715Documento13 pagineTopic:-Root Locus: Muhammad Usman L2f08bsee0674 M Tariq Waseem L2f08bsee0715xenium9363Nessuna valutazione finora
- Tobler 1979 Geographical AnalysisDocumento9 pagineTobler 1979 Geographical AnalysisRafael Becemberg LippoNessuna valutazione finora
- 1437235816control Systems (K-Wiki Root Locus) PDFDocumento24 pagine1437235816control Systems (K-Wiki Root Locus) PDFRitarshiChakrabortyNessuna valutazione finora
- Klaus Sutner - de Bruijn Graphs and Linear Cellular AutomataDocumento12 pagineKlaus Sutner - de Bruijn Graphs and Linear Cellular AutomataIrokkNessuna valutazione finora
- Control SystemsDocumento94 pagineControl SystemsVaibhav DangeNessuna valutazione finora
- 11 Root Locus 1Documento5 pagine11 Root Locus 1John Karlo ReynanteNessuna valutazione finora
- Plotting Root Locus For DC Motor Position Control: M-FileDocumento12 paginePlotting Root Locus For DC Motor Position Control: M-FileEhab AL-HialyNessuna valutazione finora
- Control-Systems Lab (080-096)Documento17 pagineControl-Systems Lab (080-096)Gangula Praneeth ReddyNessuna valutazione finora
- Early Battles of IslamDocumento5 pagineEarly Battles of Islammanni12201220% (1)
- Main Ne Dhaka Doobte Dekha PDFDocumento129 pagineMain Ne Dhaka Doobte Dekha PDFmanni1220122Nessuna valutazione finora
- First Day Hands OutDocumento18 pagineFirst Day Hands Outmanni1220122Nessuna valutazione finora
- Bisection MethodDocumento20 pagineBisection Methodmanni1220122Nessuna valutazione finora
- Commonly Used Taylor SeriesDocumento4 pagineCommonly Used Taylor SeriesBob leNessuna valutazione finora
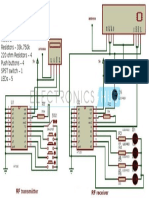
- RF Based Home Automation SystemDocumento1 paginaRF Based Home Automation Systemmanni1220122Nessuna valutazione finora
- Linear Acceleration MethodDocumento2 pagineLinear Acceleration MethodMadalina Foaie100% (3)
- Chapter-8 (Lag Lead Compensation)Documento16 pagineChapter-8 (Lag Lead Compensation)Nischal MaharjanNessuna valutazione finora
- Computer Applications in Engineering Design: Introductory LectureDocumento35 pagineComputer Applications in Engineering Design: Introductory Lecturezain aiNessuna valutazione finora
- Introduction To AI-ML-and ApplicationsDocumento115 pagineIntroduction To AI-ML-and ApplicationsMrinal SarvagyaNessuna valutazione finora
- Op 1Documento18 pagineOp 1mohammad thamerNessuna valutazione finora
- Data Science Interview Questions: Answer HereDocumento54 pagineData Science Interview Questions: Answer Hereneeraj12121Nessuna valutazione finora
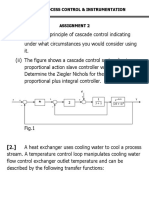
- 1.) (I) Explain The Principle of Cascade Control IndicatingDocumento7 pagine1.) (I) Explain The Principle of Cascade Control IndicatingmutencoNessuna valutazione finora
- Lecture 6 (Project Network)Documento21 pagineLecture 6 (Project Network)aron khanNessuna valutazione finora
- CASO Crecimiento PlantasDocumento12 pagineCASO Crecimiento PlantasCynthia Falcón FloresNessuna valutazione finora
- Airline Crew SchedulingDocumento12 pagineAirline Crew SchedulingMohamed MansourNessuna valutazione finora
- Math 2222 Assignment - 20 - Series (DKP and MMA)Documento2 pagineMath 2222 Assignment - 20 - Series (DKP and MMA)Nafiul Alam SnigdhoNessuna valutazione finora
- Volume IIDocumento246 pagineVolume IIathanasios niotisNessuna valutazione finora
- Class 1. Introduction To Data ScienceDocumento10 pagineClass 1. Introduction To Data ScienceFelix Gabriel Villamizar CalderinNessuna valutazione finora
- CSDocumento3 pagineCSMian Saeed RafiqueNessuna valutazione finora
- Introduction To KerasDocumento14 pagineIntroduction To Kerasouhda.medNessuna valutazione finora
- Noise Modeling and Analysis of SAR ADCsDocumento9 pagineNoise Modeling and Analysis of SAR ADCsmustafaNessuna valutazione finora
- Nils BakerDocumento11 pagineNils BakerRAVINDRA KATIYARNessuna valutazione finora
- Decision Tree Algorithm, ExplainedDocumento20 pagineDecision Tree Algorithm, ExplainedAli KhanNessuna valutazione finora
- Euler and Hamiltonian Paths and Circuits - Mathematics For The Liberal ArtsDocumento43 pagineEuler and Hamiltonian Paths and Circuits - Mathematics For The Liberal ArtsMorassa ChonaNessuna valutazione finora
- Quasi Explicit Calibration of Gatheral SVI ModelDocumento15 pagineQuasi Explicit Calibration of Gatheral SVI ModelRayan RayanNessuna valutazione finora
- Designing Machine Learning Workflows in Python Chapter4Documento38 pagineDesigning Machine Learning Workflows in Python Chapter4FgpeqwNessuna valutazione finora
- H301 PresentationDocumento21 pagineH301 PresentationA.R.Bathri NarayananNessuna valutazione finora
- Activity 2 2 - Text CompressionDocumento3 pagineActivity 2 2 - Text Compressionapi-33241279360% (5)
- PTLP 4Documento25 paginePTLP 4ray ravenNessuna valutazione finora
- 1 BUSI4489 Management Science For Decision Support Assignment 1Documento2 pagine1 BUSI4489 Management Science For Decision Support Assignment 1Joseph MainaNessuna valutazione finora
- Assignment Mba-Ii Semester 51207: Operations ResearchDocumento3 pagineAssignment Mba-Ii Semester 51207: Operations Researchanandilal dhabaiNessuna valutazione finora
- DSA Lab 6Documento10 pagineDSA Lab 6uaengineering ManzoorNessuna valutazione finora
- ODE 2023 Tutorial 1 and 2Documento2 pagineODE 2023 Tutorial 1 and 2Just EntertainmentNessuna valutazione finora
- CH E Problem 3Documento3 pagineCH E Problem 3Brayan AguilarNessuna valutazione finora
- DSP LabDocumento70 pagineDSP LabBeena ShettyNessuna valutazione finora
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Da EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Valutazione: 4 su 5 stelle4/5 (3)
- Artificial Intelligence: From Medieval Robots to Neural NetworksDa EverandArtificial Intelligence: From Medieval Robots to Neural NetworksValutazione: 4 su 5 stelle4/5 (3)
- Artificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsDa EverandArtificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsValutazione: 5 su 5 stelle5/5 (3)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Da EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Valutazione: 4 su 5 stelle4/5 (5)
- A Welder’s Handbook to Robotic ProgrammingDa EverandA Welder’s Handbook to Robotic ProgrammingValutazione: 5 su 5 stelle5/5 (3)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDa EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNessuna valutazione finora
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureDa EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureValutazione: 4.5 su 5 stelle4.5/5 (2)
- Romantic Automata: Exhibitions, Figures, OrganismsDa EverandRomantic Automata: Exhibitions, Figures, OrganismsNessuna valutazione finora
- Dark Aeon: Transhumanism and the War Against HumanityDa EverandDark Aeon: Transhumanism and the War Against HumanityValutazione: 5 su 5 stelle5/5 (1)
- The Heart and the Chip: Our Bright Future with RobotsDa EverandThe Heart and the Chip: Our Bright Future with RobotsNessuna valutazione finora
- Evil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityDa EverandEvil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityValutazione: 4.5 su 5 stelle4.5/5 (3)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceDa EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceValutazione: 5 su 5 stelle5/5 (9)
- Arduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Da EverandArduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Valutazione: 3 su 5 stelle3/5 (1)
- The Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityDa EverandThe Fourth Age: Smart Robots, Conscious Computers, and the Future of HumanityValutazione: 3.5 su 5 stelle3.5/5 (22)
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkDa EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkValutazione: 5 su 5 stelle5/5 (1)
- How to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionDa EverandHow to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionValutazione: 3.5 su 5 stelle3.5/5 (129)
- Artificial You: AI and the Future of Your MindDa EverandArtificial You: AI and the Future of Your MindValutazione: 4 su 5 stelle4/5 (3)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsDa EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNessuna valutazione finora
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessDa EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNessuna valutazione finora
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationDa EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationValutazione: 4.5 su 5 stelle4.5/5 (2)
- Create Profitable Side Hustles with Artificial IntelligenceDa EverandCreate Profitable Side Hustles with Artificial IntelligenceNessuna valutazione finora
- ChatGPT: The Future of Intelligent ConversationDa EverandChatGPT: The Future of Intelligent ConversationValutazione: 3.5 su 5 stelle3.5/5 (8)
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesDa EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesValutazione: 2.5 su 5 stelle2.5/5 (3)
- Collection of Raspberry Pi ProjectsDa EverandCollection of Raspberry Pi ProjectsValutazione: 5 su 5 stelle5/5 (1)
- Robotics: Designing the Mechanisms for Automated MachineryDa EverandRobotics: Designing the Mechanisms for Automated MachineryValutazione: 4.5 su 5 stelle4.5/5 (8)