Potrebbero piacerti anche
- Plano de Estudo Houseboat 64Documento7 paginePlano de Estudo Houseboat 64jrnelsonNessuna valutazione finora
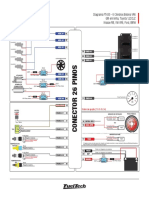
- FT450 - 6 Cil 6 Inj Bob VR6 01Documento1 paginaFT450 - 6 Cil 6 Inj Bob VR6 01William FernandesNessuna valutazione finora
- 3.tabelas e DetalhesDocumento40 pagine3.tabelas e Detalhesfnahas_bh100% (2)
- Resolucao Conama 490 de 2018 Fase P8 Feiculos PesadosDocumento1 paginaResolucao Conama 490 de 2018 Fase P8 Feiculos PesadosLeonardo SanchesNessuna valutazione finora
- Manual Mmo16e1ng e Mmo16e1ng XTDocumento93 pagineManual Mmo16e1ng e Mmo16e1ng XTMarcioNessuna valutazione finora
- ΒΔΞ - Cavalos X CilindradasDocumento2 pagineΒΔΞ - Cavalos X CilindradasNOIVODALAGOANessuna valutazione finora
- Manual XTZ PDFDocumento172 pagineManual XTZ PDFBruno CesarNessuna valutazione finora
- Potência em Regime Senoidal PermanenteDocumento39 paginePotência em Regime Senoidal PermanentePedro HenriqueNessuna valutazione finora
- Apr Manutenção EletricaDocumento3 pagineApr Manutenção EletricaCleber FonsecaNessuna valutazione finora
- Riscos Geológicos Da Cidade de OP-SobreiraDocumento15 pagineRiscos Geológicos Da Cidade de OP-SobreiraBruno BretasNessuna valutazione finora
- FORM-PO-OM-COSE-001-03 - TP FASE A Rev0Documento4 pagineFORM-PO-OM-COSE-001-03 - TP FASE A Rev0fabioNessuna valutazione finora
- Caixas Cambio Eaton Fso 4405 Aluminio PDFDocumento167 pagineCaixas Cambio Eaton Fso 4405 Aluminio PDFtelmy86% (7)
- Manual Torno Nardini AM 325-400-500-650 (Reduzido)Documento135 pagineManual Torno Nardini AM 325-400-500-650 (Reduzido)Daniel TavaresNessuna valutazione finora
- Laudo de Avaliação As 2173-2022-1Documento6 pagineLaudo de Avaliação As 2173-2022-1Jordan Pereira PereiraNessuna valutazione finora
- Proteção Contra Quedas Na ConstruçãoDocumento68 pagineProteção Contra Quedas Na ConstruçãoEduardo Schimiti100% (1)
- Novo Catálogo Zero GrauDocumento40 pagineNovo Catálogo Zero GrauBanguela Dom PedritoNessuna valutazione finora
- Introdução Ao AutoCAD 2DDocumento14 pagineIntrodução Ao AutoCAD 2DYuri X Kenny67% (15)
- UMB Informatec - Instalação e ConfiguraçãoDocumento22 pagineUMB Informatec - Instalação e ConfiguraçãoEquipamentosNessuna valutazione finora
- Cinto Trava Queda CHECK-LIST - GERALDocumento8 pagineCinto Trava Queda CHECK-LIST - GERALJeane Fernandes de BritoNessuna valutazione finora
- O Diodo LaserDocumento12 pagineO Diodo LaserpjvvsapoNessuna valutazione finora
- Apostila HIBERNATE PDFDocumento78 pagineApostila HIBERNATE PDFrodrigomichel100% (1)
- Engenharia Econômica Capítulos 1 A 4Documento110 pagineEngenharia Econômica Capítulos 1 A 4Marcelo Eduardo Benencase67% (3)
- TRILHADEIRA. WWW - Vencedoramaqtron.com - Br. Manual de InstruçãoDocumento8 pagineTRILHADEIRA. WWW - Vencedoramaqtron.com - Br. Manual de InstruçãoGustavo Santos100% (1)
- Capítulo 1 - Introdução 17 1.1 - CNC - Máquinas Ferramentas Com Comando Numérico Computadorizado 17Documento6 pagineCapítulo 1 - Introdução 17 1.1 - CNC - Máquinas Ferramentas Com Comando Numérico Computadorizado 17RNDPRADONessuna valutazione finora
- Máquina Arrancar MandiocaDocumento6 pagineMáquina Arrancar MandiocaCarlos Adalberto BehlingNessuna valutazione finora
- MODELO - TRABALHO MiguelDocumento4 pagineMODELO - TRABALHO Miguelkarina calado CorreiaNessuna valutazione finora
- Cinetica ExerciciosDocumento2 pagineCinetica ExercicioscarlostucupiNessuna valutazione finora
- Analise de MalwareDocumento17 pagineAnalise de MalwareWanderson OliveiraNessuna valutazione finora
- S 8000 GealanDocumento16 pagineS 8000 GealanLuís GuerreiroNessuna valutazione finora
- PROVADocumento4 paginePROVASiSi SilvaNessuna valutazione finora