Potrebbero piacerti anche
- Reliable Robust Flight Tracking Control: An LMI ApproachDocumento14 pagineReliable Robust Flight Tracking Control: An LMI ApproachPriyanka ChowdaryNessuna valutazione finora
- An Initial Study of Pilot-Adaptive Controller Interactions in Flight ControlDocumento12 pagineAn Initial Study of Pilot-Adaptive Controller Interactions in Flight ControlJovan BoskovicNessuna valutazione finora
- Asadi2021 Article Fault-TolerantTrajectoryTrackiDocumento14 pagineAsadi2021 Article Fault-TolerantTrajectoryTrackiYaser NabaviNessuna valutazione finora
- Conflict Detection and Resolution in Air Traffic Management Based On Graph Coloring Problem Using Imperialist Competitive AlgorithmDocumento16 pagineConflict Detection and Resolution in Air Traffic Management Based On Graph Coloring Problem Using Imperialist Competitive AlgorithmijitcajournalNessuna valutazione finora
- InTech-Acceleration Based 3d Flight Control For Uavs Strategy and Longitudinal DesignDocumento24 pagineInTech-Acceleration Based 3d Flight Control For Uavs Strategy and Longitudinal DesignAndrei BadulescuNessuna valutazione finora
- European Journal of Operational Research: Clément Peyronne, Andrew R. Conn, Marcel Mongeau, Daniel DelahayeDocumento11 pagineEuropean Journal of Operational Research: Clément Peyronne, Andrew R. Conn, Marcel Mongeau, Daniel DelahayenazzNessuna valutazione finora
- Aeroservoelastic Modeling, Analysis, and Design Techniques PDFDocumento12 pagineAeroservoelastic Modeling, Analysis, and Design Techniques PDFkarthekeyanmenonNessuna valutazione finora
- Analysis of Automated Aircraft Conflict Resolution and Weather AvoidanceDocumento15 pagineAnalysis of Automated Aircraft Conflict Resolution and Weather Avoidancenicolae adrian DincaNessuna valutazione finora
- CSD146Documento4 pagineCSD146Erlan MedranoNessuna valutazione finora
- Formal Verification of Curved Flight Collision Avoidance Maneuvers: A Case StudyDocumento31 pagineFormal Verification of Curved Flight Collision Avoidance Maneuvers: A Case StudyAndreea SimionNessuna valutazione finora
- António J.M. Castro and Eugénio Oliveira: LIACC-NIAD&R, FEUP, DEI, University of Porto PortugalDocumento26 pagineAntónio J.M. Castro and Eugénio Oliveira: LIACC-NIAD&R, FEUP, DEI, University of Porto PortugalAdina SerbanNessuna valutazione finora
- In-Flight EstimationDocumento8 pagineIn-Flight EstimationSri SaiNessuna valutazione finora
- 2012, An Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool Box V66-159an Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool BoxDocumento4 pagine2012, An Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool Box V66-159an Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool BoxAph MazharNessuna valutazione finora
- A Complexity Indicator For 4D Flight Trajectories Based On Conflict ProbabilityDocumento6 pagineA Complexity Indicator For 4D Flight Trajectories Based On Conflict Probability18rosa18Nessuna valutazione finora
- Mathematical Modeling of UAVDocumento8 pagineMathematical Modeling of UAVDanny FernandoNessuna valutazione finora
- Adaptive Control for Damaged Aircraft StabilityDocumento24 pagineAdaptive Control for Damaged Aircraft StabilityMahesh KumbharNessuna valutazione finora
- AI-based Adaptive Control and Design of Autopilot System For Nonlinear UAVDocumento19 pagineAI-based Adaptive Control and Design of Autopilot System For Nonlinear UAVoluwakayode olabanjiNessuna valutazione finora
- FS For PilotDocumento5 pagineFS For PilotAlexShearNessuna valutazione finora
- 2013 Hou Icrafsda DsfasDocumento7 pagine2013 Hou Icrafsda DsfasyacobaschalewNessuna valutazione finora
- Collision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control AlgorithmDocumento11 pagineCollision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control Algorithmphantuan8antNessuna valutazione finora
- Stability of Spatially Distributed, Intersecting Aircraft Flows Under Sequential Conflict Resolution SchemesDocumento6 pagineStability of Spatially Distributed, Intersecting Aircraft Flows Under Sequential Conflict Resolution Schemesthand3Nessuna valutazione finora
- Application Research of MRAC in Fault-Tolerant Flight ControllerDocumento8 pagineApplication Research of MRAC in Fault-Tolerant Flight ControlleradcadNessuna valutazione finora
- Comparison of Classical PD and Fuzzy PD Controller Performances of An Aircraft Pitch Angle Control SystemDocumento9 pagineComparison of Classical PD and Fuzzy PD Controller Performances of An Aircraft Pitch Angle Control SystemDalia MuraddNessuna valutazione finora
- Resilient Flight Control An Architecture For Human Supervision of AutomationDocumento14 pagineResilient Flight Control An Architecture For Human Supervision of AutomationCarlos F A MouraNessuna valutazione finora
- Nonlinear Dynamic Inversion Controller Design for Fixed Wing Aircraft Trajectory FollowingDocumento8 pagineNonlinear Dynamic Inversion Controller Design for Fixed Wing Aircraft Trajectory FollowingHimanshuPrabhatNessuna valutazione finora
- Sliding Mode Methods For Fault Detection and Fault Tolerant ControlDocumento12 pagineSliding Mode Methods For Fault Detection and Fault Tolerant ControljopiterNessuna valutazione finora
- TRC 2018 BoardingPrediction PreprintDocumento20 pagineTRC 2018 BoardingPrediction PreprintNgan NguyenNessuna valutazione finora
- Civil Aircraft Autopilot Design Using Robust ControlDocumento92 pagineCivil Aircraft Autopilot Design Using Robust ControlMohammad Reza MadadiNessuna valutazione finora
- Adaptive Backstepping Flight Control for Mini-UAVDocumento18 pagineAdaptive Backstepping Flight Control for Mini-UAVoussama sadkiNessuna valutazione finora
- Remotely Piloted Aircraft Fleet Development ModelDocumento14 pagineRemotely Piloted Aircraft Fleet Development ModelSonal KaliaNessuna valutazione finora
- Nonlinear Control of PVTOL Vehicles Subjected To Drag and LiftDocumento7 pagineNonlinear Control of PVTOL Vehicles Subjected To Drag and LiftDaniele PucciNessuna valutazione finora
- Flight Control Laws Carefree Handling Clearance of A Highly Manoeuvrable Aircraft Using Multi-Strategy Adaptive Global OptimizationDocumento15 pagineFlight Control Laws Carefree Handling Clearance of A Highly Manoeuvrable Aircraft Using Multi-Strategy Adaptive Global OptimizationBlaze123xNessuna valutazione finora
- Cooperative Control of Multiple QuadrotoDocumento10 pagineCooperative Control of Multiple QuadrotoTomislav SertićNessuna valutazione finora
- Conflict Resolution Problems For Air Traffic Management Systems Solved With Mixed Integer ProgrammingDocumento9 pagineConflict Resolution Problems For Air Traffic Management Systems Solved With Mixed Integer ProgrammingMarcelo RodriguesNessuna valutazione finora
- Scientific Paper TitleDocumento7 pagineScientific Paper Titlemohammedagag18Nessuna valutazione finora
- Control Systems for Drones and AUVs in High WindsDocumento28 pagineControl Systems for Drones and AUVs in High Windshw606Nessuna valutazione finora
- InTech-Using Fuzzy Control For Modeling The Control Behaviour of A Human PilotDocumento30 pagineInTech-Using Fuzzy Control For Modeling The Control Behaviour of A Human Pilotm_bazrafkanNessuna valutazione finora
- Nonlinear Model Predictive Control For Aerial ManipulationDocumento7 pagineNonlinear Model Predictive Control For Aerial ManipulationBlue starNessuna valutazione finora
- Evaluation of Impacts of Adaptive Cruise Control On Mixed Traffic FlowDocumento8 pagineEvaluation of Impacts of Adaptive Cruise Control On Mixed Traffic FlowGrandis AdiatmaNessuna valutazione finora
- Application Research of Mrac in Fault Tolerant Flight ControllerDocumento10 pagineApplication Research of Mrac in Fault Tolerant Flight ControllerNilesh LambeNessuna valutazione finora
- 4 2Documento4 pagine4 2Muhammad ShoaibNessuna valutazione finora
- A Comparative Analysis of Intelligent and PID Controllers For An Aircraft Pitch Control SystemDocumento9 pagineA Comparative Analysis of Intelligent and PID Controllers For An Aircraft Pitch Control SystemNors NoorNessuna valutazione finora
- Advances in Flight Control SystemsDocumento310 pagineAdvances in Flight Control SystemsNumkang KangNessuna valutazione finora
- Tmp37e4 TMPDocumento9 pagineTmp37e4 TMPFrontiersNessuna valutazione finora
- Open AeroDocumento16 pagineOpen AerodasdllllNessuna valutazione finora
- A Piloted Evaluation of Damage Accommodating Flight Control Using A Remotely Piloted VehicleDocumento20 pagineA Piloted Evaluation of Damage Accommodating Flight Control Using A Remotely Piloted VehicleP_leeNessuna valutazione finora
- Autonomous Air Traffic Controller: A Deep Multi-Agent Reinforcement Learning ApproachDocumento10 pagineAutonomous Air Traffic Controller: A Deep Multi-Agent Reinforcement Learning ApproachManoj MaggotNessuna valutazione finora
- Published VersionDocumento13 paginePublished VersionarslansayaniNessuna valutazione finora
- Modes in Human-Machine Systems ReviewDocumento13 pagineModes in Human-Machine Systems ReviewpramodNessuna valutazione finora
- 39 Kochenderfer Final Paper 4-15-11Documento8 pagine39 Kochenderfer Final Paper 4-15-11Nasir AhmedNessuna valutazione finora
- RG Dcs LPR Eco Robotica08Documento6 pagineRG Dcs LPR Eco Robotica08endoparasiteNessuna valutazione finora
- 01 Fuzzy Model Reference Learning Control For Cargo Ship SteeringDocumento12 pagine01 Fuzzy Model Reference Learning Control For Cargo Ship SteeringermankoybasiNessuna valutazione finora
- Integrated Guidance and Control of Missiles With - D MethodDocumento12 pagineIntegrated Guidance and Control of Missiles With - D Methodafe2000must9083Nessuna valutazione finora
- Robust Take-Off For A Quadrotor VehicleDocumento9 pagineRobust Take-Off For A Quadrotor Vehicleelguerrero66Nessuna valutazione finora
- Automatic Flight Control Report Akash Shevate FinalDocumento43 pagineAutomatic Flight Control Report Akash Shevate FinalAkash ShevateNessuna valutazione finora
- Automatic Flight Control SystemsDocumento610 pagineAutomatic Flight Control SystemsEmmanuel Constantino Vargas100% (1)
- Programmable Force-Feedback Side-Stick For Flight SimulationDocumento5 pagineProgrammable Force-Feedback Side-Stick For Flight SimulationAnirudh IndanaNessuna valutazione finora
- Fram IntroDocumento9 pagineFram Introalibaba1888Nessuna valutazione finora
- Adaptive Neural Controller Stabilizes Quadrotor UAV Using MRASDocumento3 pagineAdaptive Neural Controller Stabilizes Quadrotor UAV Using MRASSyed MamnoonNessuna valutazione finora
- Zhang - LCA of Solid State Perovskite Solar CellsDocumento12 pagineZhang - LCA of Solid State Perovskite Solar CellsISSSTNetwork100% (1)
- Dundar - Robust Optimization Evaluation of Relience On Locally Produced FoodsDocumento9 pagineDundar - Robust Optimization Evaluation of Relience On Locally Produced FoodsISSSTNetworkNessuna valutazione finora
- Hanes - Evaluating Oppotunities To Improve Material and Energy ImpactsDocumento12 pagineHanes - Evaluating Oppotunities To Improve Material and Energy ImpactsISSSTNetworkNessuna valutazione finora
- Nelson - Literacy and Leadership Management Skills of Sustainable Product DesignersDocumento11 pagineNelson - Literacy and Leadership Management Skills of Sustainable Product DesignersISSSTNetworkNessuna valutazione finora
- Abbasi - End of Life Considerations For Glucose BiosensorsDocumento7 pagineAbbasi - End of Life Considerations For Glucose BiosensorsISSSTNetworkNessuna valutazione finora
- Berardy - Vulnerability in Food, Energy and Water Nexus in ArizonaDocumento15 pagineBerardy - Vulnerability in Food, Energy and Water Nexus in ArizonaISSSTNetworkNessuna valutazione finora
- Collins - Physical and Chemical Degradation of BatteriesDocumento6 pagineCollins - Physical and Chemical Degradation of BatteriesISSSTNetworkNessuna valutazione finora
- Cao - Modeling of Adoption of High-Efficiency LightingDocumento8 pagineCao - Modeling of Adoption of High-Efficiency LightingISSSTNetworkNessuna valutazione finora
- Collier - Value Chain For Next Generation Aviation BiofuelsDocumento18 pagineCollier - Value Chain For Next Generation Aviation BiofuelsISSSTNetworkNessuna valutazione finora
- Kuczenski - Privacy Preserving Aggregation in LCADocumento9 pagineKuczenski - Privacy Preserving Aggregation in LCAISSSTNetworkNessuna valutazione finora
- Kachumbron - Diary Reading of Grass Root Level InstitutionsDocumento9 pagineKachumbron - Diary Reading of Grass Root Level InstitutionsISSSTNetworkNessuna valutazione finora
- Campion - Integrating Environmental and Cost Assessments For Data Driven Decision-Making: A Roof Retrofit Case StudyDocumento11 pagineCampion - Integrating Environmental and Cost Assessments For Data Driven Decision-Making: A Roof Retrofit Case StudyISSSTNetworkNessuna valutazione finora
- Tu - Unknown PollutionDocumento9 pagineTu - Unknown PollutionISSSTNetworkNessuna valutazione finora
- Parker - Striving For Standards in SustainabilityDocumento10 pagineParker - Striving For Standards in SustainabilityISSSTNetwork100% (1)
- Lee - Addressing Supply - and Demand-Side Heterogeneity and Uncertainty Factors in Transportation Life-Cycle Assessment: The Case of Refuse Truck ElectrificationDocumento9 pagineLee - Addressing Supply - and Demand-Side Heterogeneity and Uncertainty Factors in Transportation Life-Cycle Assessment: The Case of Refuse Truck ElectrificationISSSTNetworkNessuna valutazione finora
- Shi - Benefits of Individually Optimized Electric Vehicle Battery RangeDocumento8 pagineShi - Benefits of Individually Optimized Electric Vehicle Battery RangeISSSTNetworkNessuna valutazione finora
- Guschwan - Gamiformics: A Systems-Based Framework For Moral Learning Through GamesDocumento6 pagineGuschwan - Gamiformics: A Systems-Based Framework For Moral Learning Through GamesISSSTNetworkNessuna valutazione finora
- Momin - Role of Artificial Roughness in Solar Air HeatersDocumento5 pagineMomin - Role of Artificial Roughness in Solar Air HeatersISSSTNetworkNessuna valutazione finora
- Reyes-Sanchez - Beyond Just Light Bulbs: The Mitigation of Greenhouse Gas Emissions in The Housing Sector in Mexico CityDocumento14 pagineReyes-Sanchez - Beyond Just Light Bulbs: The Mitigation of Greenhouse Gas Emissions in The Housing Sector in Mexico CityISSSTNetworkNessuna valutazione finora
- Wang - Challenges in Validation of Sustainable Products and Services in The Green MarketplaceDocumento8 pagineWang - Challenges in Validation of Sustainable Products and Services in The Green MarketplaceISSSTNetworkNessuna valutazione finora
- Sweet - Learning Gardens: Sustainability Laboratories Growing High Performance BrainsDocumento8 pagineSweet - Learning Gardens: Sustainability Laboratories Growing High Performance BrainsISSSTNetworkNessuna valutazione finora
- Krishnaswamy - Assessment of Information Adequacy of Testing Products For SustainabilityDocumento7 pagineKrishnaswamy - Assessment of Information Adequacy of Testing Products For SustainabilityISSSTNetworkNessuna valutazione finora
- Dev - Is There A Net Energy Saving by The Use of Task Offloading in Mobile Devices?Documento10 pagineDev - Is There A Net Energy Saving by The Use of Task Offloading in Mobile Devices?ISSSTNetworkNessuna valutazione finora
- Cirucci - Retrospective GIS-Based Multi-Criteria Decision Analysis: A Case Study of California Waste Transfer Station Siting DecisionsDocumento15 pagineCirucci - Retrospective GIS-Based Multi-Criteria Decision Analysis: A Case Study of California Waste Transfer Station Siting DecisionsISSSTNetworkNessuna valutazione finora
- Ruini - A Workplace Canteen Education Program To Promote Healthy Eating and Environmental Protection. Barilla's "Sì - Mediterraneo" ProjectDocumento4 pagineRuini - A Workplace Canteen Education Program To Promote Healthy Eating and Environmental Protection. Barilla's "Sì - Mediterraneo" ProjectISSSTNetwork100% (1)
- Al-Ghamdi - Comparative Study of Different Assessment Tools For Whole-Building LCA in Relation To Green Building Rating SystemsDocumento8 pagineAl-Ghamdi - Comparative Study of Different Assessment Tools For Whole-Building LCA in Relation To Green Building Rating SystemsISSSTNetworkNessuna valutazione finora
- Graphic Tools and LCA To Promote Sustainable Food Consumption: The Double Food and Environmental Pyramid of The Barilla Center For Food and NutritionDocumento6 pagineGraphic Tools and LCA To Promote Sustainable Food Consumption: The Double Food and Environmental Pyramid of The Barilla Center For Food and NutritionISSSTNetworkNessuna valutazione finora
- Berardy - Life Cycle Assessment of Soy Protein IsolateDocumento14 pagineBerardy - Life Cycle Assessment of Soy Protein IsolateISSSTNetworkNessuna valutazione finora
- Component Reliability Report - 2021-03Documento90 pagineComponent Reliability Report - 2021-03Fred Sagrera100% (1)
- 747-200F Flight HandbookDocumento18 pagine747-200F Flight HandbookexpairtiseNessuna valutazione finora
- Working Title Citation CJ4: Quick Reference ChecklistDocumento4 pagineWorking Title Citation CJ4: Quick Reference ChecklisttomrachNessuna valutazione finora
- User ManualDocumento52 pagineUser ManualSaga dos simuladoresNessuna valutazione finora
- 5 Tutorial Flight 2 - Autopilot and Flight DirectorDocumento36 pagine5 Tutorial Flight 2 - Autopilot and Flight DirectorCarlos Henrique Peroni JuniorNessuna valutazione finora
- Design and 3D Modelling of Vertical Take Off and Landing (Vtol) Tilt Quad Rotorrc AircraftDocumento6 pagineDesign and 3D Modelling of Vertical Take Off and Landing (Vtol) Tilt Quad Rotorrc AircraftTushar KoulNessuna valutazione finora
- Human Factors Report S DekkerDocumento128 pagineHuman Factors Report S DekkerHighspeed FlyboyNessuna valutazione finora
- Ata 22Documento260 pagineAta 22Geovanni Riquelme LooNessuna valutazione finora
- Automatic Flight Control System ClassicaDocumento145 pagineAutomatic Flight Control System ClassicaM S PrasadNessuna valutazione finora
- Safety at Sea II 2020 PART 1Documento150 pagineSafety at Sea II 2020 PART 1MITHAT CAN SAHINGUNNessuna valutazione finora
- Full Text 01Documento108 pagineFull Text 01fluffa23Nessuna valutazione finora
- Air Septimanie - Standard Checklist Airbus A320-232 (Locked)Documento2 pagineAir Septimanie - Standard Checklist Airbus A320-232 (Locked)Dave Benedick Lariosa ApagNessuna valutazione finora
- Landing Performance Calculations for Airports with 5G C-Band NOTAMDocumento4 pagineLanding Performance Calculations for Airports with 5G C-Band NOTAMHarinder SinghNessuna valutazione finora
- Autobiography of pioneering aeromodeler Maynard L HillDocumento35 pagineAutobiography of pioneering aeromodeler Maynard L HillEric StephenNessuna valutazione finora
- 190 02291 45 - 05Documento44 pagine190 02291 45 - 05Héctor SánchezNessuna valutazione finora
- AFM-Embraer 170-Emergency and Abnormal Procedures-1385-003-FAA-SECTION04 PDFDocumento140 pagineAFM-Embraer 170-Emergency and Abnormal Procedures-1385-003-FAA-SECTION04 PDFitacatjrNessuna valutazione finora
- Checklist King Air 350 - Black SquareDocumento4 pagineChecklist King Air 350 - Black SquarePhilippe MagnoNessuna valutazione finora
- ZYX M User Manual EN PDFDocumento26 pagineZYX M User Manual EN PDFmaycolvNessuna valutazione finora
- Cessna Caravan G1000Documento76 pagineCessna Caravan G1000Flyingsas100% (4)
- Zibo Install GuideDocumento43 pagineZibo Install Guidekadir akkayaNessuna valutazione finora
- 27 StabilizerDocumento32 pagine27 StabilizerTarik Benzineb100% (1)
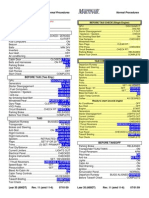
- Lear 35A Normal ChecklistDocumento2 pagineLear 35A Normal Checklistsdsf100% (3)
- Comanche Pilots Manual MSFSDocumento58 pagineComanche Pilots Manual MSFSdifjdjdjNessuna valutazione finora
- 155 B1 16.101.02 E IpadDocumento72 pagine155 B1 16.101.02 E IpadFlightdispatch Airjuan100% (1)
- 500 MTR Zone Checklist - IsMSBDocumento4 pagine500 MTR Zone Checklist - IsMSBRamli DisaNessuna valutazione finora
- GRT Autopilot Installation-Setup PDFDocumento34 pagineGRT Autopilot Installation-Setup PDFRizki AldillaNessuna valutazione finora
- QualityWings - Ultimate 757 Collection Users ManualDocumento209 pagineQualityWings - Ultimate 757 Collection Users ManualJOSHUA NAZARIONessuna valutazione finora
- 1 - Manual Dcs A10cDocumento97 pagine1 - Manual Dcs A10cGabriel ChellesNessuna valutazione finora
- A320 22Documento11 pagineA320 22morteeza1986Nessuna valutazione finora
- GP-150 Ome-BDocumento99 pagineGP-150 Ome-BcristianocalheirosNessuna valutazione finora