Potrebbero piacerti anche
- La ContabilidadDocumento3 pagineLa ContabilidadSergio IrvingNessuna valutazione finora
- Enlace La UnionDocumento4 pagineEnlace La UnionSergio IrvingNessuna valutazione finora
- La ContabilidadDocumento3 pagineLa ContabilidadSergio IrvingNessuna valutazione finora
- TelefoniaDocumento23 pagineTelefoniaDiegoSego21Nessuna valutazione finora
- Instalación Cámaras Adicionales EconogasDocumento4 pagineInstalación Cámaras Adicionales EconogasSergio IrvingNessuna valutazione finora
- DescargaDocumento1 paginaDescargaSergio IrvingNessuna valutazione finora
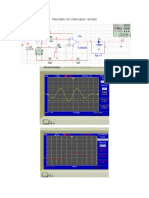
- Mezclado Con Interruptor Cerrado y AbiertoDocumento6 pagineMezclado Con Interruptor Cerrado y AbiertoSergio IrvingNessuna valutazione finora
- Caratula PikiDocumento1 paginaCaratula PikiSergio IrvingNessuna valutazione finora
- Función de Transferencia en Tiempo DiscretoDocumento10 pagineFunción de Transferencia en Tiempo DiscretoSergio IrvingNessuna valutazione finora
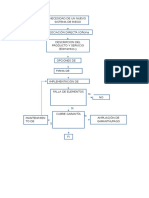
- Diagra FlujDocumento1 paginaDiagra FlujSergio IrvingNessuna valutazione finora
- Perfil-Tesis Refeer2Documento10 paginePerfil-Tesis Refeer2Sergio IrvingNessuna valutazione finora
- Solicitud Concurso Robótica StarbucksDocumento2 pagineSolicitud Concurso Robótica StarbucksSergio IrvingNessuna valutazione finora
- Bases Conceptuales de EpidemiologiaDocumento18 pagineBases Conceptuales de EpidemiologiaNerida Corzo Marticorena100% (1)
- Analisis Microbiologico de Fuente Hidrica CssDocumento3 pagineAnalisis Microbiologico de Fuente Hidrica CssJess HuntNessuna valutazione finora
- Los Círculos Del Infierno y Su SignificadoDocumento12 pagineLos Círculos Del Infierno y Su SignificadoPablo SalámNessuna valutazione finora
- Sistema de Utilización 750kvaDocumento36 pagineSistema de Utilización 750kvajoseli7o100% (1)
- ¿Cuándo Vendrá El Reino de Dios - ¿Cuándo Gobernará La TierraDocumento4 pagine¿Cuándo Vendrá El Reino de Dios - ¿Cuándo Gobernará La TierraBRYANNMNessuna valutazione finora
- Denotación y ConnotaciónDocumento3 pagineDenotación y ConnotaciónByron TúnchezNessuna valutazione finora
- Dogo de BurdeosDocumento8 pagineDogo de BurdeosPq XyhzcNessuna valutazione finora
- Grandes Puentes y Su Historia PDFDocumento41 pagineGrandes Puentes y Su Historia PDFCarlos TAPIA CABRERANessuna valutazione finora
- Sesión de Tutoría n9Documento6 pagineSesión de Tutoría n9Ronald Alcántara Quispe100% (1)
- 3reporte Clinico Miguel Ángel Ortiz Sánchez TERMINADODocumento14 pagine3reporte Clinico Miguel Ángel Ortiz Sánchez TERMINADOMiguel OrtizNessuna valutazione finora
- Avería en El Interruptor de Las Luces de Freno Del Grupo VAGDocumento4 pagineAvería en El Interruptor de Las Luces de Freno Del Grupo VAGMigautoymasNessuna valutazione finora
- Antimicoticos TopicosDocumento8 pagineAntimicoticos TopicosJoe Almeyda MagallanesNessuna valutazione finora
- Conocimiento EmpíricoDocumento3 pagineConocimiento EmpíricoJoSe Seclen RoqueNessuna valutazione finora
- Proyecto Mantenimiento Avenida JuncalDocumento19 pagineProyecto Mantenimiento Avenida JuncalJuly SalazarNessuna valutazione finora
- Guía Diagnostica y Nivelatoria Biologia 8 (Abcd) (5851)Documento6 pagineGuía Diagnostica y Nivelatoria Biologia 8 (Abcd) (5851)jair padillaNessuna valutazione finora
- Clase 1Documento29 pagineClase 1s03052cNessuna valutazione finora
- Grupo#11 Teoría GestalDocumento13 pagineGrupo#11 Teoría GestalCarolaine Scarlett Ortiz MonteroNessuna valutazione finora
- Brochure Mood Amenabar - Mobile-Min CompressDocumento20 pagineBrochure Mood Amenabar - Mobile-Min CompressRodriguezSusanaNessuna valutazione finora
- NanocelulosaDocumento6 pagineNanocelulosaKeissy San MartínNessuna valutazione finora
- Cuaderno de Problemas Mec. Maq - ALUMNOS PDFDocumento37 pagineCuaderno de Problemas Mec. Maq - ALUMNOS PDFAntonio CabreroNessuna valutazione finora
- Radicales AlquiloDocumento7 pagineRadicales AlquiloAlan Contreras100% (1)
- Como Identificar Las TexturasDocumento6 pagineComo Identificar Las TexturasSuary DiazNessuna valutazione finora
- Manual de Fertilidad de Suelos PDFDocumento85 pagineManual de Fertilidad de Suelos PDFJoseMendoza100% (10)
- Taller EDocumento10 pagineTaller EDani HernándezNessuna valutazione finora
- Práctico Funciones de Primer GradoDocumento3 paginePráctico Funciones de Primer GradoTote TochettiNessuna valutazione finora
- La Unidad Minera Raura SDocumento3 pagineLa Unidad Minera Raura SArems Ramírez RiveraNessuna valutazione finora
- Fast Ion BatteryDocumento16 pagineFast Ion BatteryMartín MaturanaNessuna valutazione finora
- Taller El PerfumeDocumento2 pagineTaller El PerfumeFinix ScottNessuna valutazione finora
- Ley de Propiedad Horizontal - AnalisisDocumento12 pagineLey de Propiedad Horizontal - AnalisisdefpearNessuna valutazione finora
- ARIZA Y GANDINI. El Analisis Comparativo Cualitativo Como Estrategia MetodologicaDocumento44 pagineARIZA Y GANDINI. El Analisis Comparativo Cualitativo Como Estrategia MetodologicaJo ArtNessuna valutazione finora