Potrebbero piacerti anche
- Life in The Middle Ages Unit Study - Grade 8Documento21 pagineLife in The Middle Ages Unit Study - Grade 8HCSLearningCommonsNessuna valutazione finora
- BLAST System: Different Decoders With Different Antennas: Pargat Singh Sidhu, Amit Grover, Neeti GroverDocumento6 pagineBLAST System: Different Decoders With Different Antennas: Pargat Singh Sidhu, Amit Grover, Neeti GroverIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Heres The Rest of Him-Kent H Steffgen-1968-192pgs-GOVDocumento192 pagineHeres The Rest of Him-Kent H Steffgen-1968-192pgs-GOVJeffrey Smith100% (1)
- Survey of MMSE Channel Equalizers: University of Illinois at ChicagoDocumento7 pagineSurvey of MMSE Channel Equalizers: University of Illinois at Chicagoamjc16Nessuna valutazione finora
- Reincarnated As A Sword Volume 12Documento263 pagineReincarnated As A Sword Volume 12Phil100% (1)
- 0 - Past Simple TenseDocumento84 pagine0 - Past Simple Tenseשחר וולפסוןNessuna valutazione finora
- Robust ML Detection Algorithm For Mimo Receivers in Presence of Channel Estimation ErrorDocumento5 pagineRobust ML Detection Algorithm For Mimo Receivers in Presence of Channel Estimation ErrortrNessuna valutazione finora
- 1st Year Unit 7 Writing A Letter About A CelebrationDocumento2 pagine1st Year Unit 7 Writing A Letter About A CelebrationmlooooolNessuna valutazione finora
- Alaska Non-Timber Forest Products Harvest ManualDocumento41 pagineAlaska Non-Timber Forest Products Harvest Manualtigriochelito100% (1)
- Minipro Anemia Kelompok 1Documento62 pagineMinipro Anemia Kelompok 1Vicia GloriaNessuna valutazione finora
- Modelling and Performance Analysis of Doa Estimation in Adaptive Signal ProcessingDocumento4 pagineModelling and Performance Analysis of Doa Estimation in Adaptive Signal ProcessingVinod Kumar GirrohNessuna valutazione finora
- Further Results On Differential Space-Time ModulationsDocumento9 pagineFurther Results On Differential Space-Time Modulationsalansi92004Nessuna valutazione finora
- Low Complexity For Antenna Selection For V-Blas Systems With OSIC DetectionDocumento7 pagineLow Complexity For Antenna Selection For V-Blas Systems With OSIC DetectionSang NguyenNessuna valutazione finora
- LMS Algorithm For Optimizing The Phased Array Antenna Radiation PatternDocumento5 pagineLMS Algorithm For Optimizing The Phased Array Antenna Radiation PatternJournal of TelecommunicationsNessuna valutazione finora
- Novel MIMO Detection Algorithm For High-Order Constellations in The Complex DomainDocumento14 pagineNovel MIMO Detection Algorithm For High-Order Constellations in The Complex DomainssivabeNessuna valutazione finora
- IR UWB TOA Estimation Techniques and Comparison: Sri Hareendra Bodduluri, Anil Solanki and Mani VVDocumento5 pagineIR UWB TOA Estimation Techniques and Comparison: Sri Hareendra Bodduluri, Anil Solanki and Mani VVinventionjournalsNessuna valutazione finora
- Spreading Sequences For Zero-Forcing DS-CDMA Multiuser DetectorsDocumento5 pagineSpreading Sequences For Zero-Forcing DS-CDMA Multiuser DetectorsGopal Jee MishraNessuna valutazione finora
- Blind Identification of Multichannel Systems Driven by Impulsive SignalsDocumento7 pagineBlind Identification of Multichannel Systems Driven by Impulsive SignalsRafael TorresNessuna valutazione finora
- Smart Antennas Adaptive Beamforming Through Statistical Signal Processing TechniquesDocumento6 pagineSmart Antennas Adaptive Beamforming Through Statistical Signal Processing TechniquesVijaya ShreeNessuna valutazione finora
- Performance of Mimo-Ofdm System For Rayleigh Fading Channel: Pallavi Bhatnagar, Jaikaran Singh, Mukesh TiwariDocumento4 paginePerformance of Mimo-Ofdm System For Rayleigh Fading Channel: Pallavi Bhatnagar, Jaikaran Singh, Mukesh TiwariNebiye SolomonNessuna valutazione finora
- Ijaiem 2014 11 17 52Documento5 pagineIjaiem 2014 11 17 52International Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Engineering Journal Multipath Parameter Estimation For Synthetic Aperture Sonar Using The SAGE AlgorithmDocumento11 pagineEngineering Journal Multipath Parameter Estimation For Synthetic Aperture Sonar Using The SAGE AlgorithmEngineering JournalNessuna valutazione finora
- Spacetime Signal Processing For Wireless Communications A SurveyDocumento4 pagineSpacetime Signal Processing For Wireless Communications A Surveyradhika myadari1814Nessuna valutazione finora
- Periodic Sequences With Optimal Properties For Channel Estimation and Fast Start-Up EqualizationDocumento6 paginePeriodic Sequences With Optimal Properties For Channel Estimation and Fast Start-Up Equalizationbavar88Nessuna valutazione finora
- On The Mutual Information Distribution of OFDM-Based Spatial Multiplexing: Exact Variance and Outage ApproximationDocumento18 pagineOn The Mutual Information Distribution of OFDM-Based Spatial Multiplexing: Exact Variance and Outage ApproximationKopuru TejaNessuna valutazione finora
- Ciflikli2009 - Artificial Neural Network Channel Estimation Based On Levenberg Marquardt For OFDM SystemsDocumento9 pagineCiflikli2009 - Artificial Neural Network Channel Estimation Based On Levenberg Marquardt For OFDM SystemsMahmud Ja'afarNessuna valutazione finora
- Signal Processing Via NNDocumento17 pagineSignal Processing Via NNRomil PatelNessuna valutazione finora
- Direction FindingDocumento5 pagineDirection FindingOlariNessuna valutazione finora
- Advanced Signal Processing Techniques For Wireless CommunicationsDocumento43 pagineAdvanced Signal Processing Techniques For Wireless CommunicationsShobha ShakyaNessuna valutazione finora
- Efficient Soft MIMO Detection Algorithms Based On Differential MetricsDocumento5 pagineEfficient Soft MIMO Detection Algorithms Based On Differential MetricsshyamNessuna valutazione finora
- Blind Source Separation Based On Time Frequency Signal RepresentationDocumento10 pagineBlind Source Separation Based On Time Frequency Signal Representationwanglei2112221990Nessuna valutazione finora
- International Journal of Computational Engineering Research (IJCER)Documento6 pagineInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Nessuna valutazione finora
- A Comparative Study of Different Entropies For Spectrum Sensing TechniquesDocumento15 pagineA Comparative Study of Different Entropies For Spectrum Sensing Techniquessuchi87Nessuna valutazione finora
- Signal Detection For 3GPP LTE Downlink: Algorithm and ImplementationDocumento14 pagineSignal Detection For 3GPP LTE Downlink: Algorithm and ImplementationThanh HoangNessuna valutazione finora
- Cooperative Diversity For Wireless Fading Channels Without Channel State InformationDocumento6 pagineCooperative Diversity For Wireless Fading Channels Without Channel State InformationGautam SamriyaNessuna valutazione finora
- Performance of Beamforming For Smart Antenna Using Traditional LMS Algorithm For Various ParametersDocumento6 paginePerformance of Beamforming For Smart Antenna Using Traditional LMS Algorithm For Various ParametersHải Ninh VănNessuna valutazione finora
- Subspace MethodsDocumento47 pagineSubspace MethodsSukanya VemulapalliNessuna valutazione finora
- Signal Processing: Chris Potter, Ganesh K. Venayagamoorthy, Kurt KosbarDocumento11 pagineSignal Processing: Chris Potter, Ganesh K. Venayagamoorthy, Kurt KosbarSonali DasNessuna valutazione finora
- Ec-202c - Adc Unit-5 - NotesDocumento22 pagineEc-202c - Adc Unit-5 - NotesshivaniNessuna valutazione finora
- Sample Generalized Eigenvalue Based Detection 1Documento23 pagineSample Generalized Eigenvalue Based Detection 1danjohhnNessuna valutazione finora
- Evaluation of Synthetic Communication Data Traces Obtained From Multifractal Algorithms Using Queueing TheoryDocumento10 pagineEvaluation of Synthetic Communication Data Traces Obtained From Multifractal Algorithms Using Queueing TheoryTongam Febri IndzNessuna valutazione finora
- Accurate Angle-of-Arrival Measurement Using Particle Swarm OptimizationDocumento7 pagineAccurate Angle-of-Arrival Measurement Using Particle Swarm OptimizationUtpal DasNessuna valutazione finora
- Adaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterDocumento7 pagineAdaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterMatthew Luis Llano LoveraNessuna valutazione finora
- Behavioral Modeling of Time-Interleaved ADCs UsingDocumento4 pagineBehavioral Modeling of Time-Interleaved ADCs Usingrezam56Nessuna valutazione finora
- Sukh 04560087 SukhDocumento7 pagineSukh 04560087 SukhmalhiavtarsinghNessuna valutazione finora
- Practical Issues Implementing Analog-to-Information: ConvertersDocumento6 paginePractical Issues Implementing Analog-to-Information: ConvertersMimitech JohnNessuna valutazione finora
- Optimal MTM Spectral Estimation Based Detection For Cognitive Radio in HDTVDocumento5 pagineOptimal MTM Spectral Estimation Based Detection For Cognitive Radio in HDTVAbdul RahimNessuna valutazione finora
- NN in CommDocumento5 pagineNN in CommKashish NagpalNessuna valutazione finora
- Reduced Complexity Data-Aided and Code-Aided Frequency Offset Estimation For Flat-Fading MIMO ChannelsDocumento10 pagineReduced Complexity Data-Aided and Code-Aided Frequency Offset Estimation For Flat-Fading MIMO ChannelsSandeep SunkariNessuna valutazione finora
- MIMO Module 3 NotesDocumento22 pagineMIMO Module 3 NotesNikhilNessuna valutazione finora
- QUT Digital Repository:: Personal, Indoor and Mobile Radio Communications, 2006., Pages Pp. 1-5Documento6 pagineQUT Digital Repository:: Personal, Indoor and Mobile Radio Communications, 2006., Pages Pp. 1-5AnshBaghelaNessuna valutazione finora
- 92961v00 Modeling WirelessDocumento11 pagine92961v00 Modeling WirelessHANZ V2Nessuna valutazione finora
- Channel Estimation For Adaptive Frequency-Domain EqualizationDocumento11 pagineChannel Estimation For Adaptive Frequency-Domain Equalizationअमरेश झाNessuna valutazione finora
- Papr Reduction in Blind Mimo Ofdm Systems Based On Independent Component AnalysisDocumento5 paginePapr Reduction in Blind Mimo Ofdm Systems Based On Independent Component AnalysisManwinder SinghNessuna valutazione finora
- UntitledDocumento7 pagineUntitledMubarik AhmedNessuna valutazione finora
- Direction Finding of Multiple Wide-Band Emitters Using State Space ModelingDocumento26 pagineDirection Finding of Multiple Wide-Band Emitters Using State Space ModelingdanosieckiNessuna valutazione finora
- Regular-Pulse Excitation-A Novel Approach To Effective and Efficient Multipulse Coding of SpeechDocumento10 pagineRegular-Pulse Excitation-A Novel Approach To Effective and Efficient Multipulse Coding of SpeechΚουρδιστόςΑνανάςNessuna valutazione finora
- Adaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethDocumento7 pagineAdaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethIJERDNessuna valutazione finora
- Ref 19Documento11 pagineRef 19Sandeep SunkariNessuna valutazione finora
- Neural Network Adaptive Wavelets For Signal Representation and ClassificationDocumento10 pagineNeural Network Adaptive Wavelets For Signal Representation and ClassificationBlahNessuna valutazione finora
- Aes Audio DigitalDocumento40 pagineAes Audio DigitalAnonymous 2Ft4jV2Nessuna valutazione finora
- CPFSK Coherent DetectionDocumento14 pagineCPFSK Coherent DetectionJamil AhmadNessuna valutazione finora
- A Review Study On Mathematical Methods For Fault Detection Problems in Induction MotorsDocumento10 pagineA Review Study On Mathematical Methods For Fault Detection Problems in Induction MotorsDante GuajardoNessuna valutazione finora
- Fast Discrete Sinc-Interpolation: A Gold Standard For Image ResamplingDocumento69 pagineFast Discrete Sinc-Interpolation: A Gold Standard For Image ResamplingTri NguyenNessuna valutazione finora
- Echo Cancellation Using The Lms AlgorithmDocumento8 pagineEcho Cancellation Using The Lms AlgorithmVương Công ĐịnhNessuna valutazione finora
- Error-Correction on Non-Standard Communication ChannelsDa EverandError-Correction on Non-Standard Communication ChannelsNessuna valutazione finora
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsDa EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNessuna valutazione finora
- Draft WTP WK 02Documento2 pagineDraft WTP WK 02Joyce GeorgeNessuna valutazione finora
- 101 L - PCL603 Assignment 3Documento2 pagine101 L - PCL603 Assignment 3Joyce GeorgeNessuna valutazione finora
- AssignmentDocumento3 pagineAssignmentJoyce GeorgeNessuna valutazione finora
- 103 Inac L - PCL404 Assignment 3Documento2 pagine103 Inac L - PCL404 Assignment 3Joyce GeorgeNessuna valutazione finora
- SQL New Case Study QuesDocumento3 pagineSQL New Case Study QuesJoyce GeorgeNessuna valutazione finora
- 101 L Assignment 1 For PCL603Documento1 pagina101 L Assignment 1 For PCL603Joyce GeorgeNessuna valutazione finora
- Code Course Title L - T - P Credit: Linear Applications of Op-Amp and Filters - Idealized Analysis of OPDocumento3 pagineCode Course Title L - T - P Credit: Linear Applications of Op-Amp and Filters - Idealized Analysis of OPJoyce GeorgeNessuna valutazione finora
- 102 Inac L-Oel 507Documento1 pagina102 Inac L-Oel 507Joyce GeorgeNessuna valutazione finora
- Online Course Analog CircuitsDocumento4 pagineOnline Course Analog CircuitsJoyce GeorgeNessuna valutazione finora
- PCL 603 Analog CircuitsDocumento1 paginaPCL 603 Analog CircuitsJoyce GeorgeNessuna valutazione finora
- Antenna and Guided WavesDocumento3 pagineAntenna and Guided WavesJoyce GeorgeNessuna valutazione finora
- Curriculum and Syllabus For The PG Course Executive Mtech Programme in Artificial Intelligence & Data ScienceDocumento20 pagineCurriculum and Syllabus For The PG Course Executive Mtech Programme in Artificial Intelligence & Data ScienceJoyce GeorgeNessuna valutazione finora
- Phase Shift Provided by One Phase Shift Network in RC Phase Shift Oscillator in 3 Stage IsDocumento5 paginePhase Shift Provided by One Phase Shift Network in RC Phase Shift Oscillator in 3 Stage IsJoyce GeorgeNessuna valutazione finora
- Digital Circuits - Unit 3 - Week 1Documento5 pagineDigital Circuits - Unit 3 - Week 1Joyce GeorgeNessuna valutazione finora
- Appendix 'F': Indian Naval Academy Joyce George Uzhuthuval Puthenpurayil, Kizhathadiyoor P.O., Pala - 686574 9048139795Documento1 paginaAppendix 'F': Indian Naval Academy Joyce George Uzhuthuval Puthenpurayil, Kizhathadiyoor P.O., Pala - 686574 9048139795Joyce GeorgeNessuna valutazione finora
- Op-Amp Assignment 1Documento5 pagineOp-Amp Assignment 1Joyce GeorgeNessuna valutazione finora
- Control Engineering - Unit 4 - Week 1Documento5 pagineControl Engineering - Unit 4 - Week 1Joyce GeorgeNessuna valutazione finora
- Assignment II::: Submission Date 23/03/2020 (100 INAC X)Documento1 paginaAssignment II::: Submission Date 23/03/2020 (100 INAC X)Joyce GeorgeNessuna valutazione finora
- Photonic Crystal Fibers and Supercontinnum GenerationDocumento7 paginePhotonic Crystal Fibers and Supercontinnum GenerationJoyce GeorgeNessuna valutazione finora
- XLGDQFH 1dyljdwlrq DQG &rqwuro Ri DQ 8Qpdqqhg +ryhufudiwDocumento8 pagineXLGDQFH 1dyljdwlrq DQG &rqwuro Ri DQ 8Qpdqqhg +ryhufudiwJoyce GeorgeNessuna valutazione finora
- Handouts On Antennas and Guided Waves-Part 1: PREPARED BY Assistant Professor Joyce GeorgeDocumento5 pagineHandouts On Antennas and Guided Waves-Part 1: PREPARED BY Assistant Professor Joyce GeorgeJoyce GeorgeNessuna valutazione finora
- Blue Print PDFDocumento1 paginaBlue Print PDFJoyce GeorgeNessuna valutazione finora
- Code Course Title L - T - P CreditDocumento3 pagineCode Course Title L - T - P CreditJoyce GeorgeNessuna valutazione finora
- List of Subject of Ece (By ECE Faculty)Documento106 pagineList of Subject of Ece (By ECE Faculty)Joyce GeorgeNessuna valutazione finora
- Programme OutcomesDocumento1 paginaProgramme OutcomesJoyce GeorgeNessuna valutazione finora
- Restitution of Conjugal RightsDocumento3 pagineRestitution of Conjugal Rightsvalerian fernandesNessuna valutazione finora
- What Is Talent AcquisitionDocumento6 pagineWhat Is Talent AcquisitionMJ KuhneNessuna valutazione finora
- IHL 1 BALLB ProjectDocumento16 pagineIHL 1 BALLB Projectabcde fghikjNessuna valutazione finora
- Best Resume Template CanadaDocumento4 pagineBest Resume Template Canadaafjwdprlzaxewj100% (2)
- Foe - PP v. Tomines - 9october2017Documento4 pagineFoe - PP v. Tomines - 9october2017Faith Roslyndale Fidés100% (1)
- Seng2011 - Assignment 5Documento11 pagineSeng2011 - Assignment 5yajnas1996Nessuna valutazione finora
- Dina Iordanova - Women in Balkan Cinema, Surviving On The MarginsDocumento17 pagineDina Iordanova - Women in Balkan Cinema, Surviving On The MarginsimparatulverdeNessuna valutazione finora
- Syllabus 20152acad. ListeDocumento4 pagineSyllabus 20152acad. ListeAgusAriyanNessuna valutazione finora
- Expansion and Contraction of Demand:: Change in Demand vs. Change in Quantity DemandedDocumento6 pagineExpansion and Contraction of Demand:: Change in Demand vs. Change in Quantity DemandedbadarNessuna valutazione finora
- Hunt v. United States, 4th Cir. (2004)Documento7 pagineHunt v. United States, 4th Cir. (2004)Scribd Government DocsNessuna valutazione finora
- Stellar Nations ResumeDocumento7 pagineStellar Nations ResumeAndré Luiz CarneiroNessuna valutazione finora
- 000 Digital Control LecturesDocumento67 pagine000 Digital Control LecturesPX PRNessuna valutazione finora
- Polytechnic University of The Philippines Basketball Athletes' Superstitious Rituals and Its Effects in Their Game PerformanceDocumento25 paginePolytechnic University of The Philippines Basketball Athletes' Superstitious Rituals and Its Effects in Their Game PerformanceJewo CanterasNessuna valutazione finora
- M-10 Content+Previous Years QuestionDocumento65 pagineM-10 Content+Previous Years QuestionOnline Physics Care by Syed Al-NahiyanNessuna valutazione finora
- Dharnish ReportDocumento13 pagineDharnish Reportdarshan75% (4)
- E. Zobel, Inc. v. CADocumento2 pagineE. Zobel, Inc. v. CAYllisa ZambranoNessuna valutazione finora
- Antenna and Propagation: Introduction + Basic ConceptsDocumento19 pagineAntenna and Propagation: Introduction + Basic Conceptsanon_584636667Nessuna valutazione finora
- Handbook PDFDocumento91 pagineHandbook PDFMohammad Suriyaidulman RianseNessuna valutazione finora
- Read Our Free Whitepaper: Philippine Supreme Court JurisprudenceDocumento32 pagineRead Our Free Whitepaper: Philippine Supreme Court JurisprudenceJoses Nino AguilarNessuna valutazione finora
- May 29Documento2 pagineMay 29gerrymattinglyNessuna valutazione finora
- Reaction Paper PoliticsDocumento1 paginaReaction Paper PoliticsDenise Jim GalantaNessuna valutazione finora
- Youcastr Case StudyDocumento2 pagineYoucastr Case StudyMomina NadeemNessuna valutazione finora
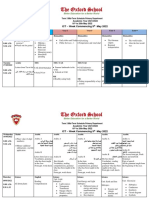
- Term 3 Mid-Term Assessment ScheduleDocumento9 pagineTerm 3 Mid-Term Assessment ScheduleRabia MoeedNessuna valutazione finora