Potrebbero piacerti anche
- CE5215-Theory and Applications of Cement Composites - Lecture 9Documento14 pagineCE5215-Theory and Applications of Cement Composites - Lecture 9Pranab BiswasNessuna valutazione finora
- CIE5260 Slides 2019Documento962 pagineCIE5260 Slides 2019language.ameyNessuna valutazione finora
- Vibration Chapter02 Ver2.0Documento147 pagineVibration Chapter02 Ver2.0Batuhan GünerNessuna valutazione finora
- Sinter PlantDocumento14 pagineSinter PlantKannan ThangarajuNessuna valutazione finora
- 2DOF Systems PDFDocumento41 pagine2DOF Systems PDFManavNessuna valutazione finora
- Ch2 & 3 ReviewDocumento42 pagineCh2 & 3 ReviewAnson ChanNessuna valutazione finora
- Boundary Value Problems in Linear ElasticityDocumento39 pagineBoundary Value Problems in Linear Elasticity박남수Nessuna valutazione finora
- CDNA14153ENC 001-No PDFDocumento96 pagineCDNA14153ENC 001-No PDFerosNessuna valutazione finora
- Torsion of A Non-Circular Bar PDFDocumento16 pagineTorsion of A Non-Circular Bar PDFPREM KUMARNessuna valutazione finora
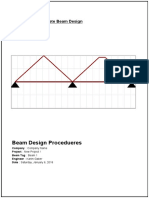
- Beam Design ProcedueresDocumento14 pagineBeam Design ProcedueresKarim SayedNessuna valutazione finora
- Attenuation RelationshipsDocumento144 pagineAttenuation RelationshipsCarlos Andrés Moreno HernándezNessuna valutazione finora
- Mechanical Vibration Lecture 5Documento50 pagineMechanical Vibration Lecture 5Mohanad Al-tahrawiNessuna valutazione finora
- Lefm NotesDocumento8 pagineLefm NotesSolomon GracioNessuna valutazione finora
- Durability TestsDocumento44 pagineDurability TestsBudigi Venkata Ramana PrasadNessuna valutazione finora
- Continuum Mechanics (George Backus) PDFDocumento387 pagineContinuum Mechanics (George Backus) PDFWanderlei Malaquias Pereira JuniorNessuna valutazione finora
- Department of Mechanical Engineering: National Institute of TechnologyDocumento38 pagineDepartment of Mechanical Engineering: National Institute of TechnologyRK ZazzyNessuna valutazione finora
- Chapter 23 Simple Harmonic MotionDocumento53 pagineChapter 23 Simple Harmonic MotionRahul OorathNessuna valutazione finora
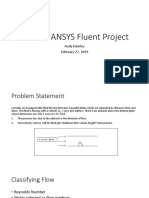
- Ansys Fluent Project in Advanced Fluid MechanicsDocumento42 pagineAnsys Fluent Project in Advanced Fluid Mechanicsالسيد الميالي النجفيNessuna valutazione finora
- Ept474 2dofDocumento118 pagineEpt474 2dofLeon OoNessuna valutazione finora
- Operations Research PDFDocumento2 pagineOperations Research PDFbingo50% (2)
- Chapter 6 Multidegree of Freedom SystemDocumento38 pagineChapter 6 Multidegree of Freedom SystemMuhammadFazrinNessuna valutazione finora
- Numerical Evaluation of Dynamic Response of MDOF SystemsDocumento39 pagineNumerical Evaluation of Dynamic Response of MDOF SystemsAhmet TükenNessuna valutazione finora
- 3-1-Theories of FailureDocumento35 pagine3-1-Theories of Failurevishal kumarNessuna valutazione finora
- 03 - Hilti Shear Connectors X-HVBDocumento8 pagine03 - Hilti Shear Connectors X-HVBing urban100% (1)
- Topic 3 (Fema) SdofDocumento217 pagineTopic 3 (Fema) SdofBenedictus CaturNessuna valutazione finora
- Galerkin MethodsDocumento7 pagineGalerkin MethodsM sNessuna valutazione finora
- Zienkiewicz History of FEMDocumento48 pagineZienkiewicz History of FEMeugeniuciobanuNessuna valutazione finora
- CEE 472 Syllabus-2013Documento3 pagineCEE 472 Syllabus-2013backpack2229Nessuna valutazione finora
- Fluid Structure Interaction EffectsDocumento51 pagineFluid Structure Interaction EffectsvttrlcNessuna valutazione finora
- Theory of Elasticity and PlasticityDocumento2 pagineTheory of Elasticity and PlasticityNaren GujjarNessuna valutazione finora
- Mathematical Models For Elastic Structures 2005 PDFDocumento691 pagineMathematical Models For Elastic Structures 2005 PDFomar gutierrezNessuna valutazione finora
- Article Review Thermal Buckling Plates ShellsDocumento22 pagineArticle Review Thermal Buckling Plates ShellsDinh Cuong TranNessuna valutazione finora
- 1 Logarthmic - DecrementDocumento5 pagine1 Logarthmic - DecrementAnup PatilNessuna valutazione finora
- Leissa - The Free Vibration of Rectangular PlatesDocumento37 pagineLeissa - The Free Vibration of Rectangular Platesallentvm100% (1)
- Modeling SCB Frames Using Beam-Column Elements: January 2013Documento28 pagineModeling SCB Frames Using Beam-Column Elements: January 2013Maha Moddather Hassan100% (1)
- The Yield-Line Method For Concrete Slabs: Automated at LastDocumento11 pagineThe Yield-Line Method For Concrete Slabs: Automated at LastMudassar KhanNessuna valutazione finora
- Advanced Mechanics of Solids by Arthur P Boresi & Schmidth 6 EdDocumento8 pagineAdvanced Mechanics of Solids by Arthur P Boresi & Schmidth 6 EdChaitanya RamNessuna valutazione finora
- Chapter10-Introduction To Fluid MechanicsDocumento8 pagineChapter10-Introduction To Fluid Mechanicssandrew784Nessuna valutazione finora
- 2 DOF NotesDocumento35 pagine2 DOF Noteslebron jamesNessuna valutazione finora
- Theory of Vibration With ApplicationDocumento16 pagineTheory of Vibration With ApplicationAndré Luiz Dos SantosNessuna valutazione finora
- DSLL1Documento53 pagineDSLL1simon maaaklaNessuna valutazione finora
- Slide 2nd Order ODEDocumento15 pagineSlide 2nd Order ODEAtikah JNessuna valutazione finora
- ) Advances in Structural Engineer Vasant Matsagar PDFDocumento9 pagine) Advances in Structural Engineer Vasant Matsagar PDFTiago CastelaniNessuna valutazione finora
- Numerical Evaluation of Dynamic ResponseDocumento20 pagineNumerical Evaluation of Dynamic Responsemacynthia26Nessuna valutazione finora
- Navier - Stokes Equation PDFDocumento10 pagineNavier - Stokes Equation PDFanagha sreenivasamNessuna valutazione finora
- Mechanical Vibrations Ecole Centrale NantesDocumento41 pagineMechanical Vibrations Ecole Centrale NantesAhmad Basshofi HabiebNessuna valutazione finora
- S TN RCS 001 PDFDocumento10 pagineS TN RCS 001 PDFRaul Bedoya HerediaNessuna valutazione finora
- Design of A Large Shaft With The Finite Element MethodDocumento1 paginaDesign of A Large Shaft With The Finite Element MethodrceajcNessuna valutazione finora
- Modal AnalysisDocumento26 pagineModal AnalysisTrinh Duy TanNessuna valutazione finora
- Seismic Analysis and Design: A Primer Recommended ReadingDocumento7 pagineSeismic Analysis and Design: A Primer Recommended Readingwaleed hassanNessuna valutazione finora
- Westergaard FormulaDocumento7 pagineWestergaard FormulashenNessuna valutazione finora
- Finite Element Analysis of Deep Beams On Nonlinear Elastic FoundationsDocumento30 pagineFinite Element Analysis of Deep Beams On Nonlinear Elastic FoundationsMostafa NouhNessuna valutazione finora
- Mirzaei FractureMechanicsLectureDocumento137 pagineMirzaei FractureMechanicsLectureElias Kapa100% (1)
- 10 Low and High Cycle FatigueDocumento14 pagine10 Low and High Cycle FatiguePRASAD326100% (1)
- Introduction To EurocodeDocumento35 pagineIntroduction To EurocodenurNessuna valutazione finora
- R.D. Mindlin and Applied Mechanics: A Collection of Studies in the Development of Applied Mechanics Dedicated to Professor Raymond D. Mindlin by His Former StudentsDa EverandR.D. Mindlin and Applied Mechanics: A Collection of Studies in the Development of Applied Mechanics Dedicated to Professor Raymond D. Mindlin by His Former StudentsNessuna valutazione finora
- Nonlinear Ordinary Differential Equations in Transport ProcessesDa EverandNonlinear Ordinary Differential Equations in Transport ProcessesNessuna valutazione finora
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989Da EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadNessuna valutazione finora
- Computational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsDa EverandComputational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsAhmed K. NoorNessuna valutazione finora
- Methodologies for Seismic Safety Evaluation of Existing Nuclear InstallationsDa EverandMethodologies for Seismic Safety Evaluation of Existing Nuclear InstallationsNessuna valutazione finora
- Free Vibrations of Circular Cylindrical ShellsDa EverandFree Vibrations of Circular Cylindrical ShellsNessuna valutazione finora
- E7495 Win8 User GuideDocumento30 pagineE7495 Win8 User Guidecborn99Nessuna valutazione finora
- Fine Art IndiaDocumento7 pagineFine Art IndiaKannan ThangarajuNessuna valutazione finora
- Lebo106 PDFDocumento31 pagineLebo106 PDFakhil_reddy7352Nessuna valutazione finora
- C++ Student Report Card System ProjectDocumento38 pagineC++ Student Report Card System ProjectKannan Thangaraju41% (17)
- Section 4 3 The Scattering Matrix LectureDocumento110 pagineSection 4 3 The Scattering Matrix LectureAsit kumar pradhanNessuna valutazione finora
- QR DecompositionDocumento10 pagineQR DecompositionthongloganNessuna valutazione finora
- 60 Days DSA ChallengeDocumento33 pagine60 Days DSA Challengepk100% (1)
- 3130908Documento3 pagine3130908Darshit KotadiyaNessuna valutazione finora
- Mathematics SyllabusDocumento13 pagineMathematics SyllabusSARTHAK SHARMANessuna valutazione finora
- Homework 2Documento3 pagineHomework 2Ishi TiwaNessuna valutazione finora
- Lattimore Szepesvari18bandit Algorithms PDFDocumento513 pagineLattimore Szepesvari18bandit Algorithms PDFAnkit PalNessuna valutazione finora
- Mit Ocw: 18.703 Modern Algebra Prof. James MckernanDocumento4 pagineMit Ocw: 18.703 Modern Algebra Prof. James Mckernanteesri_aankhNessuna valutazione finora
- Programming Practice (Solved 100+ Version 1)Documento99 pagineProgramming Practice (Solved 100+ Version 1)Iqra IjazNessuna valutazione finora
- Superquadrics and Their Geometric PropertiesDocumento27 pagineSuperquadrics and Their Geometric PropertiesBRANDON ALBERTO QUINTERO CIFUENTESNessuna valutazione finora
- Two Method Can by Applied To Reduce The Boolean Expression - Algebraic Using Karnaugh Map (K-Map)Documento78 pagineTwo Method Can by Applied To Reduce The Boolean Expression - Algebraic Using Karnaugh Map (K-Map)Udit AggarwalNessuna valutazione finora
- Wulff ConstructionDocumento2 pagineWulff ConstructionSgk ManikandanNessuna valutazione finora
- Representation of CNF and DNF by A Neural Net: PerceptronsDocumento2 pagineRepresentation of CNF and DNF by A Neural Net: PerceptronsRaghunath SiripudiNessuna valutazione finora
- Mathematics: Quarter 2 - Module 1 Illustrating Polynomial FunctionsDocumento17 pagineMathematics: Quarter 2 - Module 1 Illustrating Polynomial FunctionsGian Karlo BalderamaNessuna valutazione finora
- Artigo IEEE - PESCHON 1968 - Sensitivity in Power SystemsDocumento10 pagineArtigo IEEE - PESCHON 1968 - Sensitivity in Power SystemsAndrey LopesNessuna valutazione finora
- BAIRE GENERALIZED TOPOLOGICAL SPACES, GENERALIZED METRIC SPACES AND INFINITE GAMES E. KORCZAK-KUBIAK, A. LORANTY and R. J. PAWLAKDocumento29 pagineBAIRE GENERALIZED TOPOLOGICAL SPACES, GENERALIZED METRIC SPACES AND INFINITE GAMES E. KORCZAK-KUBIAK, A. LORANTY and R. J. PAWLAKGabriel medinaNessuna valutazione finora
- Ito's LemmaDocumento7 pagineIto's Lemmasambhu_nNessuna valutazione finora
- Data Mining - ClassificationDocumento53 pagineData Mining - ClassificationAndi WijayaNessuna valutazione finora
- Sphere and CylinderDocumento4 pagineSphere and Cylinderapi-358952299Nessuna valutazione finora
- Assignment 1 PDFDocumento55 pagineAssignment 1 PDFAasthaNessuna valutazione finora
- Mathematics C2 Pure MathematicsDocumento4 pagineMathematics C2 Pure MathematicsMatthew HigginsNessuna valutazione finora
- Measurement of Horizontal Distances 2Documento7 pagineMeasurement of Horizontal Distances 2JoshuaNessuna valutazione finora
- PPSC Mock Test 2 Akhtar AbbasDocumento4 paginePPSC Mock Test 2 Akhtar AbbasUmair AliNessuna valutazione finora
- Programming Assignments of Deep Learning Specialization 5 Courses 1Documento304 pagineProgramming Assignments of Deep Learning Specialization 5 Courses 1himanshu singhNessuna valutazione finora
- 27-05-2021-1622097292-6-IJGET-1. Dec - 2020-FOC - IJGET - Format-Relationship Between Shehu Transform With Some Other Integral TransformDocumento10 pagine27-05-2021-1622097292-6-IJGET-1. Dec - 2020-FOC - IJGET - Format-Relationship Between Shehu Transform With Some Other Integral Transformiaset123Nessuna valutazione finora
- QRT 1 WEEK 3 LM Lesson 10Documento4 pagineQRT 1 WEEK 3 LM Lesson 10clint xavier odangoNessuna valutazione finora
- MODULE 4-Basic Calculus PDFDocumento10 pagineMODULE 4-Basic Calculus PDFEzekiel0% (1)
- Trigonometry Ratios in Right TriangleDocumento19 pagineTrigonometry Ratios in Right Trianglemicaela Jomil TizonNessuna valutazione finora
- Numerical ReasoningDocumento9 pagineNumerical ReasoningDenise LabagnaoNessuna valutazione finora
- BBM 112 Foundation Mathematics PDFDocumento109 pagineBBM 112 Foundation Mathematics PDFjohn mwambuNessuna valutazione finora