Potrebbero piacerti anche
- PUMP SIZING SPREADSHEET FOR KEROSENE TRANSFERDocumento30 paginePUMP SIZING SPREADSHEET FOR KEROSENE TRANSFEREbby Onyekwe100% (1)
- Shallow Foundations: Discussions and Problem SolvingDa EverandShallow Foundations: Discussions and Problem SolvingValutazione: 5 su 5 stelle5/5 (1)
- Helical GearsDocumento24 pagineHelical GearsPrakash Joshi88% (8)
- Bevel Gear Load CapacityDocumento11 pagineBevel Gear Load CapacityAriel Rasjido50% (2)
- Calculation ExampleDocumento20 pagineCalculation Examplepavankumar0001Nessuna valutazione finora
- BevelDocumento20 pagineBevelOmer NadeemNessuna valutazione finora
- 215 Sample ChapterDocumento23 pagine215 Sample ChapterSreekumar RajendrababuNessuna valutazione finora
- Ultrasonic Testing HandbookDocumento89 pagineUltrasonic Testing HandbookSucipta Pratama100% (9)
- Planetary Gear SystemDocumento11 paginePlanetary Gear SystemNikhil NairNessuna valutazione finora
- Press and Shrink FitsDocumento11 paginePress and Shrink FitsAhmed M TNessuna valutazione finora
- Experimental Study of Loosening of Threaded Fasteners Due To Dynamic Shear LoadsDocumento18 pagineExperimental Study of Loosening of Threaded Fasteners Due To Dynamic Shear LoadsKailas GophaneNessuna valutazione finora
- Strength of Materials: An Introduction to the Analysis of Stress and StrainDa EverandStrength of Materials: An Introduction to the Analysis of Stress and StrainValutazione: 5 su 5 stelle5/5 (1)
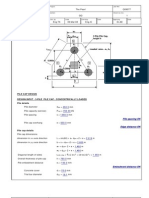
- Pile Cap Design 1Documento6 paginePile Cap Design 1kjpatel2100% (2)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsDa EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNessuna valutazione finora
- Stress InStress Intensity Factors For Threaded ConnectionstensityDocumento23 pagineStress InStress Intensity Factors For Threaded ConnectionstensityCorrado AnelliNessuna valutazione finora
- Lecture Notes on Reinforced Concrete DesignDa EverandLecture Notes on Reinforced Concrete DesignNessuna valutazione finora
- Sika FRP Design Program ManualDocumento10 pagineSika FRP Design Program ManualYoshua Yang100% (1)
- Spur Gear Design 1Documento16 pagineSpur Gear Design 1Nagu SriramaNessuna valutazione finora
- Design of Spur GearDocumento23 pagineDesign of Spur GearNiaz KhanNessuna valutazione finora
- SpurDocumento57 pagineSpurDangol RupeshNessuna valutazione finora
- MECH 344/M Machine Element DesignDocumento75 pagineMECH 344/M Machine Element DesignlitonNessuna valutazione finora
- Design and Analysis of Spur Gear Using AGMA StandardsDocumento74 pagineDesign and Analysis of Spur Gear Using AGMA StandardsMuhammad Zohaib AliNessuna valutazione finora
- CH 14Documento13 pagineCH 14mssaber77Nessuna valutazione finora
- How HCR gear geometry influences tooth forceDocumento7 pagineHow HCR gear geometry influences tooth forceVijet BhandiwadNessuna valutazione finora
- Gear Tooth Strength Analysis: 2006 by W.H.DornfeldDocumento14 pagineGear Tooth Strength Analysis: 2006 by W.H.DornfeldAhsan MumtazNessuna valutazione finora
- Ijmet 07 05 023Documento12 pagineIjmet 07 05 023SANDEEP BUDANIANessuna valutazione finora
- HTTP WWW - Google.co - in Url Q HTTP Nptel - Iitm.ac - in Courses IIT-MADRAS Machine Design II PDF 2 7Documento15 pagineHTTP WWW - Google.co - in Url Q HTTP Nptel - Iitm.ac - in Courses IIT-MADRAS Machine Design II PDF 2 7fiemsabyasachiNessuna valutazione finora
- Spur Gear DesignDocumento4 pagineSpur Gear DesignKB MambaNessuna valutazione finora
- Gear Tooth Strength Analysis: 2006 by W.H.DornfeldDocumento14 pagineGear Tooth Strength Analysis: 2006 by W.H.DornfeldlitonNessuna valutazione finora
- Elastic Analysis of Load Distribution in Wide Faced Spur GearsDocumento208 pagineElastic Analysis of Load Distribution in Wide Faced Spur GearsJulian Steward100% (1)
- Spur Gear DesignDocumento15 pagineSpur Gear DesignMaharaja KanthasamyNessuna valutazione finora
- Load Sharing On Spur Gear Teeth and Stress Analysis When Contact Ratio ChangedDocumento13 pagineLoad Sharing On Spur Gear Teeth and Stress Analysis When Contact Ratio ChangedKuldeep SharmaNessuna valutazione finora
- Load Sharing Based Fillet Stress Analysis of Involute Helical GearsDocumento5 pagineLoad Sharing Based Fillet Stress Analysis of Involute Helical GearsR Prabhu SekarNessuna valutazione finora
- Att - Frict - Capstan EquationDocumento16 pagineAtt - Frict - Capstan Equationarrtfiend2131Nessuna valutazione finora
- Strut Effectiveness Factor For Reinforced Concrete Deep Beams - 2Documento54 pagineStrut Effectiveness Factor For Reinforced Concrete Deep Beams - 2Fahmi HashimNessuna valutazione finora
- Tip ReliefDocumento12 pagineTip ReliefShriyaAgarwalNessuna valutazione finora
- HP T N / 63000 T W W F: Transmitted Load, LBDocumento35 pagineHP T N / 63000 T W W F: Transmitted Load, LBLayike Alemayehu100% (1)
- Esdep Lecture Note (Wg11.3.2)Documento13 pagineEsdep Lecture Note (Wg11.3.2)mabuhamdNessuna valutazione finora
- Basic Analysis of Gear-Tooth-Bending Stress (Lewis Equation)Documento3 pagineBasic Analysis of Gear-Tooth-Bending Stress (Lewis Equation)Ibrahim HussainNessuna valutazione finora
- Spur Gear Design for Mechanical Strength and Surface ResistanceDocumento6 pagineSpur Gear Design for Mechanical Strength and Surface ResistanceANILNessuna valutazione finora
- A New Photoelastic InvestigationDocumento8 pagineA New Photoelastic Investigationmshebbal2212Nessuna valutazione finora
- HSFG Bolts PDFDocumento12 pagineHSFG Bolts PDFmcwong_98Nessuna valutazione finora
- MMB411 Gears03 Bending&Fatigue PDFDocumento47 pagineMMB411 Gears03 Bending&Fatigue PDFNdivhuwo NdivhuwoNessuna valutazione finora
- Spur and Helical Gear DesignDocumento45 pagineSpur and Helical Gear Designkibromgidey12Nessuna valutazione finora
- Analysis of GearsDocumento14 pagineAnalysis of GearsShamma AlBlooshiNessuna valutazione finora
- 08 GVorotovicDocumento6 pagine08 GVorotovicMiguel Angel Alvarez BoreaNessuna valutazione finora
- Helical Gears Design and Analysis LectureDocumento21 pagineHelical Gears Design and Analysis LectureVivek MishraNessuna valutazione finora
- Path of Contact CalculationDocumento6 paginePath of Contact Calculationroberto_perraciniNessuna valutazione finora
- Rolling friction laws and measurement methodsDocumento20 pagineRolling friction laws and measurement methodsthakurkalidassNessuna valutazione finora
- PPTDocumento16 paginePPTVasthadu Vasu KannahNessuna valutazione finora
- Connecting Rod DesignDocumento8 pagineConnecting Rod DesignchandrasmgNessuna valutazione finora
- Static and Dynamic Analysis of High Contact Ratio Spur GearDocumento18 pagineStatic and Dynamic Analysis of High Contact Ratio Spur GearTibebu MerideNessuna valutazione finora
- International Journal of Computational Engineering Research (IJCER)Documento7 pagineInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)Nessuna valutazione finora
- Gear Defect Modeling of A MultipleDocumento12 pagineGear Defect Modeling of A MultipleJose Luis RattiaNessuna valutazione finora
- Guideways and Spindle DesignDocumento16 pagineGuideways and Spindle DesignAhmed MaherNessuna valutazione finora
- Stress Analysis and Fatigue of Welded StructuresDocumento7 pagineStress Analysis and Fatigue of Welded StructuresMANHAL KHRIAMANessuna valutazione finora
- Factors Affecting The Friction Between SurfacesDocumento12 pagineFactors Affecting The Friction Between Surfacesmatealoredana8015Nessuna valutazione finora
- Article: Laterally Offset Hss ConnectionsDocumento3 pagineArticle: Laterally Offset Hss Connectionsclam2014Nessuna valutazione finora
- Gear DesignDocumento41 pagineGear DesignJagan NathanNessuna valutazione finora
- Deformation Zone GeometryDocumento8 pagineDeformation Zone GeometryJayaganesh KhandigeNessuna valutazione finora
- Why Do We Take Initial Condition ZeroDocumento2 pagineWhy Do We Take Initial Condition ZeroavenashaNessuna valutazione finora
- Aggregate Production PlanningDocumento3 pagineAggregate Production PlanningavenashaNessuna valutazione finora
- Bank Exam Today - Career TodayDocumento22 pagineBank Exam Today - Career TodayRohithGiridharanNessuna valutazione finora
- Isometric ProjectionDocumento2 pagineIsometric Projectionavenasha100% (1)
- Course in Machine Design: Fatigue IDocumento58 pagineCourse in Machine Design: Fatigue IavenashaNessuna valutazione finora
- Radiation Exchange Between Surfaces: Enclosures With Nonparticipating MediaDocumento26 pagineRadiation Exchange Between Surfaces: Enclosures With Nonparticipating MediaavenashaNessuna valutazione finora
- Closed-Loop Control FundamentalsDocumento8 pagineClosed-Loop Control FundamentalsavenashaNessuna valutazione finora
- AnalogDocumento25 pagineAnalogavenashaNessuna valutazione finora
- Kinematics of Machines ExplainedDocumento227 pagineKinematics of Machines Explainedborchec100% (2)
- Types of NC SystemsDocumento2 pagineTypes of NC SystemsKrishna MohanNessuna valutazione finora
- Special CastingDocumento71 pagineSpecial CastingPawan RathiNessuna valutazione finora
- Failure TheoriesDocumento21 pagineFailure TheoriesMadhan Krishnamurthy100% (1)
- Thin FilmDocumento12 pagineThin FilmavenashaNessuna valutazione finora
- Trigonometry Formulas GuideDocumento5 pagineTrigonometry Formulas GuideCrimson PidlaoanNessuna valutazione finora
- Composite Failure TheoriesDocumento19 pagineComposite Failure TheoriesZach Lovering0% (1)
- Calculus GuideDocumento12 pagineCalculus GuideShahriar KNessuna valutazione finora
- Course in Machine Design: Fatigue IDocumento58 pagineCourse in Machine Design: Fatigue IavenashaNessuna valutazione finora
- Trigonometry Formulas GuideDocumento5 pagineTrigonometry Formulas GuideCrimson PidlaoanNessuna valutazione finora
- Process Parameters of Abrasive Jet MachingDocumento3 pagineProcess Parameters of Abrasive Jet MachingavenashaNessuna valutazione finora
- Chapter 9e FatigueDocumento20 pagineChapter 9e FatigueavenashaNessuna valutazione finora
- Aula 6Documento57 pagineAula 6avenashaNessuna valutazione finora
- Slip Vs TwinningDocumento1 paginaSlip Vs TwinningavenashaNessuna valutazione finora
- DvbdsvavDocumento1 paginaDvbdsvavavenashaNessuna valutazione finora
- ProbabilityDocumento42 pagineProbabilityPrashant TiwariNessuna valutazione finora
- Why liquid and gaseous fuels produce less smoke than solid fuelsDocumento2 pagineWhy liquid and gaseous fuels produce less smoke than solid fuelsavenashaNessuna valutazione finora
- CP CV GasesDocumento16 pagineCP CV GasesavenashaNessuna valutazione finora
- L06 Vacuum EvaporationDocumento30 pagineL06 Vacuum EvaporationavenashaNessuna valutazione finora
- Fluid Mechanics & MachinesDocumento307 pagineFluid Mechanics & MachinesKBSMANIT100% (9)
- Thermoacoustic CoolingDocumento10 pagineThermoacoustic CoolingElisabeth MorseNessuna valutazione finora
- FORCES AND INTERACTIONS NotesDocumento13 pagineFORCES AND INTERACTIONS NotesarjaNessuna valutazione finora
- Control of Inverted PendulumDocumento5 pagineControl of Inverted PendulumAhmed HwaidiNessuna valutazione finora
- String & Sound Waves, Home Work Sheet-8Documento2 pagineString & Sound Waves, Home Work Sheet-8Raval sagarNessuna valutazione finora
- Chap05 StaticFailureDocumento9 pagineChap05 StaticFailureFatih AŞCINessuna valutazione finora
- Hydraulics and Irrigation Engineering Lab ManualDocumento43 pagineHydraulics and Irrigation Engineering Lab ManualMuhammad Faisal AsifNessuna valutazione finora
- Bharathi Connection Design (22.5 X 56)Documento22 pagineBharathi Connection Design (22.5 X 56)Chandrasekhar ReddyNessuna valutazione finora
- Armfield F1 21 Datasheet v2b Web 1Documento1 paginaArmfield F1 21 Datasheet v2b Web 1Ibrahim ALsultanNessuna valutazione finora
- Basic Ultrasonic+Transducer TechnotesDocumento9 pagineBasic Ultrasonic+Transducer Technoteslram70Nessuna valutazione finora
- Cycloid GearboxesDocumento6 pagineCycloid GearboxesSaravanan PalanisamyNessuna valutazione finora
- ASTM D6641 - Standard Test Method For Compressive Properties of Polymer Matrix Composite Materials Using A Combined Loading Compression Test FixtureDocumento13 pagineASTM D6641 - Standard Test Method For Compressive Properties of Polymer Matrix Composite Materials Using A Combined Loading Compression Test FixtureGiuseppeNessuna valutazione finora
- Design of Block Machine Foundation in STAADPRODocumento3 pagineDesign of Block Machine Foundation in STAADPROVivek DhutNessuna valutazione finora
- Jee Mains Previous Year Paper Class 12 Physics 2023 15 April Shift 1 Actual Doubtnut English Medium 2023 Web 3Documento38 pagineJee Mains Previous Year Paper Class 12 Physics 2023 15 April Shift 1 Actual Doubtnut English Medium 2023 Web 3putinmodi3Nessuna valutazione finora
- MT1 Thermodynamics Practice QuestionsDocumento3 pagineMT1 Thermodynamics Practice Questionsmehmet candanNessuna valutazione finora
- Chapter-Two Part 1Documento26 pagineChapter-Two Part 1Wiz Nati XvNessuna valutazione finora
- Experiment No:06 Whirling of Shaft: Kinematics and Dynamics Lab Manual (ME406ES)Documento5 pagineExperiment No:06 Whirling of Shaft: Kinematics and Dynamics Lab Manual (ME406ES)Mallesh GujjarNessuna valutazione finora
- Agard Ag 54Documento148 pagineAgard Ag 54AeroenggNessuna valutazione finora
- Euler-Bernoulli Beam Theory - Simple English Wikipedia, The Free EncyclopediaDocumento2 pagineEuler-Bernoulli Beam Theory - Simple English Wikipedia, The Free EncyclopediaCordy Jourvel Itoua-TseleNessuna valutazione finora
- Seismic Load STG BuildingDocumento6 pagineSeismic Load STG BuildingWahyu MunajatNessuna valutazione finora
- STMDocumento33 pagineSTMHafidz OutsidersNessuna valutazione finora
- Assignment 3Documento3 pagineAssignment 3Kibrom GebremedhinNessuna valutazione finora
- THICK CYLINDERS-Lectures New PDFDocumento17 pagineTHICK CYLINDERS-Lectures New PDFManoj Hepde100% (1)
- Artículo Expansion MultipolarDocumento5 pagineArtículo Expansion Multipolarjose luis rodriguez amadoNessuna valutazione finora
- An Investigation of The Rubbing and Ploughing in Single Grain GrindingDocumento7 pagineAn Investigation of The Rubbing and Ploughing in Single Grain GrindingpbhambareNessuna valutazione finora
- Slug Tracking Simulation of Severe Slugging Experiments: Tor Kindsbekken Kjeldby, Ruud Henkes and Ole Jørgen NydalDocumento6 pagineSlug Tracking Simulation of Severe Slugging Experiments: Tor Kindsbekken Kjeldby, Ruud Henkes and Ole Jørgen NydalAyauwu LovedayNessuna valutazione finora
- (Ebook - English) Gaussian Inc, Exploring Chemistry With Electronic Structure MethodsDocumento335 pagine(Ebook - English) Gaussian Inc, Exploring Chemistry With Electronic Structure Methodsthiagocpimentel12100% (1)