Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- GDC31 DAC InternationalDocumento72 pagineGDC31 DAC InternationalSeção EletricaNessuna valutazione finora
- Consumer ComplaintDocumento9 pagineConsumer ComplaintMoin KhanNessuna valutazione finora
- DCS A-10c Flight ManualDocumento672 pagineDCS A-10c Flight ManualLetícia IsomuraNessuna valutazione finora
- Physics ProjectDocumento16 paginePhysics ProjectNAYAN DARYANINessuna valutazione finora
- Installation Manual Bizhub Pro 1050Documento19 pagineInstallation Manual Bizhub Pro 1050Hugo Luis Escalante100% (2)
- HY2019 CatalogueDocumento16 pagineHY2019 CatalogueKevin LeeNessuna valutazione finora
- Please Note That Cypress Is An Infineon Technologies CompanyDocumento22 paginePlease Note That Cypress Is An Infineon Technologies Company20c552244bNessuna valutazione finora
- P.E.L. Iec 61558-1 2017 2018-07-10Documento3 pagineP.E.L. Iec 61558-1 2017 2018-07-10முருகன்Nessuna valutazione finora
- Eric Bogatin - Practical Transmission Line Design and Measurement - Lossless Single-Ended Transmission Lines-Artech House (2020)Documento604 pagineEric Bogatin - Practical Transmission Line Design and Measurement - Lossless Single-Ended Transmission Lines-Artech House (2020)Fernando RubioNessuna valutazione finora
- ACS55 ABBmicrodrivesFlyer REVF ENDocumento2 pagineACS55 ABBmicrodrivesFlyer REVF ENHugo Patricio Roco CastroNessuna valutazione finora
- Netram Advance Study Kit For Arduino PDFDocumento140 pagineNetram Advance Study Kit For Arduino PDFJigman23Nessuna valutazione finora
- Manual SP Racing F3 Deluxe OSDDocumento2 pagineManual SP Racing F3 Deluxe OSDibyselfNessuna valutazione finora
- Ultra-Low-Power 27-Mhz Wireless Mouse Reference Design: Application ReportDocumento18 pagineUltra-Low-Power 27-Mhz Wireless Mouse Reference Design: Application ReportQuiteNessuna valutazione finora
- Habia Wire - DatasheetDocumento1 paginaHabia Wire - DatasheetAzhar KhanNessuna valutazione finora
- Using The UPLOAD Program To Update CADSTAR DOS Files To CADSTAR Windows FilesDocumento15 pagineUsing The UPLOAD Program To Update CADSTAR DOS Files To CADSTAR Windows FilesJames Head50% (2)
- TMS320C6748 DSP BOARD Package ContentDocumento22 pagineTMS320C6748 DSP BOARD Package ContentPrangya PradhanNessuna valutazione finora
- Chapter 10. Substitution Reactions of Alkyl HalidesDocumento49 pagineChapter 10. Substitution Reactions of Alkyl HalidesThanh NguyênNessuna valutazione finora
- BP SX 150: Proven Materials and ConstructionDocumento4 pagineBP SX 150: Proven Materials and ConstructionEdwin ManNessuna valutazione finora
- B503Sl Series Solar Photovoltaic Pump Controller: Instruction ManualDocumento32 pagineB503Sl Series Solar Photovoltaic Pump Controller: Instruction ManualSalah ali AlmorisyNessuna valutazione finora
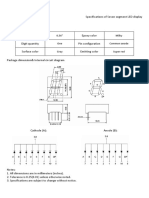
- 0.56" Milky Anode RedDocumento2 pagine0.56" Milky Anode RedPutinun TachavatapornNessuna valutazione finora
- TE30 Electricity Meter Tester and Power Quality Analyzer Presentation enDocumento19 pagineTE30 Electricity Meter Tester and Power Quality Analyzer Presentation enalejandroNessuna valutazione finora
- TPS A12 A12eDocumento12 pagineTPS A12 A12eJoserecon BonillaNessuna valutazione finora
- BEEDocumento151 pagineBEESrimanth Raj SRNessuna valutazione finora
- 3D - DTG-6000 - DatasheetDocumento2 pagine3D - DTG-6000 - DatasheetJames GeorgeNessuna valutazione finora
- S13-C57.12.90 Section 9.5 Zero Seq With Mods PDFDocumento5 pagineS13-C57.12.90 Section 9.5 Zero Seq With Mods PDFBash MatNessuna valutazione finora
- UHD UF680T 43.49.55.65 Spec 150907 PDFDocumento2 pagineUHD UF680T 43.49.55.65 Spec 150907 PDFfreemayNessuna valutazione finora
- NAME: Giella Irah C. Navaja Date: October 2020 TIME/SCHEDULE: TTH/2:30-4:00 ScoreDocumento5 pagineNAME: Giella Irah C. Navaja Date: October 2020 TIME/SCHEDULE: TTH/2:30-4:00 ScoreKimNessuna valutazione finora
- ComScore Training Deck ApprovedDocumento36 pagineComScore Training Deck ApprovedTuan Anh NguyenNessuna valutazione finora
- Sinclair Catalogue Fcu 2014 enDocumento8 pagineSinclair Catalogue Fcu 2014 enMiguel cejasNessuna valutazione finora
- All Type ESB ScriptsDocumento109 pagineAll Type ESB Scriptspraveen singh BhimNessuna valutazione finora